基于秃鹰搜索算法的部分遮蔽条件下光伏阵列重构方法
2022-03-18王龙陈卓黄文力郭寅远李响常绪成杨博
王龙,陈卓,黄文力,郭寅远,李响,常绪成,杨博
(1.郑州航空工业管理学院,郑州市 450015;2.许昌开普检测研究院股份有限公司,河南省许昌市 461000;3.昆明理工大学电力工程学院,昆明市 650500)
0 引 言
近年来,由于能源需求的急剧增加和化石能源储量的快速减少,可再生能源的开发利用引起了更广泛的关注,并逐渐取代了大部分化石燃料。太阳能作为其中最有潜力的一种[1-2],其普及得益于其便于维护与环境友好的特点,以及光伏电池成本的逐渐下降和电力转换效率的提高[3]。最新的趋势表明,光伏组件的成本一直在稳步下降,这给新能源发电技术带来了无限的生机和活力[4]。至2020年底,风能和太阳能发电量相较于2019年增加了15%,其中光伏发电的装机容量比2019年增加了127 GW[5]。
光伏发电大规模应用于并网系统的主要障碍是在部分遮蔽条件(partial shading condition,PSC)下输出功率的剧烈波动[6-7]。当部分遮蔽是由一些动态的天气条件,如移动的云或灰尘引起时,尽管光伏阵列的初始设计是适当的,但仍不可避免地造成严重的电力损失和光伏系统的输出特性恶化[8]。在PSC下,由于旁路二极管的作用,遮蔽和未被遮蔽的组件输出特性不一致,导致光伏阵列的功率-电压(P-V)输出特性曲线上出现几个峰值,引起最大功率点跟踪(maximum power point tracking,MPPT)的误判和光伏发电效率的降低[9-10],甚至导致热斑效应进而损伤光伏板,造成严重的经济损失。
光伏组件通过串联和并联组成光伏阵列,以满足电力需求并延长其使用寿命[11]。光伏阵列的传统拓扑结构包括串并联(series parallel,SP)、网状连接(total cross tied,TCT)、桥式连接(bridge linked,BL)和蜂巢(honey comb,HC),其中SP连接是最简单和最经济的拓扑结构[12]。然而,由于辐照强度和输出电流之间存在近似正比例的关系,SP并不适用于部分遮蔽情况[13],这是因为当SP连接的组件严重失配时,光伏阵列的输出功率将急剧下降。目前,TCT拓扑具有最稳定的拓扑结构和最高的输出效率[14]。
光伏重构技术是减轻部分遮蔽影响的有效方法,可分为动态重构方法和静态重构方法。动态重构方法主要通过使用开关矩阵来动态地改变光伏阵列的电气连接,以便均匀地分散阵列上的阴影,具有布线灵活,实时性强的优点[15]。经过重构的光伏阵列可以获得最优的阴影分布,有效均衡了阵列的行电流,可以有效减少阵列输出特性的多峰,对MPPT有一定的改善效果,实现了减轻PSC影响和提高输出功率的目标。因此,研究光伏重构技术具有一定的工程价值和现实意义。
基于启发式算法的光伏重构技术在光伏重构技术中较受欢迎,因为这种方法在大规模的光伏阵列中表现良好,能够有效减少开关矩阵的切换频率。遗传算法(genetic algorithm,GA)首先被应用于光伏重构[16],它实现了阴影的均匀分布。在过去几年中,启发式算法被用来处理光伏阵列重构问题,包括引力搜索算法(gravity search algorithm,GSA)[17]、蚱蜢优化算法(grasshopper optimization algorithm,GOA)[18]、粒子群优化(particle swarm optimization,PSO)[19]、水循环算法(water cycle algorithm,WCA)[20]等。
基于上述讨论,本文提出一种基于秃鹰搜索算法(bald eagle search,BES)的光伏阵列重构方法。通过3个评价标准,即失配损耗、填充因子和功率提升百分比,对BES获得的优化结果进行评估,并与蚁群算法(ant colony optimization,ACO)[21]和禁忌搜索算法(tabu search,TS)[22]进行比较。结果证明BES的优化效果优于ACO和TS,可有效缓解部分遮蔽带来的影响。
1 光伏阵列模型
N×N的光伏TCT阵列模型如图1所示。在TCT配置中,处于同一行的组件并联连接,处于同一列的组件串联连接。
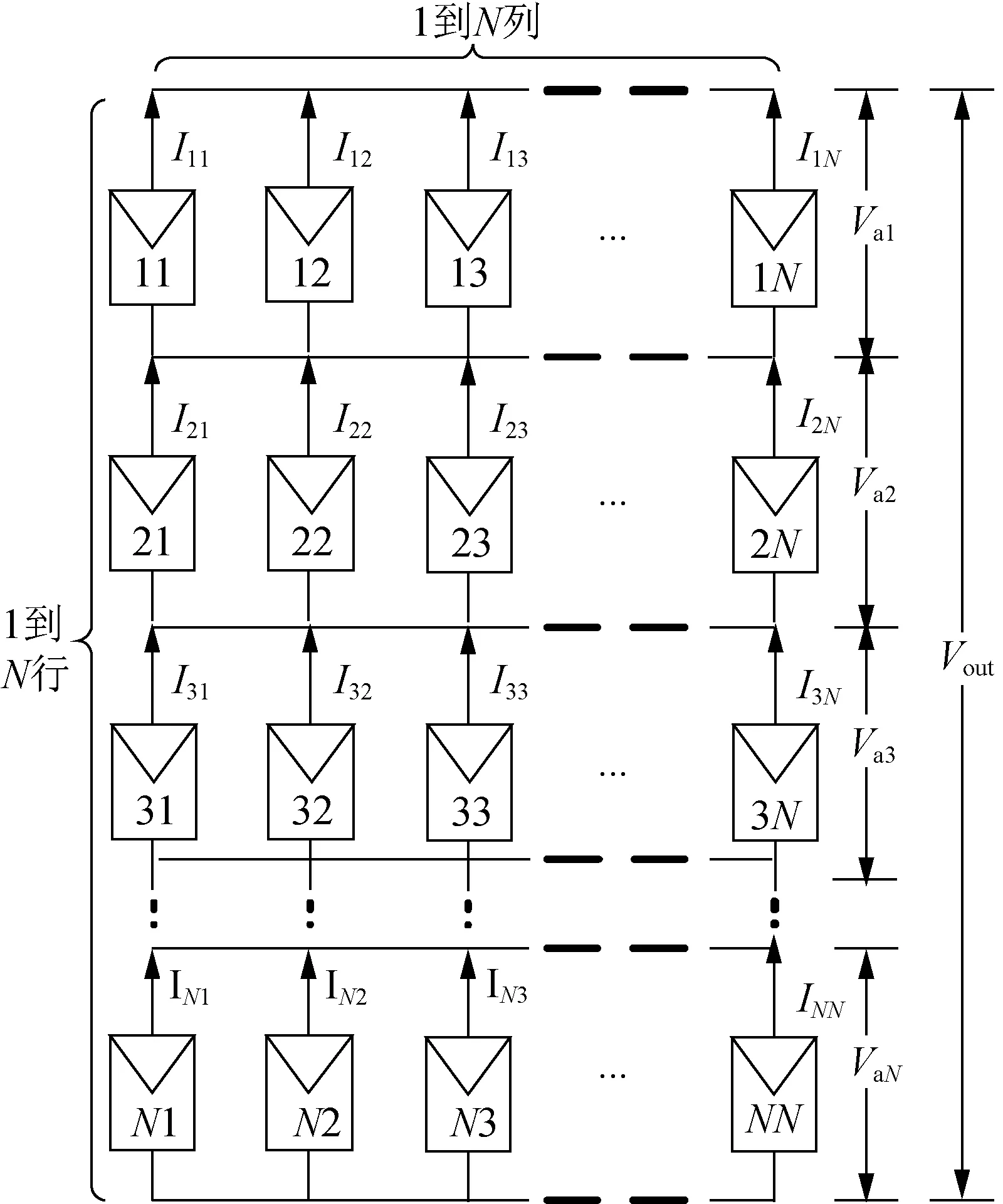
图1 N×N光伏TCT阵列模型Fig.1 N×N TCT connected array
(1)
(2)
式中:Vout为总输出电压;Vmaxh为第h行的最大输出电压;Iout为每个节点的输出电流;Ihc为第h行第c列组件的输出电流。
光伏输出特性的3个评价标准包括失配损耗、填充因子和功率提升百分比。
1)失配损耗。失配损耗PM定义为无阴影阵列和部分阴影阵列的最大输出功率之差。
PM=PGMPP(US)-PGMPP(PS)
(3)
式中:PGMPP(US)为无阴影阵列的最大输出功率;PGMPP(PS)为部分阴影阵列的最大输出功率。
2)填充因子。填充因子Ffillfactor的目的是估计部分遮蔽条件下的功率损耗,它是在阴影条件下阵列获得的最大功率与开路电压Voc和短路电流Isc的乘积之比。
(4)
式中:Vm和Im分别为阵列在最大功率点处所对应的电压和电流。
3)功率提升百分比。功率提升百分比Pen%是指重构前后的全局最大功率之差除以重构前全局最大功率的百分比。
(5)
式中:Pmpp,re和Pmpp,TCT分别为重构后和重构前的阵列输出全局最大功率。
2 基于BES的光伏重构方法
2.1 秃鹰搜索算法
BES是由H.A.Alsattar于2020年提出的一种新型启发式算法[23],其主要原理是模拟秃鹰寻找食物的行为,具有较强的全局搜索能力。该算法可分为3个部分,即选择搜索空间、在选定搜索空间内搜索和俯冲。在第一阶段,秃鹰选择猎物最多的空间;在第二阶段,秃鹰在选定的空间内移动以搜索猎物;在第三阶段,秃鹰从第二阶段确定的最佳位置摆动,确定最佳狩猎点并俯冲。BES的3个阶段如图2所示。

图2 秃鹰搜索算法的3个阶段Fig.2 Three optimization steps of BES
在基于秃鹰搜索算法的光伏阵列重构方法中,一只秃鹰个体代表一个光伏阵列,个体的位置即光伏阵列的电气排列情况,目标函数为阵列输出功率的最大化。算法首先收集光伏阵列的电气参数(如辐照、温度等),再根据自身机制动态地改变阵列的电气连接直至算法收敛,输出光伏阵列的电气排列最优配置。开关矩阵根据算法输出的最优配置改变组件间的电气连接,从而实现了光伏重构。图3为一种由单刀多掷开关构成的开关矩阵示意图[18,24]。
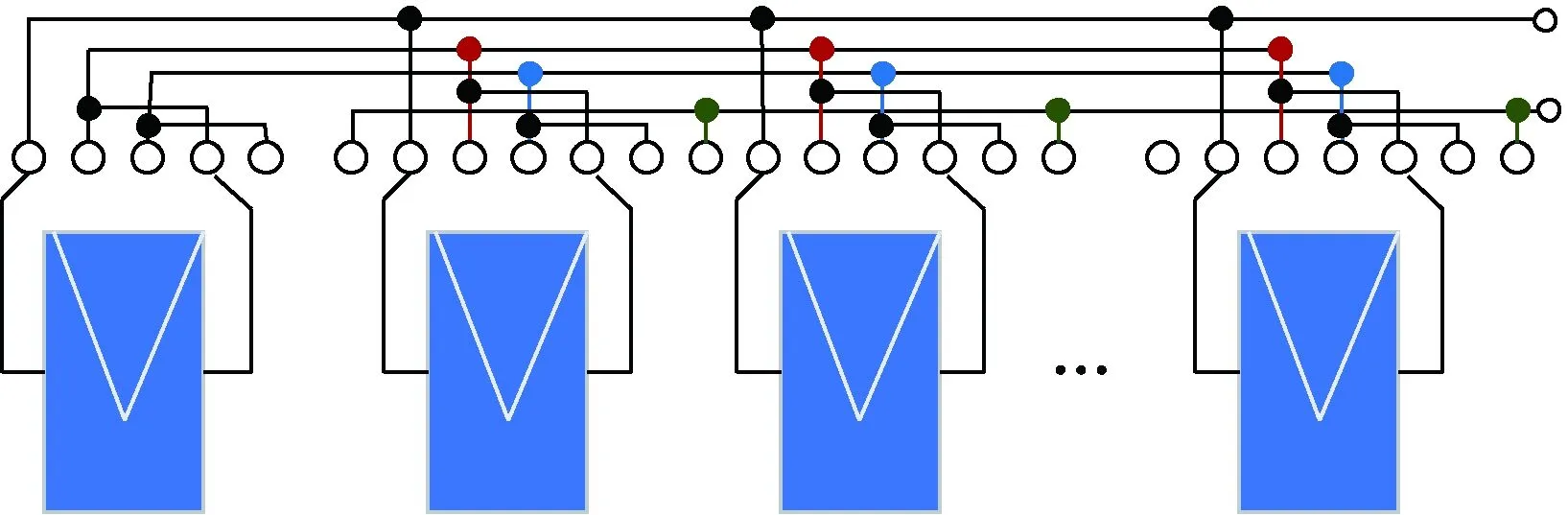
图3 开关矩阵的结构Fig.3 Structure of a switching matrix
BES的3个阶段详细分析如下:
1)选择阶段。在选择阶段,秃鹰在选定的搜索空间内确定并选择最佳区域(根据食物量),并在此捕食。
Pnewi=Pbest+α·r(Pmean-Pi)
(6)
式中:Pnewi为第i只秃鹰更新后的位置;α是用于控制秃鹰位置变化的参数,其值介于1.5与2之间;r是介于0和1之间的随机数;Pbest表示秃鹰当前根据先前搜索中确定的最佳位置选择的搜索空间;Pmean为前一搜索结束后的秃鹰平均位置;Pi为第i只秃鹰更新前的位置。
2)搜索阶段。在搜索阶段,秃鹰在选定的搜索空间内搜索猎物,并在螺旋空间内向不同方向移动以加速搜索。俯冲的最佳位置由式(7)表示。
Pnewi=Pi+y(i)·(Pi-Pi+1)+x(i)·(Pi-Pmean)
(7)
(8)
(9)
θ(i)=a·π·rand
(10)
r(i)=θ(i)+R·rand
(11)
式中:a与R代表螺旋形状变化的参数;a是介于5到10之间的参数,用于确定中心点的点间搜索角;R取值在0.5到2之间,用于确定搜索周期的数量;rand为(0,1)之间的随机数;x(i)和y(i)表示极坐标中秃鹰的位置,取值均为(-1,1)。
3)俯冲阶段。在俯冲阶段,秃鹰从搜索空间的最佳位置摆动到目标猎物,所有的点也向最佳点移动。
Pnewi=rand·Pbest+x1(i)·(Pi-c1·Pmean)+
y1(i)·(Pi-c2·Pbest)
(12)
(13)
(14)
θ(i)=a·π·rand
(15)
r(i)=θ(i)
(16)
式中:c1和c2均为介于1和2之间的参数。
2.2 基于秃鹰搜索算法的重构方法
2.2.1 目标函数
为了减少部分遮蔽造成的影响,采用重构的方式来均衡每一列的辐照度,并通过式(17)最大化输出功率。
(17)
式中:Pmax为输出功率最大值;Ih和Vh分别为第h行的电压和电流。
2.2.2 约束条件
光伏重构中,每个组件仅与同一列中的另一个组件交换其行。因此,由电气开关状态构成的重构变量应满足以下约束条件:
(18)
式中:xhc表示第h行第c列的电气开关状态。
2.3 执行过程
BES用于光伏重构的流程如图4所示,BES用于光伏重构的伪码如表1所示。

图4 秃鹰搜索算法用于光伏重构的流程图Fig.4 Flowchart of BES for PV reconfiguration

表1 秃鹰搜索算法用于光伏重构的伪码Table 1 Pseudo code of BES for PV reconfiguration
3 算例分析
在本节中,通过模拟缓慢移动的云在10×10光伏阵列上造成的阴影在10 min内的变化来评估BES的重构性能。同时,将BES与ACO和TS进行比较。为了公平兼顾每个算法,将最大迭代次数tmax和种群规模分别设置为200和25。光伏组件型号为A10 Green Technology A10J-M60-225,其主要参数如表2所示。

表2 光伏组件的主要参数Table 2 Main parameters of PV module
光伏阵列的初始辐照度分布如图5所示,图中不同的颜色代表不同的辐照度,组件上的数字分别为组件所代表的行号和列号,这体现了组件的电气连接顺序。

图5 缓慢移动的云阴影的辐照分布Fig.5 Irradiation distribution of slowly moving clouds
图6为缓慢移动云层阴影下光伏阵列重构后的电流-电压(I-V)曲线和P-V曲线。由图6可以看出,随着被遮蔽组件的增多,阵列的输出功率逐渐减少,被BES重构的光伏阵列特性曲线变得平滑,且基本只有一个峰值。

图6 光伏重构后的I-V曲线和P-V曲线Fig.6 I-V curves and P-V curves with PV reconfiguration
图7为第5分钟重构前后的I-V曲线和P-V曲线。由图7可以看出,重构前光伏阵列的曲线有4个峰值,最大输出功率在17 kW左右,而重构后变为单峰曲线,最大输出功率显著增加(20 kW左右),且BES可以获得比ACO、TS更高的输出功率。可以预计,当BES应用到大规模光伏电站中时,可以获得比其他算法更高的经济效益。

图7 光伏重构前后第5 min的I-V曲线和P-V曲线Fig.7 I-V curves and P-V curves at the 5th minute with and without PV reconfiguration
重构后的阵列辐照分布如图8所示。值得注意的是,本文所使用的重构方法是针对TCT配置的光伏阵列设计的,在同一列中,经过光伏重构的组件通过开关矩阵的切换改变了其电气连接情况,在图8所示的光伏阵列示意图中体现为行号的变化以及同一列中代表辐照度的色块的均匀分散。由图8可以看出,通过BES重构,同一列的阴影被均匀分散到了不同的行,显示出较好的重构效果。

图8 光伏重构后的光伏阵列最优辐照分布Fig.8 The optimal irradiation distribution of reconfigured PV array
BES、ACO和TS在30次独立运行中的阵列最大输出功率Pm、阵列平均输出功率Pav和标准差如表3所示。BES、ACO和TS单次运行运算时间分别为4.25、1.58、0.61 s。
由表3可以看出,BES的标准差低于TS,表明BES具有较强的稳定性;同时,BES获得的最大输出功率均高于ACO和TS,表明BES的寻优能力较强,不易陷入局部最优。

表3 BES、ACO和TS在30次独立运行中的阵列最大输出功率、阵列平均输出功率和标准差Table 3 The maximum output power,average output power and standard deviation of PV array obtained by BES,ACO and TS in 30 independent runs
总计失配损耗PM、平均功率提升百分比Pen%和平均填充因子Ffillfactor如图9所示。由图9可以看出,BES获得最大输出功率的总计失配损耗为18.671 kW,相较于TCT、ACO和TS分别减少了57.90%,2.37%和3.51%;BES获得最大输出功率的功率提升百分比为15.10%,而ACO和TS分别为14.83%和14.68%,均低于BES;BES获得的填充因子分别为0.714 3和0.708 2。可见,BES的全局搜索能力较强,能获得高质量的重构结果。

图9 TCT、BES、ACO和TS的失配损耗、功率提升百分比和填充因子Fig.9 Mismatch loss,power enhancement and filling factor of TCT,BES,ACO,and TS
4 硬件在环实验
使用MATLAB和RTLAB平台进行硬件在环实验,试验环境如图10所示。仿真中使用的解法器是ode23,采样时间为0.01 s。

图10 基于RTLAB平台的实时硬件在环实验Fig.10 The RTLAB platform-based real-time hardware-in-loop experiment
实验获得的仿真结果如图11和12所示,图中G代表辐照度,Tc代表温度。可以看出,从RTLAB和MATLAB平台获得的光伏阵列输出特性曲线基本吻合。因此,所提方法较为可靠,具有一定的工程可行性。
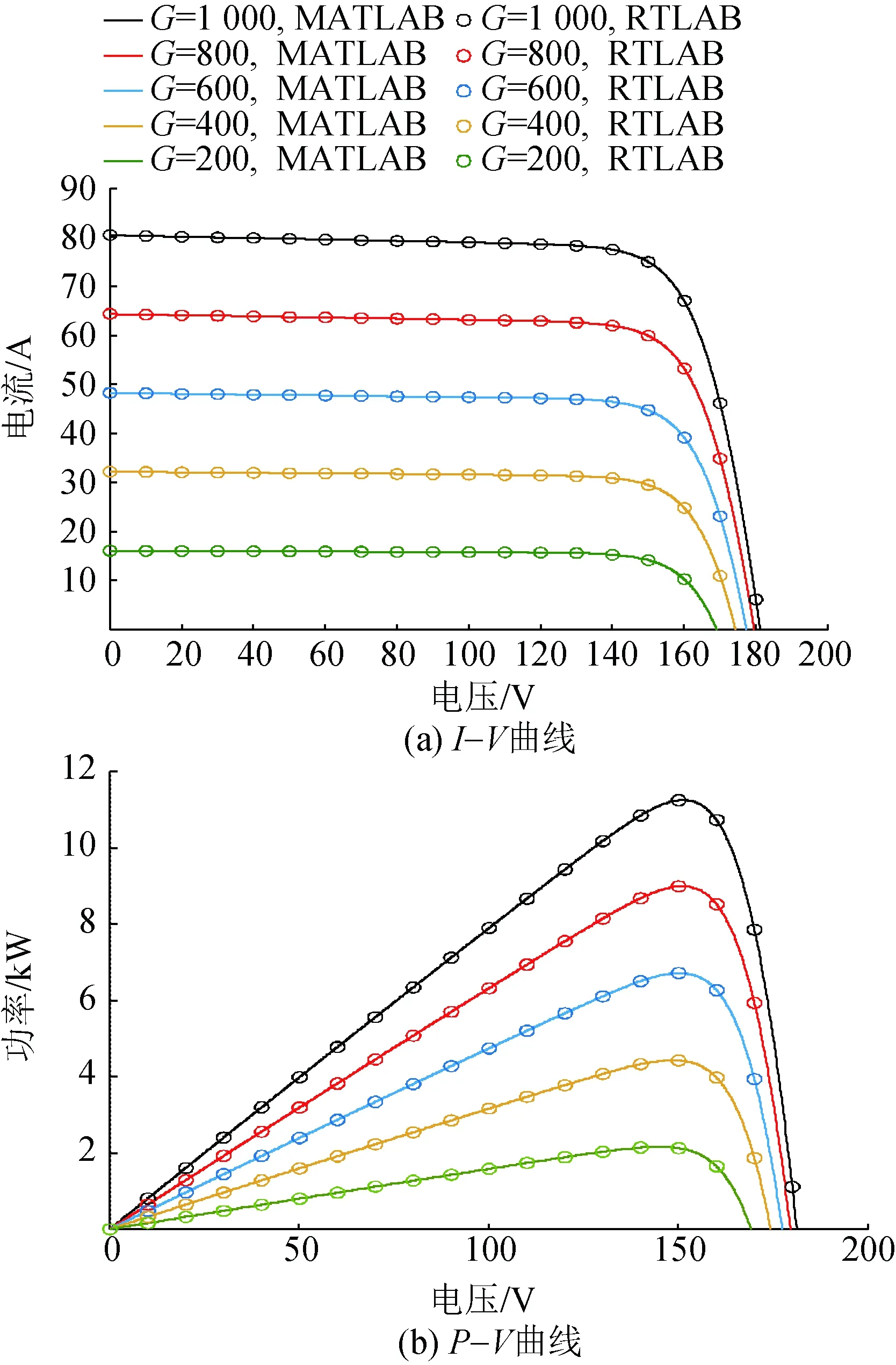
图11 温度恒为25 ℃时光伏阵列在不同辐照下的输出特性曲线Fig.11 Output characteristics curves of PV array under different irradiances when temperature is constant at 25℃
目前绝大多数的以光伏重构为主题的研究论文都是以模拟仿真为主要思路的[25-26],已经陆续有研究人员做出光伏重构的实物实验,因此光伏重构技术的可行性是可以保证的[27]。
5 结 论
本文提出了一种基于秃鹰搜索算法的光伏阵列重构方法来减轻部分遮蔽的影响。秃鹰优化算法具有较强的全局搜索能力,不易于陷入局部最优,可以很好地重构光伏阵列。
1)与传统的TCT配置相比,BES、ACO和TS在缓慢移动的云造成的阴影下分别可以提高15.1%、14.83%和14.68%的输出功率,减少57.90%、56.88%和56.31%的失配损耗,提高14.21%、13.96%和13.85%的填充因子,重构后的P-V曲线为单峰曲线。与ACO与TS相比,BES提高了2.37%和3.51%的输出功率,有效地缓解了部分遮蔽带来的影响,具有实用的工程价值。

图12 辐照恒为1 000 W/m2时光伏阵列在不同温度下的输出特性曲线Fig.12 Output characteristics curves of PV array under different temperatures when irradiance is constant at 1 000 W/m2
2)BES在30次独立运行中的输出功率标准差低于ACO和TS,这说明BES的稳定性更高。而TS最不稳定。
3)BES、ACO和TS单次运行时间分别为1.58、4.25和0.61 s,可见BES的运行速度较快,次于TS,但远远优于ACO。
在以后的研究工作中,将会改进基于BES的光伏重构方法,并将BES应用于大型光伏电站中。
