靶场全地形快速观测清场车系统
2022-03-21于国栋王春阳冯江海刘晓辰李忠琦
于国栋,王春阳,冯江海,刘晓辰,张 月,李忠琦
(中国人民解放军63850部队,吉林 白城 137001)
0 引言
靶场试验时,由于要保证弹丸落区范围内不能有人或者牲畜,在武器射击前,清场人员要先进入试验区域,以保证试验安全。目前,清场范围是在电子地图或者纸质地图上标定的,各清场人员按照标定的位置进行清场,清场后离开试验区域等候后续命令。没有合理的清场区域划分和路径规划,指挥人员不能实时掌握清场人员的位置,也不能确定是否存在遗漏清场或重复清场的情况。另外,目前完成清场任务的车辆多为越野车,对于落区地貌复杂的区域存在诸多限制。随着武器装备的不断发展,远程武器试验逐年增加,炮弹落区距离发射阵地较远,清场范围较大,导致清场过程中极易出现遗漏清场或重复清场的情况。如果落区道路复杂,车辆难以行驶,只能采用徒步,严重影响清场效率。
随着现代科技的不断发展和进步,以具备复杂地貌正常行驶能力的全地形车为运载平台[1],搭载具备语音调度、视频传输、路径规划、网络通信功能的清场设备[2-5]和具备弹丸落点测量功能的终点测量设备[6-7],必然会极大地提高靶场试验效率。因此,为解决上述问题,提出一种全地形快速观测清场车系统,主要用于完成复杂地貌场区的清场、找弹着点、终点坐标概略观测等任务。
1 工作原理
全地形快速观测清场车系统由全地形车子系统、快速清场子系统、终点坐标观测子系统三部分组成。
全地形车主要由动力传动系统、差速制动转向系统和动力舱三个部分组成。用于承载清场人员及观测、清场设备。
快速清场子系统由基站、车载终端、手持终端等组成。基站负责接收清场区域的图像、清场人员的车辆轨迹及语音。车载终端集成视频采集设备、语音输入设备等。手持终端主要装备给各个清场人员,集成了语音输入模块、视频输入模块、定位模块等。
终点坐标观测子系统主要由测量摄像机、图像无线传输设备、电源及数据处理软件等部分组成。测量摄像机负责拍摄落区图像,图像无线传输设备负责向基站实时传输图像信息,基站接收到信息后提供给数据处理软件进行处理,数据处理软件提取相关目标信息,交会计算得出炸点的终点概略坐标。
全地形快速观测清场车系统的工作模式如图1所示。清场前,将清场子系统的手持终端发放给各清场人员,全地形车子系统搭载指挥人员和快速清场子系统,建立覆盖试验场区的网络信号;划分清场区域,并快速提取清场区域具备边缘特性的GPS数据点[8],车载终端通过网络基站建立的网络信号将GPS数据点发送至清场人员所携带的手持终端上;清场人员通过手持终端接收到清场区域及车辆行走路径后,开启导航软件,按指定的路径在清场区域内完成清场任务;同时手持终端内置的定位模块会将清场人员行走的路径实时回传到指挥车,指挥员根据各清场人员回传的路径信息与预先划分完成清场区域进行对比,如发生重复清场、遗漏清场的情况,则通过语音调度模块及时进行纠正。
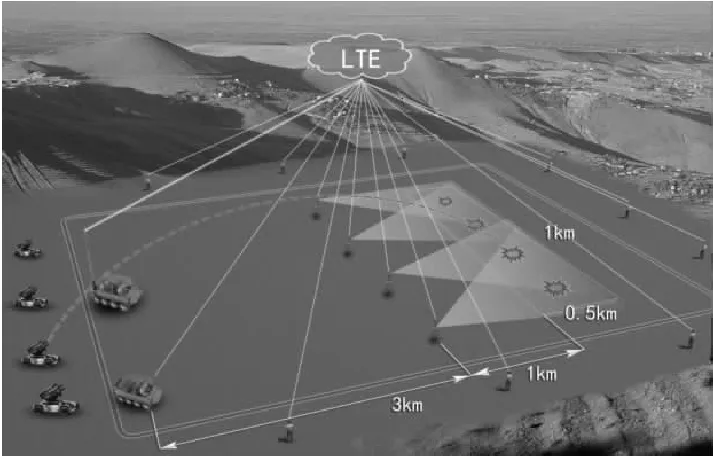
图1 全地形快速观测清场车系统工作模式示意图Fig.1 Working mode of all terrain rapid observation and clearing warning vehicle system
当需要测量炮弹落点坐标时,全地形车子系统搭载终点观测子系统,驾驶至指定位置并架设仪器,各测量点位的操作人员完成方位标定工作后,将摄像机转向炮弹落区处,尽量保证视场能够覆盖既定的弹着点区域。开启无线图像传输设备,操作人员乘坐全地形车退至安全区域以外,操作人员可通过无线图像传输设备回传的视频信息实时监控弹着点区域。当弹丸落地爆炸后,各测量点的测量摄像机记录各自区域内的图像,北斗双模授时模块负责各摄像机时间信息同步,测角仪记录摄像机的高低和俯仰角度。图像存储器集成了相机控制模块和存储模块,可远程控制摄像机的复位和图像采集、记录。通过回放查找到目标点所在的图像,通过网络向各观测点发送指令,要求将指定时间段的图像传送到车载终端,操作人员完成各观测点目标信息提取和交会处理工作,计算得到弹丸落点坐标。试验结束后,将弹丸落点的概略坐标发送至清场人员的手持终端上,通过导航软件引导清场人员进入弹丸落区寻找弹坑。
2 清场子系统
清场子系统是以全地形车为运载平台构建的一套具备语音调度、视频传输、网络覆盖等功能的系统。作为整个系统的指挥中心,在执行清场任务时,需要根据清场人员数量现有条件,实时、高效、合理地规划清场人员各自负责的清场区域,避免清场区域的重复规划和遗漏规划;在语音调度上作为整个系统的处置单位,需要根据清场人员回传的清场路径信息,指挥人员通过语音调度功能实时调整清场人员的清场区域及清场路径。因此,必须具备电子地图导入、更新、显示,清场方案规划,标记停车点,清场路径信息传输,获取清场人员实际行走路径,点对点、点对多点的语音调度等功能。各个清场人员的手持终端是与指挥员进行沟通的设备,也必须具有电子地图导入、更新、显示、导航、定位及语音通话等功能。
1) 路径规划和区域划分
指挥员根据清场人员数量和道路情况合理分配工作量,在电子地图上划分清场区域,一些重要路口必须标记清楚,将标注好的地图发送给各清场人员的手持终端,并做好备份。
区域特性信息提取:根据区域划分结果提取其特征信息,特征信息主要包含划分区域边缘位置特征点,包括边界点的个数和坐标等。路径传输:将各清场区域优化后的路径位置特征点通过基站传输至清场人员手持终端。路径规划:实现区域边缘位置特征点的运算生成清场人员行走路线,同时清场指挥员根据电子地图对比手动更改行走路线,优化清场人员行走路线使其更加合理、高效、最优。
2) 实时导航及位置信息反馈
手持终端上有定位模块,可以实时获取设备的当前位置信息,并且将实际位置信息以路径的形式标注在电子地图上,方便查看实际行走路线。当前位置信息同时传输至车载终端,指挥员在电子地图上也可以实时标注手持终端的行走路线。
3) 语音通话及视频调度
语音通话实现拨打、接听和挂断的全过程操作,包括信令接收、建立通话、音频解析、语音传输等,可满足用户在不同的终端使用相同的协议进行通话。车载终端对于手持终端的视频调度可以满足同时打开多路窗口,按分页的形式进行切换显示,以达到掌握多个清场区域情况的能力。
3 试验和结果
终点坐标观测子系统的测量摄像机镜头存在畸变[9],为提高测量精度,使用前需要进行相机标定。试验使用Halcon17.2软件[10]进行相机标定,标准Halcon标定板的尺寸为400 mm×400 mm,图案尺寸为320 mm×320 mm,圆直径20 mm,圆中心距为40 mm。测量摄像机的图像分辨率为1 280×1 024,像元大小为10 μm,镜头焦距为16 mm。对镜头进行畸变校正后,将大大提高设备的测量精度。
在试验场区对终点坐标观测子系统的性能进行验证,以获取其炸点坐标测量精度,图2为试验现场。将测量摄像机以间隔300 m进行布设,每个测站与炸点的距离大约500 m,尽量使测站与炸点的几何关系达到理想图形。

图2 炸点坐标测量现场Fig.2 Scene of explossion point coordinate measurement
试验共出现15个炸点,均在摄像机视场范围内,分布随机且均匀。测量摄像机采集了炸点出现时的图像,通过文献[11]中的计算脱靶量公式算出每个测站的角度脱靶量,再利用文献[12-13]中的交会计算公式得出炸点的概略坐标。为了验证炸点的测量精度,同时布设了靶场某型高精度测量经纬仪系统同时对15个炸点目标进行测量,该设备的测角精度为20 s,换算到500 m测距,测量精度大约为0.1 m,其精度远大于终点坐标观测子系统,因此,可将高精度测量经纬仪系统的测量结果作为真值。两个系统的测量结果差值作为终点坐标观测子系统的误差。15个炸点目标在三个方向上的误差均在±4 m以内。利用均方差公式计算得到,三个方向的误差中误差为,mx=±2.3 m,my=±1.9 m,mz=±0.9 m。这样的精度指标,对于一个简易、快速的炸点测量系统已经足够。
4 结论
本文提出全地形快速观测清场车系统,该系统用于完成靶场试验中的清场警戒、快速找弹着点、终点坐标概略观测等任务。以全地形车底盘为运载平台,搭载多套子系统,在复杂地形下提供了高机动性;构建以区域宽带无线网络为核心,能满足在大范围试验场区内进行数据、语音、图像以及视频等多媒体传输能力,极大地提高了清场效率;通过对测量摄像机进行了畸变矫正,提高了终点坐标概略测量的精度,当测站与炸点的距离约500 m时,炸点在三个方向上的测量误差均能控制在±4 m以内。
