基于单线激光雷达的三维形貌重建方法研究
2022-03-18师瑞卓张小俊孙凌宇裴香丽
师瑞卓,张小俊,孙凌宇,裴香丽
(河北工业大学,天津 300130)
1 引 言
激光雷达具有测量精度高、抗干扰能力强、非接触式测量等特点,广泛应用于各个领域[1-4]。根据扫描线数的不同,激光雷达可分为单线激光雷达和多线激光雷达两种。单线激光雷达只在一个固定的扫描平面上获取距离信息,即二维扫描。多线激光雷达同时在多个扫描平面上获取距离信息,即三维扫描。多线激光雷达的应用场景更为复杂,对性能的要求更高,并且其价格昂贵,体积较大,扫描范围有限,限制了其在矿区、井下等领域的应用。相比来说,单线激光雷达具有结构简单,性价比高,体积较小等特点,研究者们已将单线激光雷达应用于诸多领域[5]。黄凤山等[6]利用单线激光雷达增加一维扫描装置的方法实现三维测量。张尧楷[7]等在构建基于二维激光扫描仪的三维重建实验系统的基础上,分析了在平动和转动这两种工作模式下的特点。Xu等[8]采用旋转多边形扫描镜的方法,实现在垂直方向上扫描物体,从而可以高精度地获得扫描场景的三维信息。北京航空航天大学的蔡京等[9]利用带轮传动实现旋转激光扫描面,设计出一套三维激光扫描系统。可见通过单线激光雷达实现低成本高质量的三维形貌重建具有重大研究意义。
基于以上考虑,本文以一个单线激光雷达为基础,使用高精度旋转云台转动扫描平面,从而实现三维扫描的功能,并对系统误差进行补偿。针对扫描得到的点云数据提出分步处理数据的系统方法,依次对点云进行去噪、平滑、精简处理,最后对处理后的数据进行三维重建。上述方法可以实现对三维场景的360°全方位扫描,并且采用激光雷达与上位计算机交互式采集数据的方式,相较于一般的数据采集方式可以获得更高的扫描速度和采样率,结构简单的同时可靠性更高,更加适合于应用在仓库、矿洞、井下等复杂工况,适用范围更加广泛。
2 三维形貌重建系统设计
2.1 系统组成
本文设计的三维形貌重建系统选用基于飞行时间测量原理的单线激光雷达,属于非接触式测量,水平测量角度360°,角度分辨率0.18°,测量范围0.1~30 m,测量精度30 mm,支持以太网通信。
图1为基于单线激光雷达的三维形貌重建系统构成示意图,该系统主要由四部分构成:单线激光雷达、扫描驱动装置、控制单元与数据采集单元。扫描驱动装置包括旋转平台、连接板和步进电机,单线激光雷达通过连接板和旋转云台固定,由步进电机驱动旋转云台转动。控制单元为一台可编程逻辑控制器(PLC),用于给步进电机发送指令,包括开始旋转,反向旋转,停止旋转等,并将步进电机的旋转状态,转动角度等信息通过串口RS-485发送给上位计算机。数据采集单元为上位计算机,数据采集由上位计算机通过串口RS-422与激光雷达通讯实现。
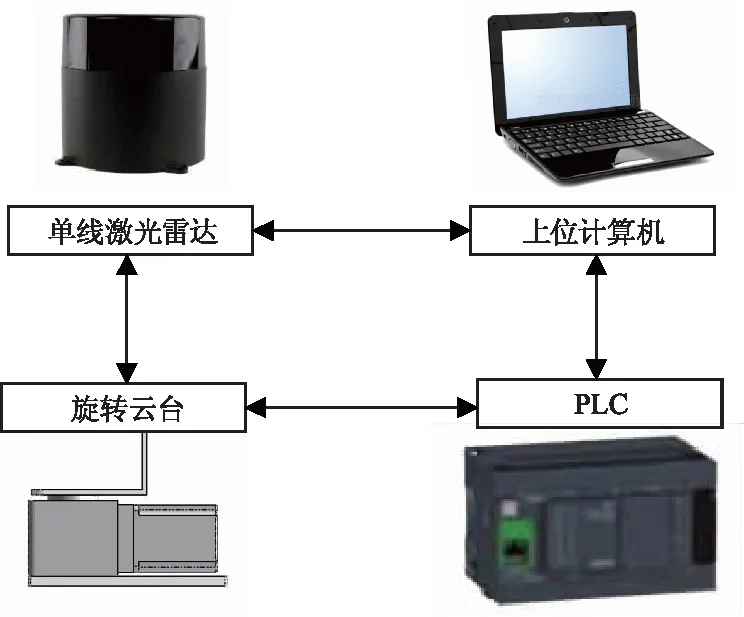
图1 三维重建系统构成示意图
该系统中的单线激光雷达通过连接板与旋转云台固定,实现旋转激光雷达扫描平面的目的,具体扫描方式如图2所示。在扫描时选取激光雷达扫描平面上0°到90°的数据,使旋转云台旋转360°,完成整个室内空间的扫描,图中扫描面ia与ib为扫描过程中的任意两个扫描面。
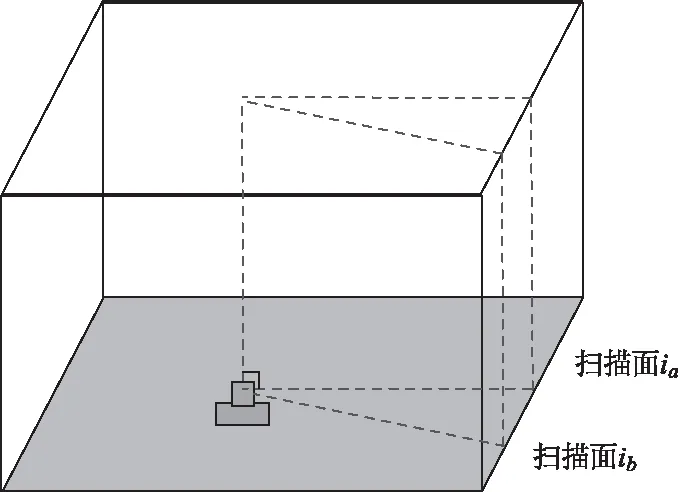
图2 扫描方式
在数据采集过程中PLC通过RS-485和上位计算机通讯。PLC接收上位计算机控制信号,接收到信号后驱动云台转动一定的角度,使雷达扫描面发生转动,转动完成后向上位计算机发送完成标志信号,实现云台旋转动作与雷达数据采集的相互配合,防止在云台旋转时采集数据,产生误差。云台转动动作完成的同时向上位机发送当前云台转角信息,经过细分后,云台转角最小可达0.045°。数据采集流程如图3 所示。
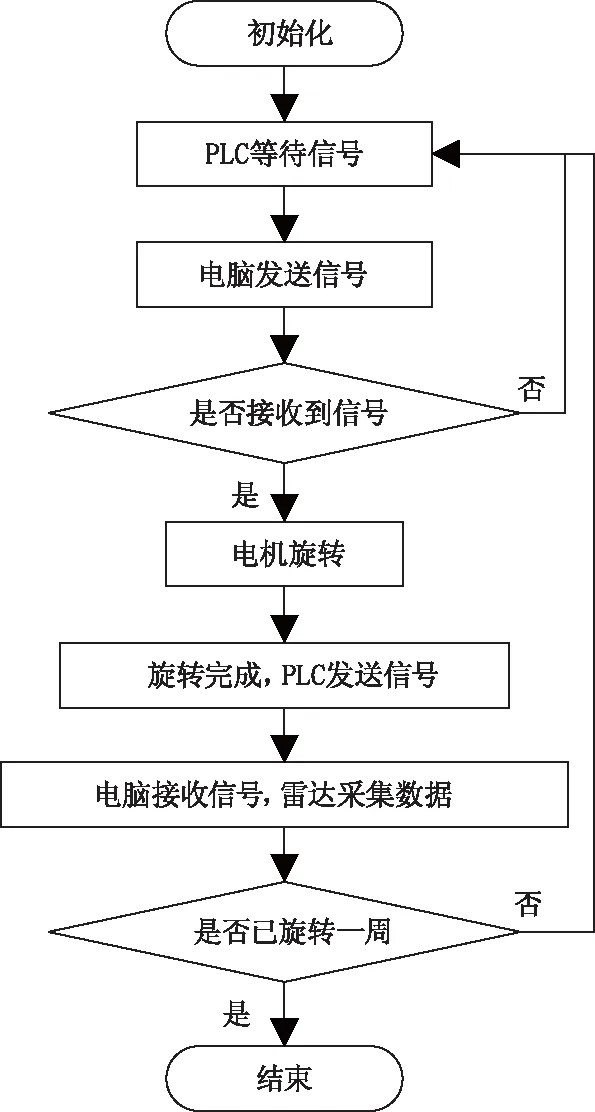
图3 数据采集流程
数据采集计算机一方面通过RS-422串口不断地获取激光雷达发送的距离数据和扫描角数据,另一方面不断接收PLC发来的云台转角数据,将三者同时存储起来,这样就获得了每帧激光雷达的数据及其扫描平面的位置。最终通过坐标转换可以获得所有数据点的空间坐标。坐标变换公式如下:

(1)
式中,ρ为激光雷达返回的距离值;α为激光雷达的扫描角;β为云台转角,(x,y,z)为该数据点的空间坐标。
空间坐标系如图4所示,以激光雷达原点为原点,以初始时刻扫描平面为XOY平面,Z轴指向竖直向上,Y轴指向激光雷达前方。

图4 空间坐标系
2.2 系统误差补偿
实际应用时如果直接采用公式(1)计算坐标可能会产生较大误差,原因主要在于激光雷达的原点并不在云台的旋转轴上,即Z轴与云台旋转轴不重合。为了降低误差,需要对系统进行误差补偿。图5为系统误差补偿原理,设旋转轴与空间坐标系XOY平面的交点为O1,激光雷达原点实际位置为O2,β为云台转角,ρ为距离值,φ为O1O2连线在初始扫描时刻与X轴的夹角,O1O2连线长度为L。
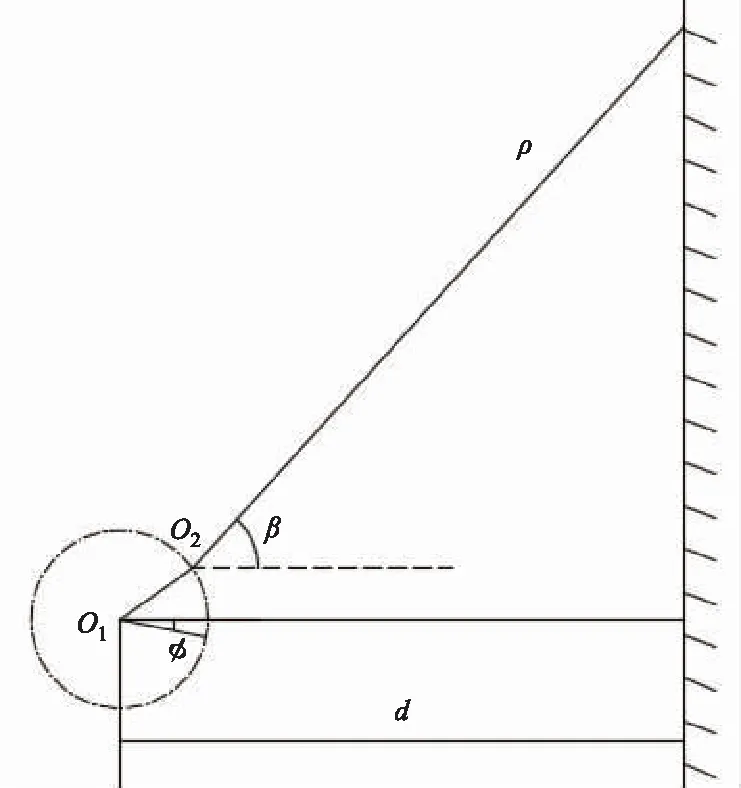
图5 误差补偿原理
将系统放置于一处平整墙面的正前方,使O1与墙面的距离为d,根据图所示关系,有如下公式:
d=ρicosβi+Lcos(βi-φ)
(2)
式中,已知d、ρi、βi已知,求L,φ。本文采用最小误差平方和的方法求解,最小误差平方和表达式为:
(3)
对(3)式求导可得:
(4)
(5)
要使E最小需要满足条件:

(6)
(7)
式(7)与式(8)组成非线性方程组,本文采用图解法进行求解,对φ∈[-30°,30°]的参数,以0.5°的间隔量化,分别用式(6)、式(7)求得对应的L值,画出两个L的图像,当两个L值的偏差最小时,则可求得L的最优解,并计算此时均方根误差:
误差补偿后坐标转换公式如下:

(8)
此时系统原点为O1点。
3 数据处理
本节以校区内一间会议室为实验场地进行三维形貌重建,利用公式(8)经过坐标转换后,可以得到整个扫描空间的原始三维点云数据,该原始点云数据密度过大,其中包含一部分随机分布的噪声数据,针对原始点云数据的这一特点,本节提出分步处理数据的系统方法。首先,数据去噪保证数据精度;其次,数据平滑改善后续建模效果;最后,数据精简提高建模速度。
由系统构成和数据采集流程可知本系统得到的原始点云数据是由一组扫描线组成的,属于典型的扫描线点云,扫描线上所有的点都位于扫描平面内,扫描平面的数量由电机转角的细分程度决定。在数据处理的去噪与平滑阶段,可以提取出每一个扫描面上的扫描线点云数据,然后对每一条扫面线的点云数据进行处理,再将处理后的扫描线点云拼接为一个整体。目前,许多学者针对点云数据的处理进行了大量的研究,主要体现在对点云数据的去噪[10-12]、平滑[13-14]、精简[15-16]等方法上。这些方法对于点云数据形成待扫描场景三维形貌的重建具有重要的意义,但也存在着数据处理过于繁琐、实用性不强等问题。本文在这些方法的基础上提出了一种适用于本系统的动态分步式数据处理方法。
观察原始点云数据(图6)可知,在激光扫描过程中,激光雷达在某一瞬间或者极短时间内会收集到一些明显偏离其他正常点云的数据,即高频噪声点,一般是由于机械振动等原因造成,这是不可避免的,针对这一类高频噪声点采用最小距离法将其去除。
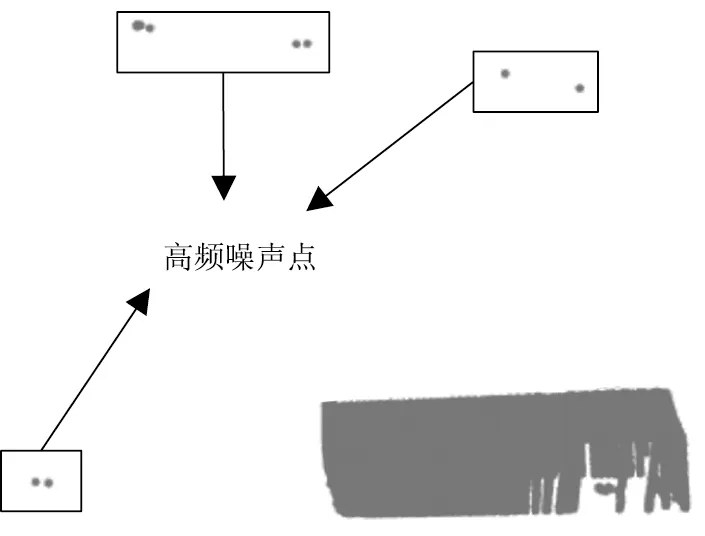
图6 原始点云数据

(9)
(10)
根据距离阈值λ,可以有效去除数据中的高频噪声点,图7为去除高频噪声点后的整体点云数据。
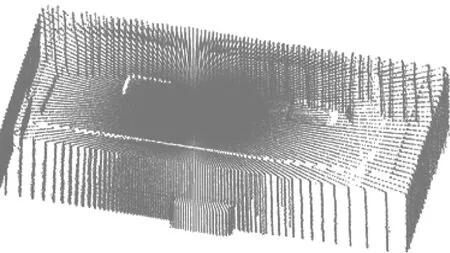
图7 去除高频噪声点的点云
从去除高频噪声后的点云数据结果(图7)可以看出最小距离法可以有效去除高频噪声点。此时,在上述处理结果的基础上取某一个扫描面(图8),显然在这个扫描面上,存在点云密度过大,低频噪声点较多的问题,因此需要对这些数据做进一步的去噪处理。

图8 去除高频噪声点的单个扫描面
通常对此类低频噪声点进行滤波处理,针对低频噪声点密集的问题,基于扫描线点云特征的考虑,进行了三维滤波方法的简化,将其转变为适用于二维扫描面的滤波方法。本文系统获得的三维点云数据是由若干个激光扫描面拼接而成的,每一个扫描面上的雷达扫描角都是0到90°,根据划分网格原理,将每个扫描面按照角度平均划分为90份,即90个区间。对每一个区间内的点云数据进行中值滤波处理,过滤低频噪声点。
滤波处理后的扫描面点云数据低频噪声点基本去除,点云密度降低(图9)。

图9 去除低频噪声点的单个扫描面
但是,滤波处理后的结果还存在少量的尖锐点,为避免这些尖锐点对后续建模质量造成影响,有必要进一步对点云数据做平滑处理以合理改变点云位置。本文采用角度偏差法实现点云平滑,针对传统角度偏差法可能导致局部区域点间距过大问题,对偏差点的处理进行优化,使角度偏差法能够更有效的保持扫描线的细节特征。如图10所示,引入偏差角度θi来判断点Pi是否为偏差点。计算出一组数据中所有的偏差角度,将其中小于90°的偏差角度取平均值,然后设定这个平均值为角度阈值γ,如果θi<γ则点Pi保留,否则点Pi为偏差点,将Pi置为其前后两点Pi-1和Pi+1的中点。
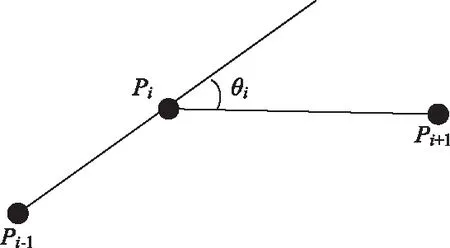
图10 角度偏差法原理
如图11所示,经过去噪、平滑处理后的点云数据在单个扫描面上,不但可以充分保持扫描线的细节特征,而且处理后的点云数据更加均匀。但是整体点云数据(图12)依然存在部分区域点云密度较大的情况,会使建模速度下降,耗费更多时间。所以有必要进一步对点云进行精简处理,使整体点云数据平均化。
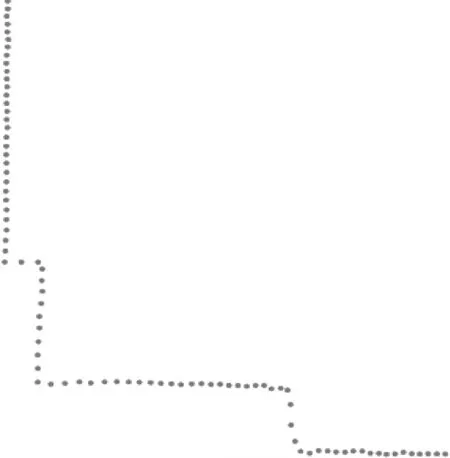
图11 平滑处理后的单个扫描面

图12 平滑处理后的点云数据
根据下采样原理对点云数据进行精简处理。根据去噪、平滑处理后的点云数据特征,对下采样方法进行改进,将点云空间划分为若干个体积相等的小立方体,保证点云数据都在立方体内,每个立方体内保留一个点云数据,将经过去噪与平滑处理后的17995个点,精简处理后得到9364个点,数据量下降了47.96 %,在保证建模精度的前提下有效提高后续三维形貌重建的运算速度。图13为精简处理后的点云数据。
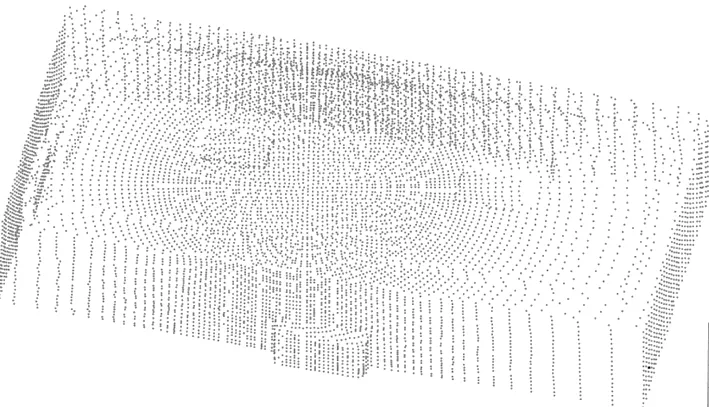
图13 精简处理后的点云数据
4 结果及分析
4.1 误差补偿结果
图14中曲线a、b为根据式(6)、式(7)得到的L曲线,图中x轴为φ,y轴为L。两条曲线交点为K,K点对应值为φ=6.03°,L=2.647 mm。此时均方根误差为3.73 mm,说明本系统所用的误差补偿方法精度较高。
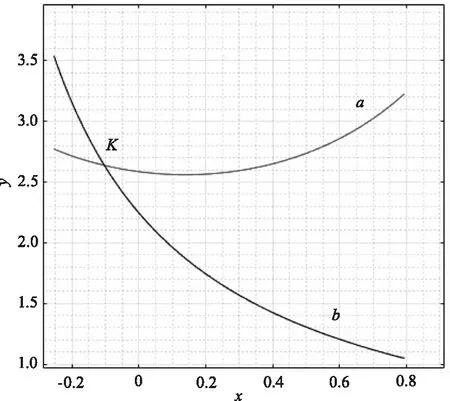
图14 误差补偿结果
4.2 三维重建结果
为最终实现物体的三维形貌重构,需要将数据处理后的物体表面点云数据用曲面描述出来。本文选用基于Voronoi 图和Delaunay 三角剖分的Crust算法来实现这一过程[17-19]。利用C语言编写Crust算法进而实现三维重建,图15为重建后的效果图,图16为顶部特征图,图17为墙壁展开特征图,图18、19为实际场景图。
图15 三维重建效果图

图16 顶部特征图

图17 墙壁展开特征图

图18 实际场景图Ⅰ

图19 实际场景图Ⅱ
将三维重建结果(图15)、顶部特征图(图16)、墙壁展开特征图(图17)与实物图(图18、19)对比可以看出,重建结果可将室内的电灯、门框、房顶、LED显示屏等物体表示出来、并且顶部特征及墙壁壁面特征也能得到很好的展现。实验结果误差分析如表1所示。其中实际长度由人工量取,实验长度是由处理后的点云数据计算得到。表中误差均由下式(11)计算得出:

表1 系统误差分析
(11)
式中,λ为相对误差;X为人工量取的实际长度;Xa为由点云数据计算得到的实验长度。
由表1可知该系统测量得到的长度值虽然存在误差,但是绝对误差不超过30 mm,在激光雷达测量误差允许范围之内,完全满足实际测量精度要求。
5 结 论
本文设计了一种基于单线激光雷达的三维形貌重建系统,并对系统的误差进行补偿,应用此系统对室内三维形貌特征数据进行采集,进而结合采集的原始点云数据,根据提出的数据处理系统方法对原始点云数依次进行降噪、平滑、和精简处理,并最终通过处理后的点云数据完成了对实际场景的三维形貌重建,重建结果与实际场景的误差不超过1.7 %,可见该三维形貌重建系统能够获取精确的三维形貌信息,并且整个系统结构简单,易于实现,建模精度高,应用场景更加广泛,提供了一种以更低成本获得更高精度三维模型的有效方法。
