基于HHC的旋翼噪声主动控制风洞试验研究
2022-03-18张羽霓孙朋朋陈卫星
张羽霓,赵 俊,樊 枫,孙朋朋,陈卫星
(中国直升机设计研究所 直升机旋翼动力学重点实验室,江西 景德镇 333001)
0 引言
直升机的噪声水平高,会使军用直升机在战场过早地暴露,降低作战的奇袭性和战场生存能力;同时低空飞行的民用直升机会给城市环境带来严重的噪声污染。因此,围绕直升机的主要噪声源——旋翼开展噪声控制技术研究具有重要意义。
为了实现直升机旋翼的降噪,国内外开展了一系列噪声主/被动控制技术研究。其中,基于高阶谐波控制(HHC)实现旋翼噪声主动控制的控制原理是通过安装在自动倾斜器下方的高频液压作动装置,在旋翼桨叶总距(零阶)和周期变距(一阶)控制的基础上,施加高阶谐波控制,改变旋翼桨叶的运动规律以及高阶气动载荷分布和变化规律,从而改变旋翼噪声特性,达到噪声控制的效果。
国外针对基于HHC的旋翼噪声主动控制技术开展了大量的研究工作。1986年,Hardin和Lamkin通过对建立的旋翼桨-涡干扰噪声参数影响模型进行分析,指出HHC在旋翼噪声主动控制方面的潜力。1994年,NASA Langley研究中心和德国宇航局(DLR)开展了风洞试验验证,结果表明在斜下降状态下,适当的HHC控制可以降低5~6 dB的旋翼BVI噪声。2001年美国NASA、德国DLR、法国宇航中心(ONERA)对BO-105桨叶模型进行的HARTⅡ试验表明,HHC通过高阶桨距作用使得桨-涡干扰位置从桨尖向桨根移动,导致了BVI噪声辐射的降低。2015年,德国宇航中心(DLR)完成了基于多自动倾斜器的主动控制风洞试验,结果表明对于BO-105桨叶模型,二阶控制状态下可降低4%功率需求、三阶控制状态下可降低4.5 dB桨-涡干扰噪声。目前,在旋翼噪声主动控制研究方面国内尚处于起步阶段。南京航空航天大学针对HHC开展了一些理论建模研究和控制算法研究,而针对基于HHC的噪声主动控制的风洞试验尚未开展过;中国直升机设计研究所针对基于后缘襟翼控制的旋翼振动主动控制技术开展了一些原理性探索研究和试验验证。
基于此,本文开展了基于HHC的旋翼噪声主动控制风洞试验,得到了有/无主动控制旋翼在悬停、平飞以及斜下降状态下的气动噪声特性,以及施加不同振幅、相位的高阶谐波控制对噪声水平的影响规律,探索了建立的基于HHC的旋翼噪声主动控制系统的噪声控制效果。
1 试验设备及流程
试验在中国直升机设计研究所8 m×6 m开口式风洞中进行,模型旋翼桨叶安装在旋翼试验台上,气动噪声采用自由场传声器测量。本试验中旋翼转速为702 RPM,高阶谐波控制的频率为23.4 Hz(2)。
1.1 试验模型及设备
模型旋翼桨叶的桨尖形状为矩形,桨叶由OA3系列单一翼型配置,有翼型的起始位置为0.26。旋翼模型桨叶如图1所示。该模型旋翼的基本参数见表1。

图1 旋翼模型桨叶

表1 模型旋翼基本参数
试验设备包括风洞、旋翼试验台、高频液压作动器和测量系统。测量系统包括天平测力系统和自由场传声器阵列。试验时还配备了监视报警系统和振动监视系统,实时关注旋翼模型及台体的运行情况,确保试验设备以及模型的安全。试验整体情况如图2所示。

图2 风洞试验整体情况
试验中,利用安装在自动倾斜器下方的高频液压作动器实现对旋翼桨叶桨距的主动控制。装有高频液压作动器的旋翼试验台如图3所示。高频液压作动器基本参数见表2。HHC的工作原理是将预设的旋翼总距和周期变距操纵信号输入到计算机,经由控制算法计算得到作动器的位移时间历程,作动器输入经由不动环—动环—变距拉杆,传递到桨根,最终转化为旋转系下桨叶的预期变距运动,改变桨叶气流环境,达到降低旋翼系统振动载荷和降噪的目的。本试验为正弦谐波的单阶输入,采用以下方式确定:

表2 高频液压作动器基本参数
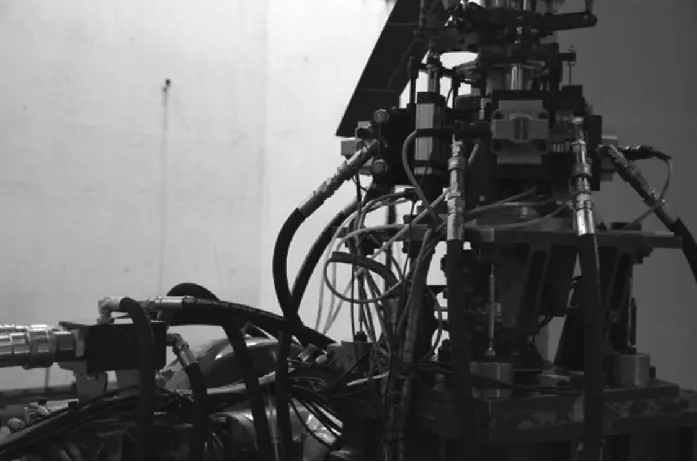
图3 装有高频液压作动器的旋翼试验台
=*cos[(*)-]
(1)
其中,为激励振幅,代表阶旋翼谐波输入,为旋翼方位角,为激励相位对应的最大幅值。
在传声器布置方面,开展旋翼噪声主动控制前飞试验时,为保障安全并尽量减少支架对声阵列的干扰,选择在90°、130°两个方位(如图4中实心圆点)放置传声器支架。综合考虑传声器支架必须在风场外以及减弱声反射影响等因素,传声器支架采用分节弧形支架安装方式。弧形支架半径为4.0(即支架弧形杆距桨毂中心约8 m),弧度范围为30°~100°,间隔10°放置传声器,如图5所示。悬停试验在风洞大厅展开,选择在140°、230°方位布置传感器支架,传声器支架弧形半径为3.0,角度范围为60°~100°。

图4 噪声传感器支架位置示意图(俯视)
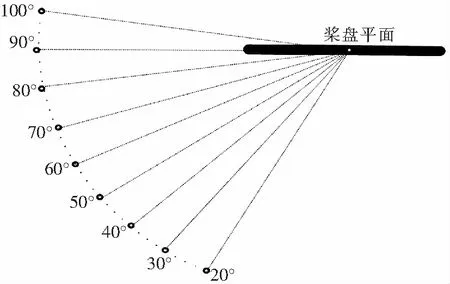
图5 噪声传感器支架弧度角示意图(平视)
1.2 试验流程及试验状态
基于HHC的旋翼噪声主动控制试验首先对旋翼进行配平操纵,在无主动控制情况下获得给定前进比和轨迹角下的总距、横纵向周期变距等操纵量;进行主动桨距控制试验时,在原有操纵量基础上施加激励控制实现给定幅值、频率、相位的高阶谐波控制。采用专用的传声器阵列获得旋翼在各种状态下有/无主动控制的气动噪声特性数据,得到旋翼噪声水平随主动控制输入的变化关系,探索建立的基于HHC的旋翼噪声主动控制系统的噪声控制效果。试验状态见表3。
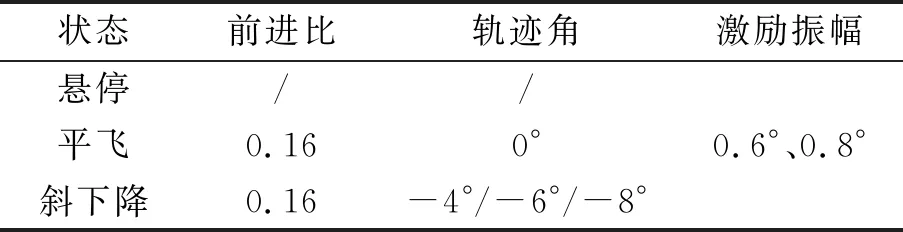
表3 试验状态
2 试验结果与分析
首先给出了旋翼性能和噪声的重复性试验对比情况,验证了试验结果的有效性;接着给出了悬停、平飞、斜下降状态下,不同激励振幅以及激励相位对旋翼噪声的影响曲线。当激励相位为某一数值时,噪声声压级最小,定义此相位为最优噪声控制相位。对此状态下该测点有无激励的声压时间历程和频域对比情况进行了初步的分析。
由于建立的基于HHC的旋翼噪声主动控制系统主要关注的旋转噪声和BVI噪声集中在旋翼旋转频率及其倍频上,宽带噪声占比较小,并且试验环境为非声学测试环境,故本文将采集到的多个周期噪声数据平均到一个周期内,由声压的时间历程求得平均处理后的声压级。
2.1 重复性对比验证
图6为悬停总距扫描试验(总距6.6°~13.6°)的旋翼功率系数随拉力系数变化曲线的重复性对比。从图中可以看出悬停总距扫描试验的数据重复性良好。图7为斜下降状态下两次配平试验的旋翼拉力时间历程曲线。从图中可以看出相同状态下前后两次的试验结果曲线吻合度较高,表明本次试验状态稳定,测量数据重复性良好,试验数据较可靠。

图6 旋翼功率系数随拉力系数变化曲线(悬停状态)

图7 旋翼拉力的时间历程(斜下降状态)
图8为斜下降状态不同测点噪声声压级测量重复性结果,对采集的噪声结果进行了平均处理,纵坐标为平均后声压级。从图中可以看出,在同一状态下同一噪声测点的数据重复性较好,表明各传声器状态良好,噪声测量结果可靠。

图8 斜下降状态(μ=0.16,轨迹角-4°)噪声声压级随弧度角变化曲线(方位角90°)
2.2 激励振幅对旋翼噪声的影响
从图9中可以看出,悬停试验状态对自动倾斜器不旋转环施加总距13.6°、激励频率23.4 Hz(2)、振幅0.6°和0.8°的不同相位的主动控制后,相对于无激励状态(图中三角标记直线,下同),各传声器位置处的噪声频谱声压级都有明显的变化。

图9 悬停状态不同激励幅值噪声声压级随相位变化曲线(方位角230°,支架弧度角100°)
对于激励幅值0.8°的主动控制输入,激励相位在150°附近时,方位角230°、弧度角100°的传声器测得的噪声声压级相对较低,150°为其最优控制相位,声压级最多降低4 dB。激励振幅0.6°的主动控制输入与振幅0.8°的声压级变化趋势一致,最优控制相位也相同。两种激励声压级均在90°~200°控制相位区间内有所降低,说明激励幅值的变化对最优激励相位的影响不大。在该状态下,对比两种激励幅值,随着激励幅值的增大,激励产生的影响增大,某些激励相位范围的噪声水平增加,最优相位所产生的降噪效果更加明显。
图10中的(a)、(b)分别给出了前进比均为0.16的平飞状态和斜下降状态(轨迹角-6°),施加振幅为0.6°和0.8°的不同相位的主动控制激励后,不同测点的噪声声压级变化曲线。其中,平飞状态在两种幅值的主动控制输入下,在方位角90°,弧度角90°位置处最优控制相位在激励相位225°附近,声压级最多降低1.7 dB,在激励相位150°~280°区间内实现噪声控制效果。斜下降状态在方位角130°,弧度角70°位置处最优控制相位在激励相位310°附近,声压级最多降低1.2 dB,有效降噪激励相位区间为210°~360°。与图9结论不同的是,在平飞和斜下降状态下,均随着激励幅值的增大,旋翼噪声水平反而有所增加,其最优相位所产生的降噪效果也减弱。由此可得出,激励幅值增大对于旋翼噪声控制未必一定有利,不同幅值的噪声控制效果也与旋翼状态有关。

图10 不同激励幅值噪声声压级随相位变化曲线
2.3 激励相位对旋翼噪声的影响
从图11可以看出,悬停状态下,对自动倾斜器不旋转环施加激励振幅为0.8°的不同相位的主动控制后,相对于无激励状态,各激励相位下的噪声声压级有明显的变化。对于方位角230°,弧度角100°测点,在激励相位0°~100°以及220°~360°控制区间内,噪声相比于无激励状态增加;激励相位100°~220°区间内,噪声降低,在控制相位166°时噪声控制效果最优,测点声压级降低量达到了4.4 dB。
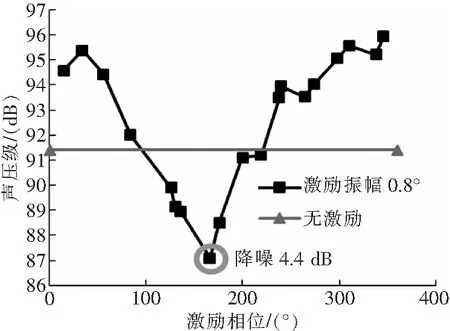
图11 悬停状态有无激励噪声对比(方位角230°,弧度角100°)
对此状态下最优控制相位166°有/无主动控制的声压时间历程以及频域对比情况进行初步的分析。从图12、图13可以看出,施加主动控制后,该测点处施加主动控制前后声压随时间历程的变化趋势一致,噪声声压的负峰值明显降低,从-1.0 Pa降低到-0.5 Pa,噪声声压级减小;频谱中能量较大的主要低阶成分均有不同程度的降低,其中1阶成分(与高阶谐波控制的基频11.7 Hz不同,此处基频为23.4 Hz)降低较大,该测点处噪声1阶成分降低达11.09 dB。
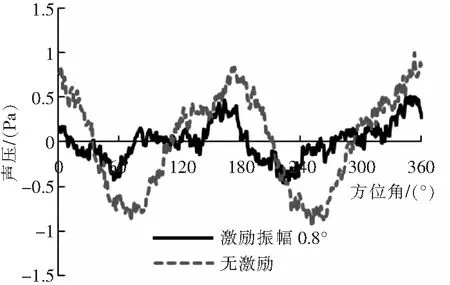
图12 悬停有无激励的声压时间历程对比
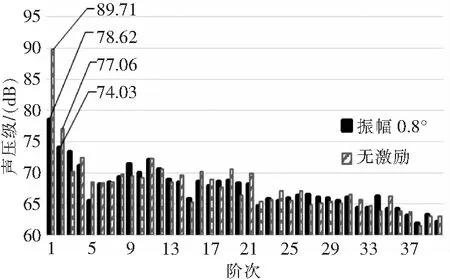
图13 悬停有无激励的声压频域对比
图14和图15分别给出了前进比0.16的平飞状态下,施加激励振幅0.8°与振幅0.6°的主动控制,方位角90°,弧度角30°测点与方位角130°,弧度角30°测点处有/无主动控制各激励相位下的噪声声压级对比情况。对于图14中测点,在控制相位225°时声压级降低3.3 dB;最优控制相位为346°,声压级降低量达到了3.8 dB;有效降噪激励相位区间为0°~50°和170°~360°。对于图15中测点,声压级在250°最优控制相位下降低3.1 dB。

图14 平飞状态(μ=0.16)有无激励噪声对比(方位角90°,弧度角30°)

图15 平飞状态(μ=0.16)有无激励噪声对比(方位角130°,弧度角30°)
图16给出了斜下降状态下(=0.16,轨迹角-6°),噪声监测点(方位角90°,支架夹角40°)处噪声声压级随高阶谐波控制的激励相位的变化曲线。最优控制相位为262°,噪声降低量为1.1 dB。图17为斜下降轨迹角-4°状态,噪声监测点(方位角130°,支架夹角70°)的最优控制相位为259°,噪声降低量为1.3 dB。

图16 斜下降状态(μ=0.16,轨迹角-6°)有无激励噪声对比(方位角90°,弧度角40°)
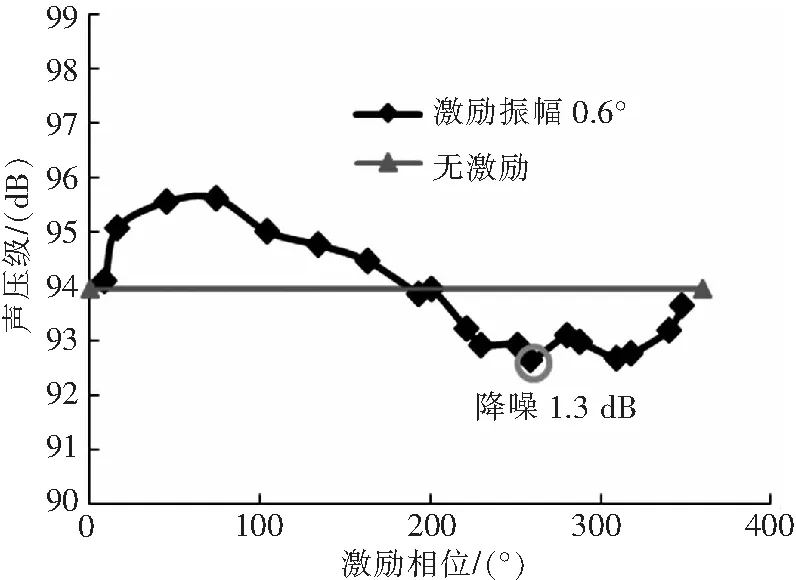
图17 斜下降状态(μ=0.16,轨迹角-4°)有无激励噪声对比(方位角130°,弧度角70°)
3 结论
本文基于构建的基于HHC的旋翼噪声主动控制系统及旋翼噪声测量系统,在中国直升机设计研究所8 m×6 m开口式风洞开展了不同飞行状态下的旋翼噪声主动控制风洞试验。试验通过施加不同幅值、相位的高阶谐波控制,探索了旋翼悬停、平飞和斜下降等典型状态下施加主动控制的降噪效果,主要得到了以下结论:
1)本文构建的基于HHC的旋翼噪声主动控制系统对悬停、平飞以及斜下降三种状态均实现了有效降噪。通过对比有/无主动控制的旋翼噪声可以得出:在悬停、平飞以及斜下降典型状态下分别能实现最大降噪4.4 dB、3.8 dB、1.3 dB。
2)通过改变主动控制系统的激励振幅和相位,获得了不同主动控制参数对旋翼噪声的影响特性。其中,激励振幅的增大对于旋翼噪声控制未必一定有利,不同幅值的噪声控制效果也与旋翼状态有关;不同的激励相位对旋翼降噪效果影响不同,对于本文的装有高频液压作动器的旋翼主动控制系统来说,合理的激励相位设置尤为重要。
3)施加2谐波控制,主要是使得旋翼噪声的低阶成分降低,引起噪声声压级下降,从而实现对旋翼噪声的主动控制。
