传感器附加质量对直升机桨叶模态试验的影响
2022-03-18王宇奇任航航
周 桓,王宇奇;任航航
(1.中国直升机设计研究所,江西 景德镇 333001;2.西安远航真空钎焊技术有限公司,陕西 西安 710021)
0 引言
直升机与普通的固定翼飞机最大的区别就是直升机具有独特的旋翼系统。作为直升机垂直起降和前飞的关键,旋翼系统主要是由桨叶、桨毂中央件、挥舞铰、摆振铰、变距铰等部件构成。其中,桨叶作为直升机产生升力的主要部件,在整个直升机的研制工作中显得尤为重要。
直升机桨叶模态试验是整个直升机桨叶结构设计过程中很重要的一个环节。对直升机桨叶开展模态试验研究可以得到桨叶各阶次模态频率和振型等参数信息。通过对比模态试验结果和所设计的桨叶参数预估值来验证所制造的桨叶质量以及刚度分布是否满足设计需要,对桨叶在旋翼系统中的旋转稳定性以及安全性都具有很重要的意义。
现今常用的桨叶模态试验方法是锤击脉冲激励法:用力锤敲击来对桨叶进行激励,利用布置在桨叶上的模态传感器采集得到桨叶的振动信号,再通过对振动信号和力信号进行放大分析计算处理得到桨叶振动的频响函数、振型、固有频率等信息。试验原理框图如图1所示。
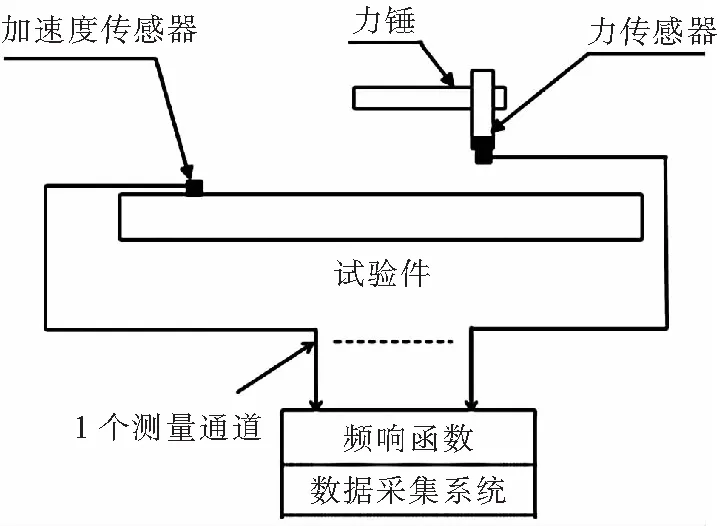
图1 试验原理框图
由于常用的模态传感器是接触式测量传感器,对于质量体积较大的试验件桨叶,传感器的重量可以忽略不计。但是对于一些新兴的小型直升机桨叶和无人机的主、尾桨叶等轻质结构,不同传感器重量以及数量对试验结果带来的附加质量影响就不容忽视。讨论传感器所带来的附加质量对直升机桨叶模态试验的影响是本文研究的重点。
1 附加质量影响模态频率分析理论
桨叶在受到力锤敲击激励之后振动微分方程如下所示:

(1)
其中,、、分别为桨叶阶的质量矩阵、阻尼矩阵和刚度矩阵。桨叶自由振动时各阶模态频率由如下无阻尼自由振动方程得到,代数方程表示:
(-)=0
(2)
以上方程组存在非零解的充分必要条件是系数行列式为零:
|-|=0
(3)

(4)
通过求解上式的特征方程即可得到桨叶各阶的模态频率。其中为各阶的模态频率,为各阶频率所对应的振型。
由上可引入附加质量Δ,得到带有附加质量的振动方程:
西方人民在长期改造自然的过程中衍生出了“物我分离”的思想,注重客观事物对人产生的作用和影响,严格区分主客体,习惯了以物本为主体的客体思维方式,语言表达上力求客观、公正、严谨。相反,中国古代哲学家所倡导的是“天人合一”的思想,强调人与自然的和谐统一,因此形成了汉民族以人为中心的主体性思维方式。换句话来说就是,英语倾向于客体性描述,汉语注重本体性叙述。这两种不同的思维方式在语言上的反映就是,英语大多以物或抽象概念为主语,且不存在无主句;而汉语则习惯以人为主语,有时甚至会隐含或省略人称,产生无主句。以下句为例:

(5)
同理可得到特征多项式为:
|-(+Δ)|=0

(6)
针对其中某一阶模态频率与附加质量的关系可以推导出桨叶的模态频率随附加质量变化的规律如下:

(7)
按照上式绘出模态频率随附加质量比的变化趋势图如图2。由图中可知,模态频率随着附加质量的增大而减小。
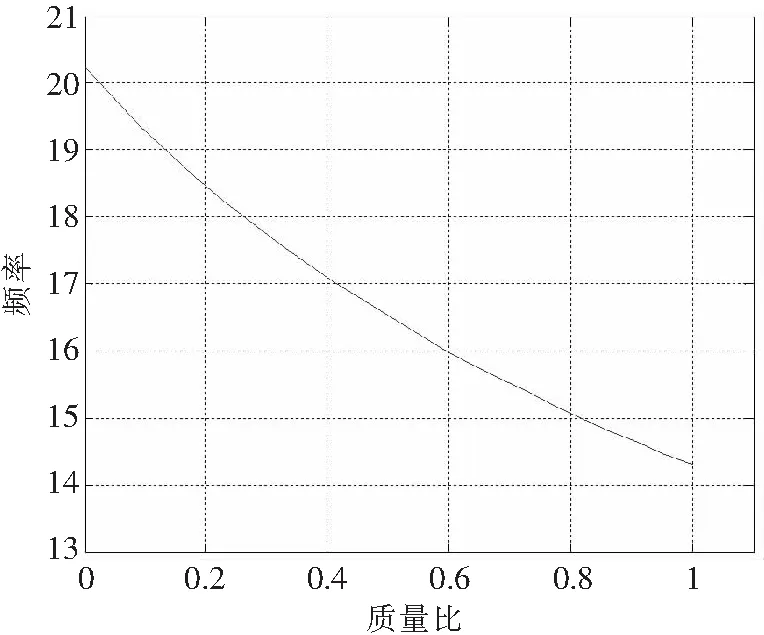
图2 模态频率随附加质量变化趋势图
2 试验模型对比
为研究传感器附加质量对试验件桨叶动特性带来的测量误差,采取某小型无人机的轻质桨叶作为试验对象开展研究。为简化试验流程,只针对桨叶挥舞向的振动结果进行分析。该桨叶的参数信息如表1所示。

表1 试验桨叶参数信息表
对桨叶进行离散建模如图3所示,根据桨叶实际尺寸在桨叶上一共布置29个测点得到桨叶的离散试验模型。试验数采设备选用LMS TEST.Lab 32通道数据采集系统;加速度传感器选择精度为0.15%的ICP加速度拾振传感器;激励信号采集的传感器选用B&K动态力传感器。传感器参数信息如表2所示。
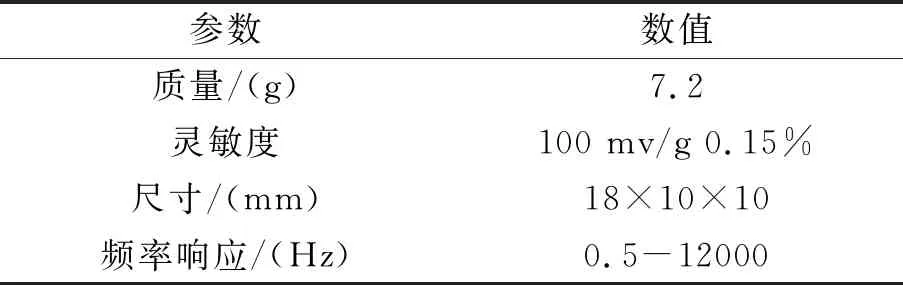
表2 ICP加速度传感器参数信息
在桨叶模态试验中,最常用的试验方法为锤击法。锤击法又可以分为多点敲击单点拾振和单点敲击多点拾振。这两种试验方法测得的数据在理论上均能得到桨叶的频响函数矩阵,区别在于:
2)两种方法获得的频响函数矩阵方式不同。频响函数矩阵是对角矩阵,多点敲击单点拾振获取的是频响函数矩阵的列向量,而单点敲击多点拾振获取的是频响函数矩阵的行向量。
此次试验是通过不同传感器数量来探究传感器附加质量对模态试验结果的影响。为控制变量,采取了单点敲击多点拾振的方式,在桨叶上分别布置1个、10个、29个传感器,分别对应的附加质量为7.2 g、72 g、208.8 g。传感器的布置节点如图3所示。将传感器均布在桨叶上,探究三种传感器附加质量状态下的桨叶模态频率的影响。通过第三种传感器布置方式获得桨叶的模态振型,并利用模态置信值MAC来对所得到的模态进行验证,获得三种状态下同样振型所对应的频率值。

图3 两种不同桨叶节点模型图
3 试验数据对比分析
用轻质弹性绳悬挂桨叶来模拟自由-自由边界条件。在该条件下分别对不同种传感器布置方式的主桨叶进行模态敲击试验,得到三种状态下的桨叶频响函数如图4所示。两种传感器布置状态下桨叶的固有频率以及阻尼值如表3及图5所示。相对应各个频率下的模态振型图如图6所示。

图4 桨叶模态频响函数图

图5 不同附加质量对应频率的结果对比图

表3 某型无人机主桨叶自由状态下模态试验结果

图6 桨叶前三阶挥舞模态振型图
从表3中可以看出,布置单个传感器获得的桨叶一阶挥舞固有频率为20.268 Hz,而由于传感器带来72 g、208.8 g附加质量的影响,其一阶挥舞固有频率分别降为19.311 Hz、17.951 Hz,与应用单个传感器的试验状态获取的频率响应结果相差1.157 Hz和2.317 Hz,其中二阶挥舞固有频率相差2.341Hz,三阶挥舞固有频率相差4.89 Hz。而前四阶固有频率由于传感器附加质量带来的测试最大偏差达到了11.4%,远远超过了5%的工程误差要求。由此可见,针对桨叶模态试验,不同数量、重量的振动模态传感器对试验结果的精确性具有显著的影响。
4 结论
本文通过对同一片直升机桨叶布置不同数量的传感器开展模态试验,来模拟不同附加质量对直升机桨叶模态试验结果的影响,发现随着布置的传感器数量增加,相应的附加质量也越大,桨叶的各阶频率会随着附加质量的增加而减小。而且随着振动模态阶次的增加,由附加质量带来的各阶模态频率结果偏差也会增大。在最多布置29个测试点位的情况下,所测得的第3阶挥舞频率产生了最大15%的频率偏差。结合本次研究结果,在后续试验过程中应该注意以下几点:
1)在保证试验任务要求的前提下,尽量减少拾振传感器的数量以减少附加质量对试验结果带来的影响;
2)在试验精度的允许范围内,后续进行桨叶模态试验时可采用重量更小的接触式或者采用非接触式的振动传感器来进行试验;
3)可利用仿真计算与试验相结合的方式来消除试验过程中拾振传感器的附加质量对试验结果的影响。