基于现代通信网络的无人机空中管制技术*
2022-03-21唐毅王征谢志明刘肩山
唐毅 王征 谢志明 刘肩山
1.长沙航空职业技术学院;2.石家庄工程职业学院
针对无人机应用中存在的监管难的问题,研究了利用移动通信网络对无人机进行空中管制的可行性,提出了需要解决的几个关键技术难点。在文中分别对无人机测控功能、任务规划功能、故障判断处理进行和低空智能组网技术进行了研究并提出了相应的改进措施。通过本文的研究,可为无人机在城市空间安全高效的开展作业提供参考。
由于无人机具有的诸多优势,在军事、民用和科研的各个领域得到了广泛的应用。未来无人机的大规模应用将改变未来人类社会的生活模式,其在城市应用中的需求会越来越大、应用会越来越广。但是,现阶段无人机应用大部分都停留在可视范围内,难以充分发挥无人机的空间、时间以及成本优势。随着无人机在城市应用的不断拓展,越来越多的无人机将在复杂的城市空间开展作业任务,如何对城市空间的无人机进行合理和高效的管制将是未来无人机应用的关键技术和难点所在。
1 无人机空中管制现状
无人机的数据链分为上行和下行数据链路。上行数据链主要负责任务载荷命令、遥控指令、空中飞行线路的控制指令等信号的传输;下行数据链主要进行图像视频信号以及飞行状态信号的传输。
随着现代通信技术的不断发展,4G通信技术取得了重大的进步,从2010年开始,逐步在全球范围内投入商业使用,到目前,已经取得了重大的进展,基本实现了世界范围内的无缝连接,能够完成遥测遥控以及语音、图像、视频的及时传输。以此为基础,将4G甚至5G移动通信技术与无人机控制相结合,可极大的拓展无人机的应用空间。
2 无人机空中管制需要解决的几个关键技术
2.1 无人机测控功能研究
无人机系统主要分为测控与通信系统、任务设备系统、飞行器系统、发射回收系统以及指挥控制系统。测控系统主要分为地面测控系统和机载测控终端两部分,属于整个系统的核心组成部分之一,其性能好坏直接影响整个无人机系统。
目前主流无人机基本都采用专用的无人机通信数据链路。图1表示的是传统无人机测控示意图。其中地面控制站利用专用通信数据链路向无人机发送控制命令,网络时延和时延抖动很小。
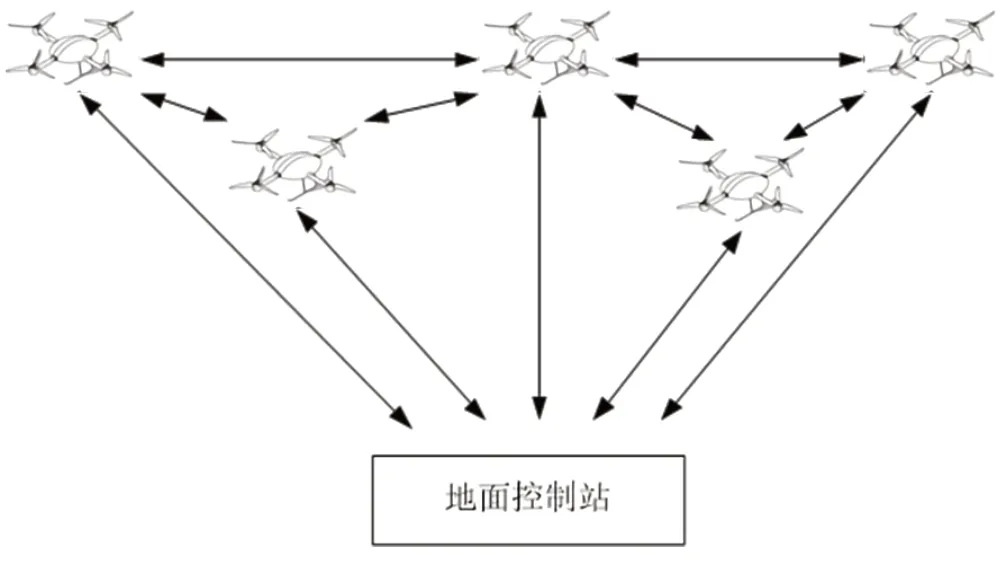
图1 传统无人机测控Fig.1 Traditional UAV MAC network
当用移动通信网络来替代专用的无人机数据链路时,控制命令要先到达移动基站再转发给无人机,会增大通信时延和抖动,给操作者造成不小的挑战。在对无人机进行测控管理时,必须要充分考虑通信网络时延这一因素。移动通信网络用来替代专用的无人机数据链路必须要解决的一个重要问题就是时延对于“人在回路”系统的影响。将移动通信网络作为通信数据链路的无人机测控图如图2所示。
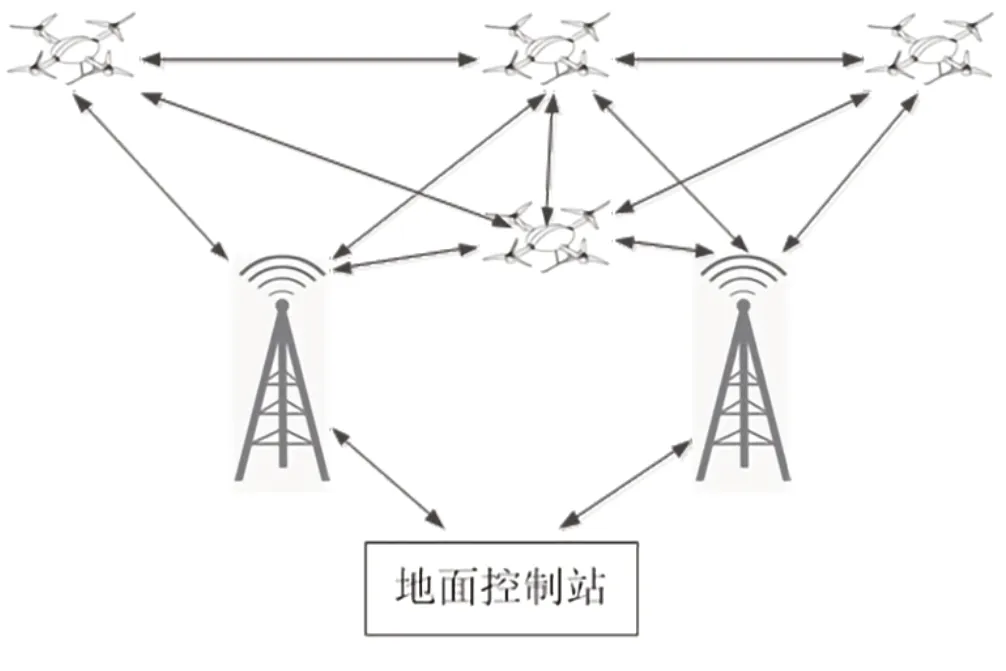
图2 基于通信网络的无人机测控Fig.2 UAV MAC based on communication
2.2 无人机任务规划功能
在对无人机进行飞行航路规划时,必须考虑各种环境因素及人为因素对无人机飞行的影响。移动网络作为通信数据链路,环境和地形所起到的干扰,以及高楼建筑对通信信号造成的阻挡和遮盖,都会导致无人机在信号薄弱区域无法接收到地面控制站的指令。同时,恶劣天气和磁场使无人机位置偏离,也会对无人机飞行任务的规划造成影响。
2.3 无人机故障判断处理
无人机在飞行时不可避免的会出现一些故障现象。这些故障轻则导致部分功能缺失,重则导致飞机坠落。如果在人群稠密区执行作业的无人机发生坠落事件,很可能会造成财产损失甚至人生安全事故。所以应该对无人机的故障进行及时判断以及采取相应的处理措施,保证无人机作业的安全性。
2.4 低空智联网组网
低空智联网是在低空空域(通常3000m以下)依托移动通信网络、低轨卫星网络及地面互联网等基础设施,构建适合低空业务运营的实体网络,是物联网技术向低空的延伸,低空智联网是发展低空飞行器行业应用最重要的基础设置,对打造数字经济新兴产业具有重要意义。在低空智联网的基础上,建立统一的低空业务运营管理架构,实现低空飞行器可观测、可规避、可控制,是构建低空管理体系的重要一环。
3 对关键技术的研究及改进措施
3.1 通信网络时延研究及改进
在4G通信网络中,端对端时延为50~100ms,且总体的波动变化幅度不大。如果采用5G通信网络,则端对端时延为5~10ms,缩短为4G的十分之一,能够实现真正意义上的实时控制。
对于4G通信链路中的传输时延问题,可以通过状态预测算法来进行相应的补偿,通过监控驾驶员的输入和无人机的相应状态,以此来预测无人机的运动,这种方法能够迅速的观察到输入量带来的影响,并以此确定下一步的操作,提高无人机的操控品质,最终使得驾驶员利用4G通信网络实现稳定可靠的超视距控制。
3.2 无人机任务规划功能研究
无人机的航线规划是指在有限时间内生成到达目标的有效航线,其中,规划出的航线必须满足可行性、安全性、低代价性、低碰撞性、可飞性等特点。针对无人机航迹规划,国内外已经有大量研究,传统经典算法中有动态规划法、导数相关法、和最优控制法,而随着人工智能的发展,大量的智能算法被应用于航迹规划并取得了显著效果,例如Dijkstra's算法、A*搜索算法、遗传算法、群体算法等。
这些研究都着重于算法本身,并未针对城市空间无人机飞行的特点进行深入分析。相比较于传统的民航航线,无人机在城市空间的航线应与城市自身的规划和布局相结合。当无人机介入城市空间当中,就相当于将平面化的城市空间领域纵向的拉伸了,将传统的二维平面空间拓展为立体的三维空间,会导致空间分布会发生一系列的变化,空间将会分为数个不同的层面。此时将城市空间分层与城市模型组合成如图3所示的无人机城市模型,就可以在保证城市空间安全的基础上实现无人机城市空间航线的合理规划。
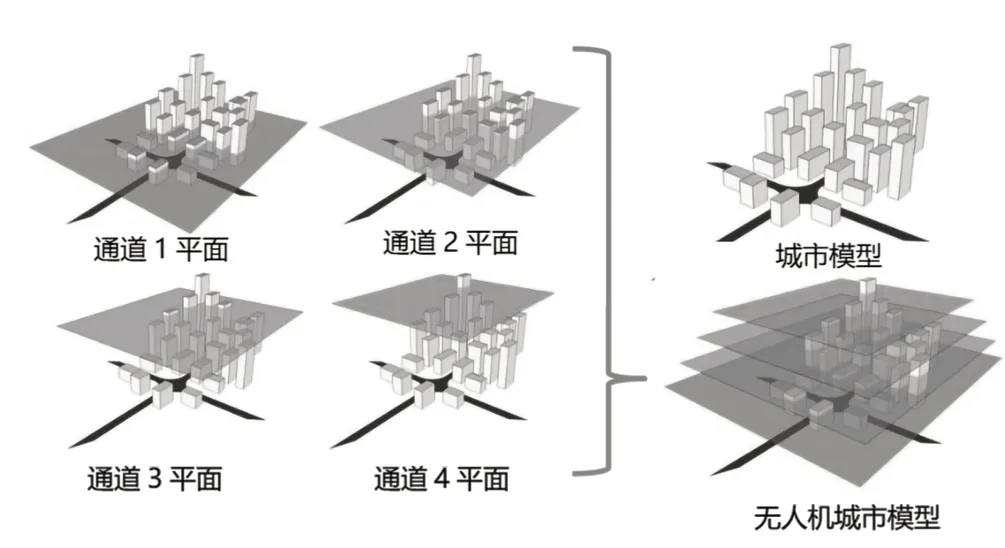
图3 无人机城市空间模型Fig.3 UAV urban space model
针对城市布局特点建立无人机城市空间模型,基于城市建筑密度将城市空间分层,其分层依据以下规则:
(1)按城市空域按高度分成多层平面。
(2)根据无人机飞行速度的快慢划分不同的使用通道。
(3)根据无人机体积大小划分不同的平面。
(4)空间内设置可供无人机起降的平台。
当无人机大规模应用到城市中时,现代城市中尚未完全利用的垂直空间将得到充分的利用,将现代社会的二维平面活动空间拓展为三维立体空间,可以极大的增强城市的承载力。如在垂直空间上规划无人机通道;利用低于24m建筑屋顶安装无人机起降平台及充电设备;在建筑立面上与结构相结合,设计无人机停靠机位;每隔一定距离安置无人机飞行监控设备等。这些对垂直空间的利用,塑造了城市垂直空间的形态,成为了城市空间的重要部分,弥补了现在城市垂直空间的空白,并且将影响以后城市的发展。比如可以将城市空间依高度划分为24m以下,24m到100m,100m以上三个空间段,用做不同的无人机飞行通道,并设置通道换飞空间节点,实现无人机有序地进行空间高度的升降。
通过对无人机任务规划的深入研究,可以根据城市具体布局规划无人机航线,解决以往无人机在城市上空黑飞、乱飞、随意飞行给城市带来的危害,为实现无人机在城市空间的安全可靠运行提供保障,在保证城市安全的基础上不断开发城市低空空域资源,利用无人机技术不断拓展和便利城市的发展。
3.3 无人机故障处理
(1)GPS故障处理。在城市空间执行作业任务时,由于城市建筑及电磁辐射等原因,容易导致GPS信号弱或者丢失GPS信号。相对GPS定位来讲,基于移动网络的无人机定位技术虽然其精度还有一定差距,但可作为一种补充定位方式。当GPS信号弱或者丢失GPS信号时,启动移动网络定位技术对无人机进行定位,可以保证无人机作业任务的顺利进行。
除了采用移动网络的定位技术,还可以采取在无人机飞控系统加载城市三维地图的形式,对无人机进行三维数字地图与GPS联合导航的模式,增强无人机在城市空间的定位能力与定位精度。
(2)迫降及坠落故障处理。无人机的故障现象是客观存在的,特别是对于在城市空间中执行作业任务的无人机,安全风险一直受到高度关注。随着无人机数量和规模的不断增加,无人机在作业过程中很可能会发生迫降甚至坠落等事故,当事故发生时,应尽可能的在确保人员及财产安全的基础上,把损失降到最低。
无人机故障的处理应与任务规划功能进行综合研究,在进行航路规划时,应综合考虑城市的建筑布局及地理特点,在航线附近提前规划出迫降场地甚至安全坠落区,以确保在发生紧急情况时能够避免人员的伤亡或造成重大财产损失。
3.4 低空智联网组网技术进展
目前部署的4G地面移动通信网,服务对象和覆盖目标是地面移动的用户,运营商进行的网规和网络工作,主要是针对地面业务进行,没有考虑也不可能考虑低空的信号覆盖,因此主要的移动通信信号能量集中在地面,低空存在的移动通信信号能量主要是天线旁瓣和后瓣的泄露信号,这些信号在低空分布杂乱无序,如果利用这些信号进行低空通信,将导致频繁掉线、切换、干扰等问题,使通信质量得不到保证。
5G网络技术由于采用Massive MIMO天线技术,天线阵子数多赋予更窄的波束及3D覆盖能力,从而支持3D动态波束赋型,可以在低空形成可靠的信号覆盖,形成地空立体网络。而且5G网络技术端到端网络切片能力,可以为无人机等低空目标提供多种可选的资源提供方式,运营商可以根据成本核算、频谱资源和低空用户的需求来合理规划端到端的通信保障方式,最大限度的满足用户的实际需求。
相比于4G地面网络,由于5G引入的3D MIMO和波束赋型能力,垂直维度的波束调整,进而通过天线阵列权值的优化,可以改善5G基站波束对空覆盖的效果,降低天线方向图上旁瓣零点和后瓣的影响。在水平方向上,由于5G Massive MIMO天线指向性的增强,也降低了低空目标和多个基站之间相互的干扰。
根据无人机的应用场景,低空智联网可以利用5G地面公网兼顾低空覆盖,ATG(Air to Ground)对空专网,以及二者的混合方式来进行组网。300m以下低空应用主要为无人机行业应用,绝大多数无人机作业在这个高度以下,需要建设对空专网进行覆盖,部分场景下也可以采用基于地面网络兼顾低空覆盖。在低空目标飞行区域选择合适的区域,以及合适站间距的设计,可在低空范围内形成有规律的覆盖能力,能够保证低空通信的正常进行。
4 结语
本文通过对基于移动通信网络的无人机空中管制技术进行研究,分析了无人机空中管制现状以及需要解决的几个关键技术。针对通信网络时延、无人机任务规划、无人机故障处理及低空智联网组网技术等方面进行了研究,为无人机未来在城市空间的大规模应用提供了参考。
