单相级联中点箝位整流器IGBT 和传感器的统一故障诊断方法
2022-03-17晋明波葛兴来
晋明波,葛兴来
(1. 西南交通大学 唐山研究院,河北 唐山 063000;2. 西南交通大学 磁浮技术与磁浮列车教育部重点实验室,四川 成都 610000)
0 引言
现有牵引系统中的工业频率牵引变压器存在体积较大、噪声污染、输出电压不可调节等缺点,电力电子牵引变压器PETT(Power Electronic Traction Transformer)可以较好地解决上述传统电力牵引变压器的问题[1]。作为PETT 的前端输入级,单相级联中点箝位整流器SPCNPCR(Single-Phase Cascaded Neutral Point Clamped Rectifier)包含大量功率电子器件和传感器,因此其故障率较传统电力牵引变压器高[2-3]。作为牵引变流器的核心器件,绝缘栅双极型晶体管IGBT(Insulated Gate Bipolar Transistor)的主要故障类型有短路故障和开路故障,通常情况下,系统已集成硬件电路应对短路故障,与短路故障相比,开路故障虽然不会马上使系统崩溃,但是会造成电流的失真甚至是系统其他器件的二次故障,所以研究IGBT 的开路故障诊断非常重要[4]。网侧电流传感器的采样精度和实时性很大程度上决定了系统的动、静态性能,同时也是实现高性能闭环系统的关键,所以传感器故障诊断技术的研究也得到学者的广泛关注[5]。因此,为了提高SPCNPCR 的可靠性和维修效率性,研究IGBT 开路故障和网侧电流传感器故障具有重要的意义。
目前针对IGBT 和传感器的故障诊断方法分为基于信号、基于模型、基于知识的故障诊断方法。基于信号的故障诊断方法多通过提取系统的电压[6-7]和电流[8-9]参数进行分析得出故障信息进而达到故障诊断的目的。文献[10]提出了一种基于分析输出电压谐波的方法,该方法在级联H 桥逆变器每个子模块输出侧增加了一个电压传感器以实现故障模块的定位。基于电压信号的故障诊断方法往往需要增加新的电压传感器,一定程度上增加了系统的复杂性和成本。基于电流的故障诊断方法[11-12]虽然不需要增加新的传感器,但是在轻载和负载突变工况下精度较低。此外,基于滑模观测器[13]、Luenberger 观测器[14]、Kalman 滤波器[15]、混合逻辑动态模型[16]等基于模型的故障诊断方法也被广泛研究。文献[13]通过构建滑模观测器实现了级联H桥整流器的故障诊断,该方法通过比较残差和预先设定阈值的大小可以检测以及诊断出IGBT 故障位置,但是不能实现多个IGBT 的故障诊断。基于知识的故障诊断方法通常需要采集系统的电压和电流信号,通过神经网络[17]、支持向量机[18]、模糊逻辑[19]等方法实现故障诊断,但这些方法需要大量的训练数据,同时也需要更长的诊断时间。文献[20]基于状态观测器以及残差诊断出IGBT 开路故障位置和网侧电流传感器故障类型,但是该方法存在诊断变量单一的问题,当诊断对象为多模块变换器时,该方法不能实现对故障模块的定位。文献[21]提出了应用于电压源型逆变器IGBT 和电流传感器复故障诊断方法,通过信号处理的方法可以诊断故障的IGBT 和电流传感器,但是该方法不能得到电流传感器的具体故障类型。综上所述,通过对已有的文献进行调研和总结,现阶段的级联变换器故障诊断算法主要存在以下问题:①现有研究主要通过增加传感器定位级联变换器中发生开路故障的模块,不仅增加了系统的复杂性和成本,而且降低了系统的可靠性;②当多个IGBT 同时发生开路故障时,现有方法不能实现故障开关的有效定位;③现有方法不能区分故障源是IGBT 还是传感器,也不能诊断具体的传感器故障类型。
SPCNPCR 相对于三电平整流器有更多的模块,控制策略也更加复杂,所以增加了故障检测的难度,为此本文针对SPCNPCR 模块内的单个/多个IGBT开路故障,以及网侧电流传感器增益、偏移和漂移故障,研究了一种SPCNPCR 的IGBT 和网侧电流传感器的统一故障诊断方法。通过对SPCNPCR 进行混合逻辑动态建模得到电压和电流的残差,在此基础上可实现单个/多个IGBT 开路故障诊断和网侧电流传感器的故障诊断。最后,利用硬件在环测试系统对所提方法进行验证。
1 SPCNPCR的状态模型
1.1 SPCNPCR系统
SPCNPCR 系统结构如图1 所示,由n个单独的中点箝位(NPC)整流器构成。图中,uN为网侧电压;ucon为系统的输入侧电压;iN为网侧电流;Udci和ioi分别为级联模块的直流侧输出电压和电流;LN和RN分别为网侧等效牵引电感和电阻;每个NPC 整流器包括8 个IGBT(Tim1—Tim4)及其反并联二极管(Dim1—Dim4),以及4 个箝位二极管Dicm1—Dicm2,定义sim1—sim4为Tim1—Tim4的开关驱动信号;Ci1和Ci2为稳压电容;Ri为等效电阻负载;i=1,2,…,n且m∈{a,b}。

图1 SPCNPCR系统结构Fig.1 Structure of SPCNPCR system
瞬态电流控制、电压均衡控制和载波移相调制技术的组合可以产生每个NPC 整流器模块的IGBT开关驱动信号。瞬态电流控制策略如附录A 图A1所示,通过瞬态电流控制方法可以实现整流器的单位功率因数运行,并使系统直流输出电压稳定在给定值且在一定范围内连续可调。电压均衡控制策略如附录A 图A2所示,通过电压均衡控制策略可使各模块输出电压相等且稳定在给定值。载波移相脉宽调制(PWM)技术原理附录A 图A3 所示,调制波和n组相位差相等的三角载波(u1、u2、…、un)比较得到IGBT 驱动信号。通过载波移相PWM 技术可以提高SPCNPCR 的等效开关频率,同时也降低了iN的谐波含量。
1.2 SPCNPCR的混合逻辑动态模型
基于混合逻辑动态模型的故障诊断方法与其他基于模型的故障诊断方法的不同之处为混合逻辑动态模型中既包含连续变量也包含离散变量。在SPCNPCR 系统中,连续变量包括uN、iN等,离散变量包括IGBT 开关驱动信号、电流极性等。混合逻辑动态模型的正确建立不仅需要IGBT 驱动信号,而且需要知道网侧电流的极性,所以定义逻辑变量δL和λL描述网侧电流极性:
式中:UCi1、UCi2分别为电容Ci1和Ci2两侧的电压。
通过式(2)可得输入电压ucon的估计值u^con为:
求解式(7)可得到网侧电流残差的表达式为:式中:t0为系统中级联模块每次开关状态改变后的初始时刻;q′i1、q′i2为控制电路输出的开关信号事件。
在铁路牵引领域中,脉冲整流器的开关频率范围一般为350~500 Hz。对于SPCNPCR 系统,由于使用载波移相PWM 技术,所以它的等效开关频率是三电平脉冲整流器的2n倍。如附录A 图A4 所示,在此开关频率下,e-RNt/LN和1-RNt/LN大致相等,所以式(8)可写为:
2 故障特征的分析
2.1 IGBT开路故障特征的分析
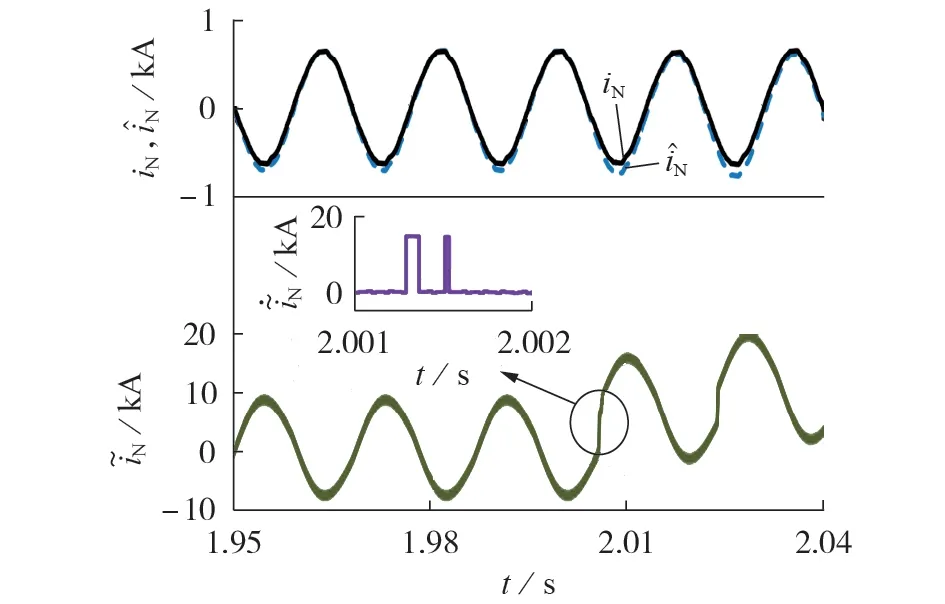
图2 牵引模式下Tia1发生开路故障时的网侧电流和电流残差Fig.2 Grid-side current and current residual for Tial open circuit fault under traction mode
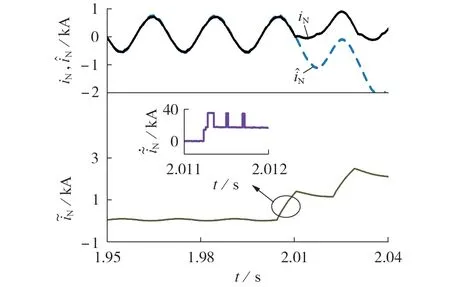
图3 牵引模式下Tia2发生开路故障时的网侧电流和电流残差Fig.3 Grid-side current and current residual for Tia2 open circuit fault under traction mode
将式(11)代入式(10)可得当Tia1发生开路故障时网侧电流残差的表达式为:
当Tia2发生开路故障时,sia2等效为0,由式(5)可得开关函数的表达式为:

将式(13)代入(10)可得当Tia2发生开路故障时网侧电流残差的表达式为:
其余IGBT 开路故障分析过程可类似Tia1、Tia2,本文不再赘述。各个开关管发生开路故障时的i~˙N如表1所示。

表1 不同IGBT发生开路故障时的电流残差变化率Table 1 Change rate of current residual for open circuit faults of different IGBTs
2.2 网侧电流传感器故障分析
网侧电流传感器故障类型分为增益故障、偏差故障、漂移故障3类,相应的表达式为:
式中:y0为网侧电流实际值;y为电流传感器测量值;a、b、c分别为故障增益系数、偏差系数和漂移系数;Δt0为故障持续时间。
由式(15)可知,当传感器发生上述3 种故障之一时,传感器采集得到的网侧电流值会与真实值存在一定的误差,所以通过混合逻辑动态模型得到的电流估计值和传感器采集得到的实际值不相等。网侧电流传感器发生增益故障时电流传感器实测值iN、电流估计值以及电流残差的变化规律如图4所示。网侧电流传感器发生增益故障时iN、以及的变化规律如附录A 图A7 所示。t=0.5 s 时,分别设置传感器增益故障和偏差故障,在故障发生前,电流残差在0 附近波动。在电流传感器发生增益故障后,电流实测值是电流估计值的a倍,电流残差数学表达式为正弦函数,频率与电流实际值相同;在电流传感器发生偏移故障后,电流实测值与电流实际值相差常数b,电流残差数学表达式为一常数。
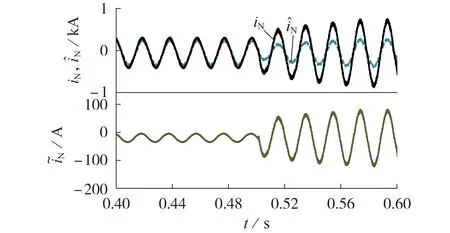
图4 电流传感器发生增益故障时的网侧电流和电流残差Fig.4 Grid-side current and current residual for gain fault of current sensor
3 SPCNPCR的多类故障诊断算法
3.1 故障类型区分
本文的多类故障诊断算法可区分IGBT 开路故障和网侧电流传感器故障。当IGBT 发生开路故障时,所提算法可通过故障特征定位到具体的故障模块以及发生开路故障的IGBT;当网侧电流传感器发生开路故障时,所提算法可区分电流传感器故障类型。定义诊断变量Ei的表达式为:
同时定义诊断阈值h1、h2以及r1的表达式为:
式中:ε1、ε2、ε3为较小的误差容错值。
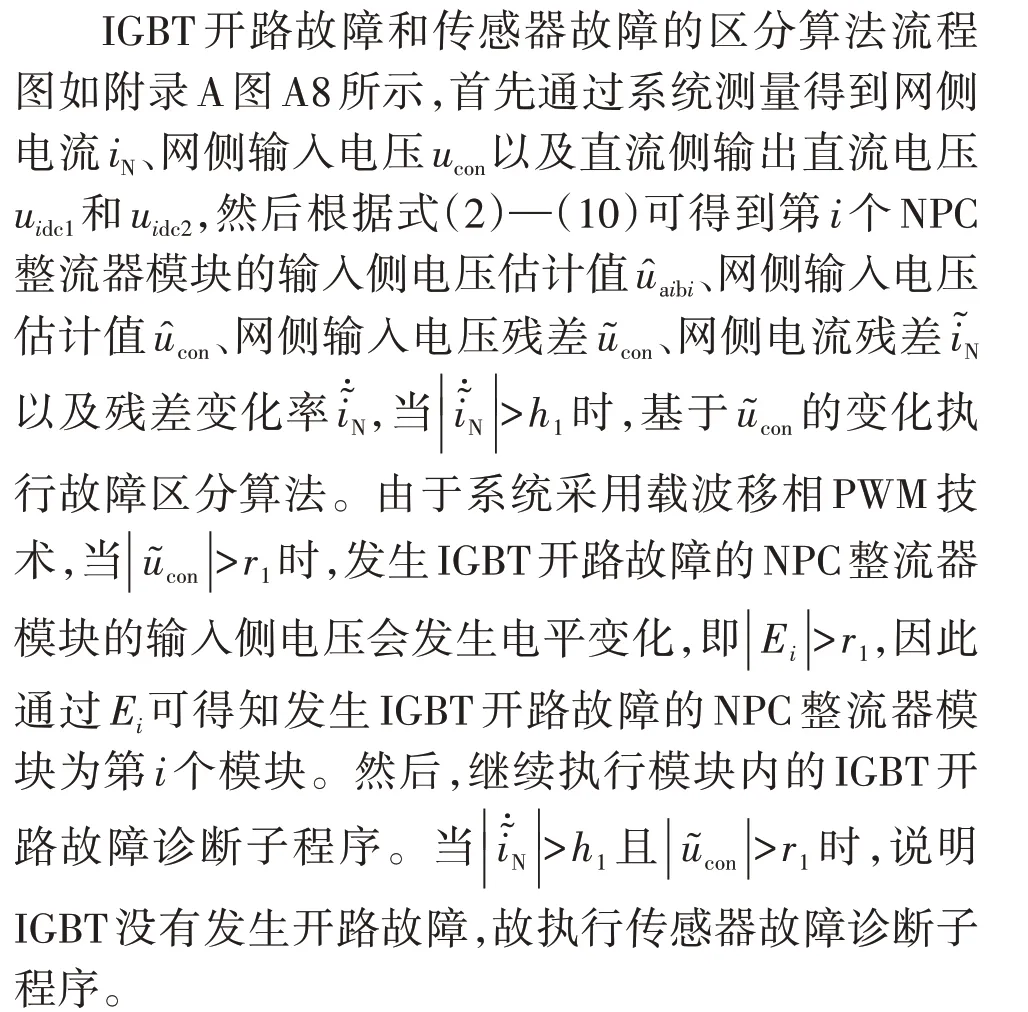
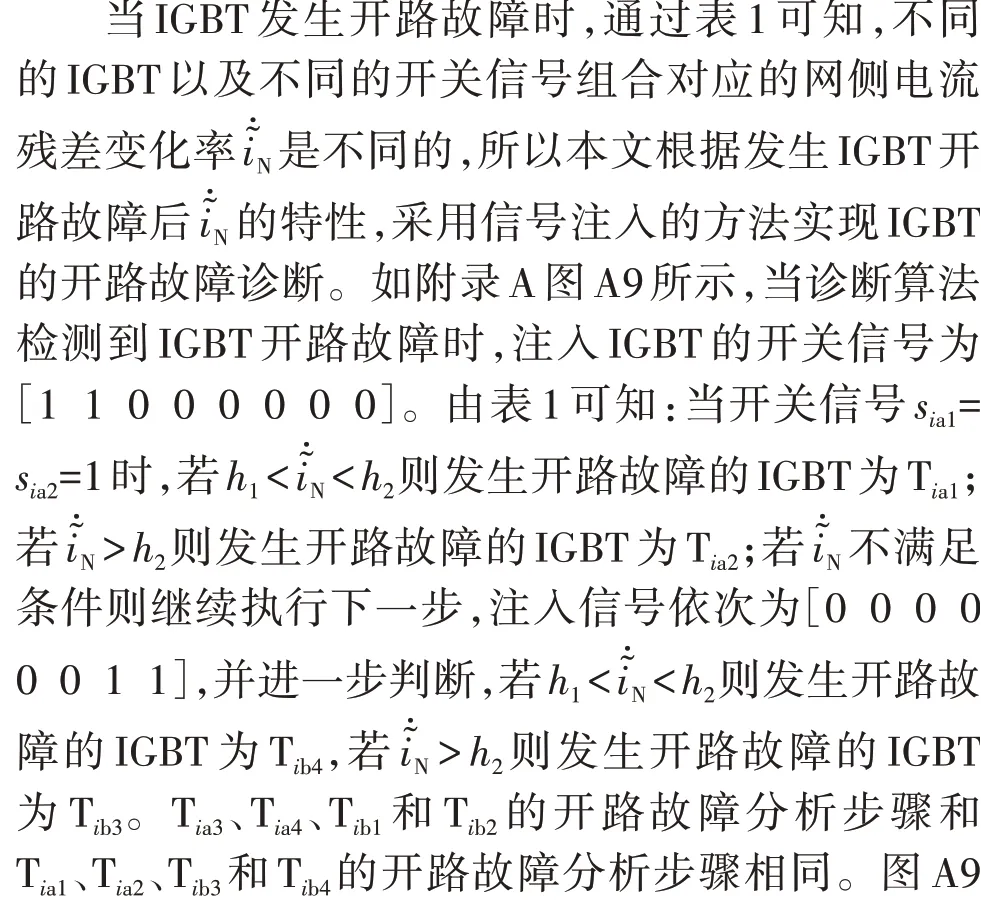
3.2 IGBT开路故障诊断算法
3.3 网侧电流传感器故障诊断算法
设f为SPCNPCR 系统网侧电流的频率,fi为电流传感器采集数据的频率,则网侧电流传感器每个周期采样的数据个数为C=f/fi,定义函数m(k)和n(k)分别为:
同时为了提高该诊断算法的抗干扰性和稳定性,定义函数M(k)和N(k)分别为:
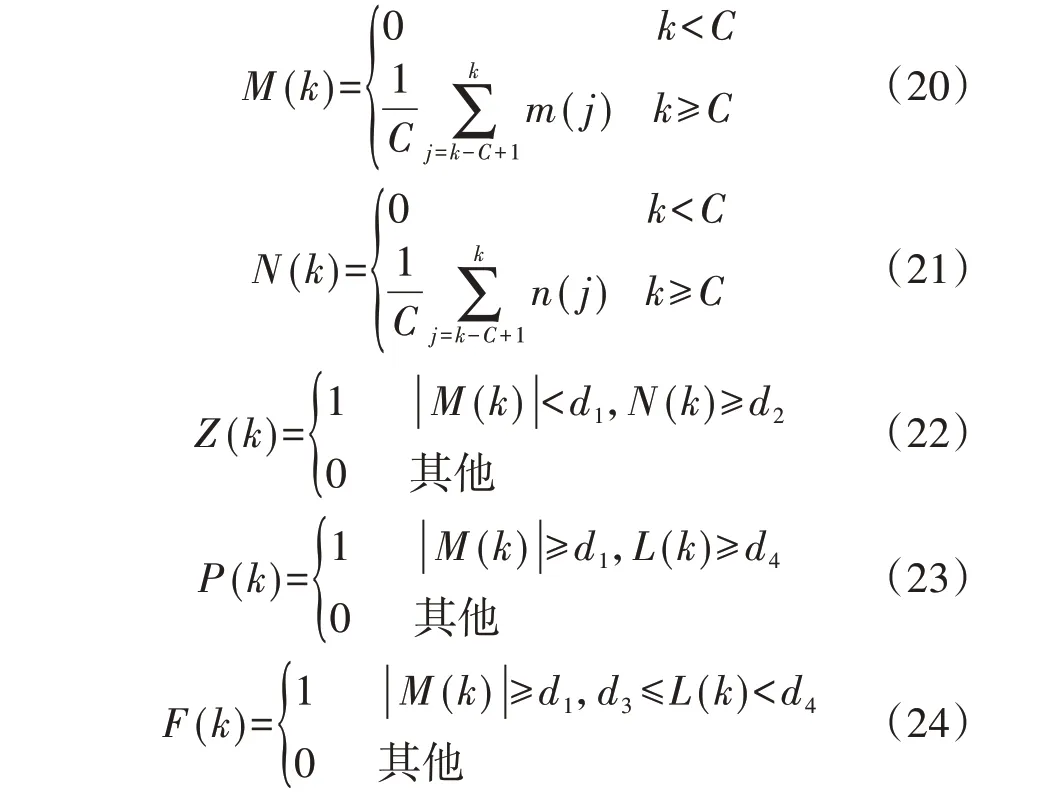
式中:Z(k)、P(k)、F(k)分别为电流传感器发生增益故障、偏移故障和偏移故障的故障诊断结果,初始时默认取值为0,当诊断算法区分出相应的电流传感器故障类型时置为1。传感器故障诊断算法流程图如附录A图A10所示。
4 硬件在环测试系统实验验证
4.1 SPCNPCR正常运行实验结果
为了验证SPCNPCR 的IGBT 和传感器的故障诊断效果,本文搭建的硬件在环测试系统如附录A 图A11 所示。单相2 级联NPC 整流器搭建在Starsim 中作为虚拟被控对象。控制器为TMS320F28335 DSP,采样频率为20 kHz。Starsim实时仿真器和控制器通过接口机箱实现硬件连接完成模拟/数字信号的输入输出、数据交互等功能。应用于硬件在环测试系统的SPCNPCR参数如附录A表A1所示。
SPCNPCR 正常运行的波形如附录A 图A12 所示。从图中可看出,交流侧电压uN和交流侧电流iN同相位,功率因数为1。交流侧电流估计值和实测值iN的误差较小,直流侧电压udci稳定,系统稳定运行。
4.2 SPCNPCR的IGBT故障实验结果
SPCNPCR的模块1发生故障时的诊断实验结果如5 所示。从图中可看出:当模块1 没有发生故障时,网侧输入电压的实际值ucon和估计值之间的残差在0 附近波动;||>r1时,表明NPC 整流器模块1内发生IGBT开路故障。
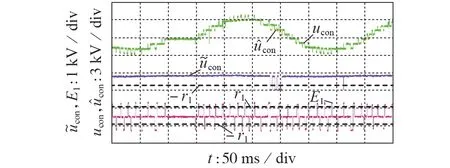
图5 SPCNPCR的模块1故障诊断的实验结果Fig.5 Experimental results of cell1 fault diagnosis in SPCNPCR
模块1中T1a2和T1b1发生IGBT开路故障时的诊断实验结果分别如附录A 图A13 和A14 所示。当T1a2发生开路故障时,由表1 可知在不同开关信号组合下网侧电流残差变化率分别为udc/LN和udc/(2LN),且在牵引模式下网侧电流在一个周期内经过T1a2的时间较多,所以变化较为明显,实验结果与理论分析和仿真结果相同。当T1b4发生开路故障时,由表1可知为udc/(2LN),且在牵引模式下网侧电流在一个周期内流过T1b4的时间较少,所以变化较小,实验结果与理论分析结果相同。模块1 中T1a2和T1b1发生IGBT 开路故障时的测试结果如图6 所示。从图中可以看出,当模块1 中T1a2和T1b1发生IGBT 开路故障时,>h1,系统注入信号[1 1 0 0 0 0 0 0 0],此时>h2,3 个控制周期后故障诊断标志F1a2跳变为1,表明模块1中T1a2发生开路故障。然后,系统注入信号[0 0 0 0 0 0 1 1],此时介于h1和h2之间,3个控制周期后故障标志F1b4跳变为1,表明模块1中T1b1发生开路故障。
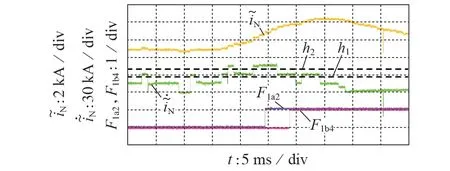
图6 模块1的T1a2和T1b1故障诊断的实验结果Fig.6 Experimental results of T1a2 and T1b1 fault diagnosis in cell1
4.3 SPCNPCR的传感器故障实验结果
网侧电流传感器发生增益故障时的诊断实验结果如图7 所示。设定增益参数为1.1,从图中可知当诊断出网侧电流传感器发生故障后,M(k)<d1,N(k)<d2,网侧电流传感器增益故障标志位Z(k)发生跳变,即可知网侧电流传感器发生增益故障。
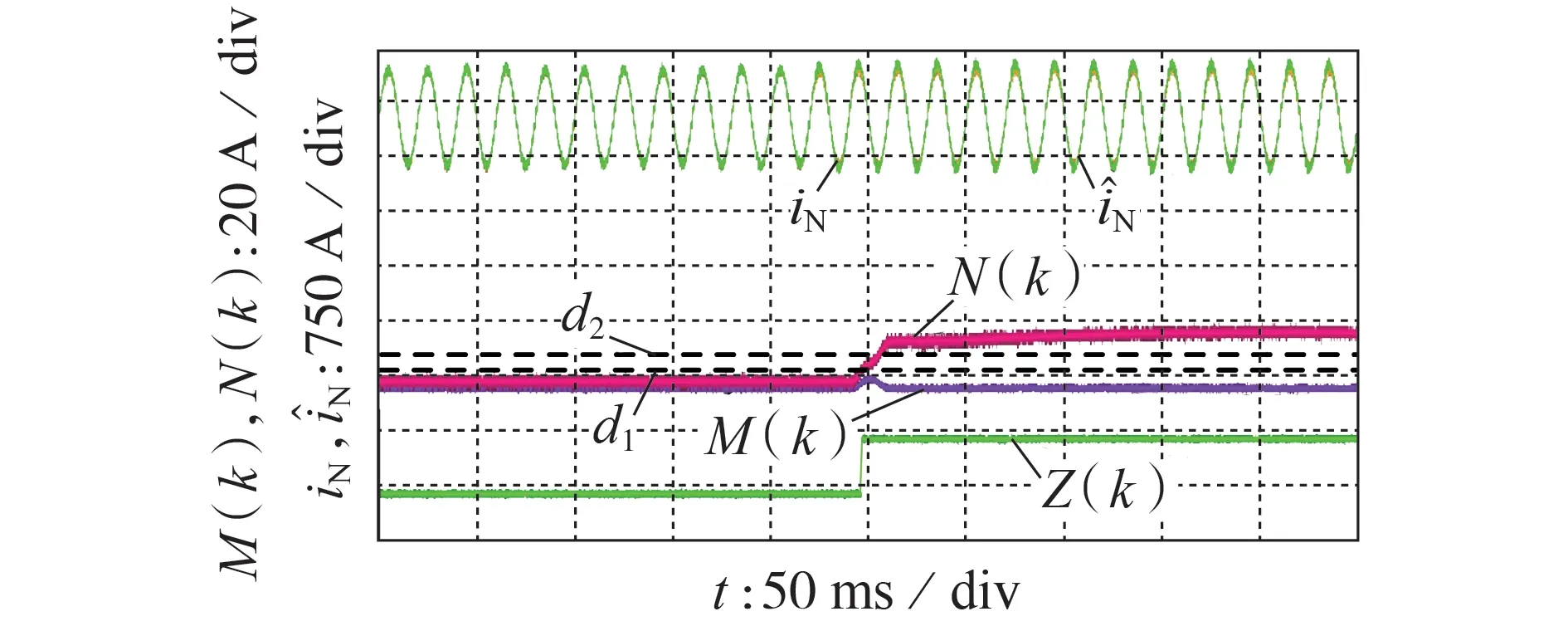
图7 网侧电流传感器增益故障诊断的实验结果Fig.7 Experimental results of gain fault diagnosis of grid-side current sensor
附录A 图A15 给出了网侧电流传感器发生偏移故障时的诊断实验结果。设定偏移参数为15,从图中可知当诊断出网侧电流传感器发生故障后,M(k)>d1,L(k)>d4,网侧电流传感器增益故障标志位P(k)发生跳变,即可知网侧电流传感器发生偏移故障。
网侧电流传感器发生漂移故障时的诊断实验结果如附录A 图A16 所示。设定漂移参数为10,从图中可知当诊断出网侧电流传感器发生故障后,M(k)>d1,d3<L(k)<d4,网侧电流传感器漂移故障标志位F(k)发生跳变,即可知网侧电流传感器发生漂移故障。
5 结论
本文研究了一种基于模型的SPCNPCR 的故障诊断方法,实现了SPCNPCR 的IGBT 开路故障和网侧电流传感器的增益、偏移、漂移故障的综合诊断,通过MATLAB 以及硬件在环测试平台验证了该方法的正确性和有效性,所得结论如下:
1)针对SPCNPCR 中模块数量多的问题,提出了一种基于输入电压残差定位发生IGBT 开路故障的模块的方法,该方法只需在输入端增加1 个电压传感器;
2)针对SPCNPCR 中IGBT 数量为两电平整流器的2 倍、模块结构复杂的特点,通过电流残差变化率结合信号注入的方法可实现单个或多个IGBT 开路故障定位;
3)通过电流残差检测故障,基于电压残差可区分IGBT 和电流传感器故障类型,并且通过对电流残差信号进行处理可实现电流传感器的增益、偏移和漂移故障类型区分。
附录见本刊网络版(http://www.epae.cn)。