利用方向自适应投影统一运营铁路坐标系
2022-03-16庞远超
庞远超
(中铁二院工程集团有限责任公司, 成都 610031)
TB 10601-2009《高速铁路工程测量规范》中明确要求控制网设计时边长投影变形值不大于10 mm/km[1],为满足此规定,国内各铁路设计院通常把1条几百公里的高速铁路划分为多个几十公里的工程投影独立坐标系,因此在铁路设计、施工、运营维护阶段不可避免地需要进行频繁的换带计算[2]。铁路选线设计会在投影带重叠区域选择直线段来进行搭接,由于该直线段处于前后两个不同的投影带中,按照不同投影带线路交点坐标等参数推算会得到两条不同的线路设计中线,即两条设计中线存在横向偏差[3-4]。
换带搭接段横向偏差如图1所示,前投影带依据交点P1、P2和线路设计参数计算得到P3的实际位置P′3;后投影带依据交点P3、P4和线路设计参数计算得到P2的实际位置P′2;在轨道精调[5]时会发现线路搭接段上的搭接点(D0)按前后投影带交点坐标和线路设计参数分别计算得到的位置为D1和D2,若处理不当,将降低轨道的平顺性,给高速铁路运营安全带来隐患。
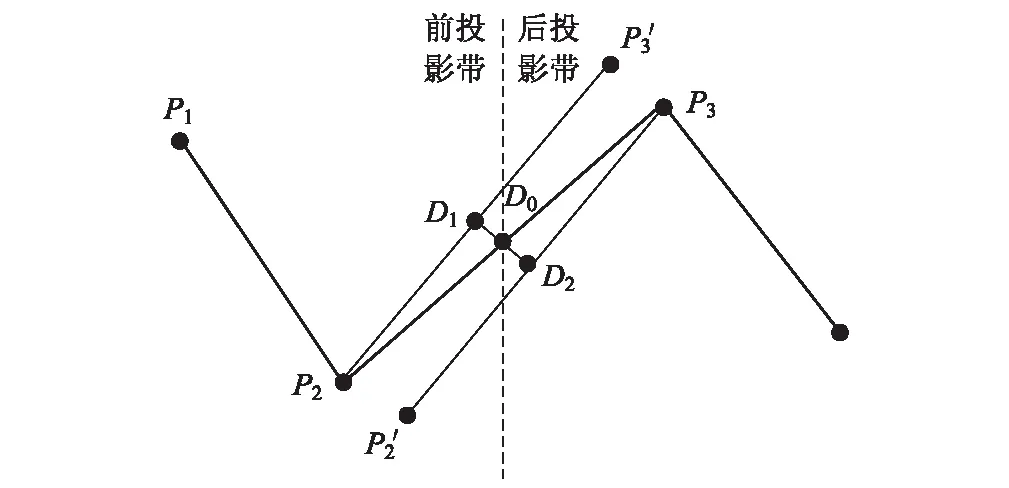
图1 换带搭接段横向偏差图
对于搭接段横向偏差的处理及研究,李阳腾龙[6]提出了顾及重叠区和非重叠区的高速铁路分段测量数据平顺性连接方法,杨雪峰、刘成龙[7]等研究了不同测站数据之间的搭接精度指标,他们针对搭接数据的方法处理及精度指标提出有效的约束,一定程度上降低了搭接段的横向偏差,但由于两个不同的投影带坐标系,投影变形始终是不一致的,没有从根本上消除横向误差。为彻底消除换带搭接重叠段横向偏差、,本文提出将运营铁路多个投影带坐标系统一到1个坐标系的思路[8-9],1条运营铁路只有1个坐标系之后,就不会存在搭接段,更不会出现设计中线存在横向偏差的问题,但坐标系统一后与传统高斯分带投影的线路设计参数存在不一致,是否对轨道的平顺性造成影响,一直没有深入的探究。本文采用方向自适应投影统一运营铁路坐标系,同时采用严密的数学模型将高斯分带投影下运营铁路的平、纵断面线路参数转换到方向自适应投影坐标系,并将坐标系统一后的线路中线与高斯分带投影的线路中线进行平顺性对比,进一步分析采用方向自适应投影后的线路中线为设计中线对轨道精调造成的影响。
1 求解方向自适应投影下的交点坐标
方向自适应投影的具体过程如下[10]:
(1)通过严密三维平差得到控制点的大地坐标(B,L,H),进行坐标转换获取原坐标系椭球下的空间直角坐标(X,Y,Z)。
(2)通过旋转矩阵进行坐标轴方向旋转,获取方向自适应椭球下的(X1,Y1,Z1)。
(3)通过大地坐标转换获得方向自适应椭球下的大地坐标(B1,L1,H1)。
(4)通过投影变形计算,选择合适的中央子午线及投影面高程,进行方向自适应椭球下的工程独立坐标的高斯投影计算。具体步骤如图2所示。

图2 方向自适应投影的主要步骤图
通过以上步骤将原设计(多个投影带独立坐标)的线路设计交点坐标进行方向自适应投影变换,获得新的椭球下的大地坐标,最后通过高斯投影,选择合适的投影面(以下称“自适应投影面”),获取新椭球下的工程独立坐标(以下称“自适应椭球坐标系”)。
2 求解方向自适应投影面上的平面和纵断面线路参数
线路交点坐标投影变换后,线路设计参数会相应地变化,需建立严密的数学模型来计算自适应投影面上的线路平面和纵断面参数[11]。
2.1 自适应投影面上的线路平面参数
自适应投影面上的曲线半径R′和缓和曲线长l′主要受投影面高程差异的影响。投影面高程差异对半径和缓和曲线的改正图如图3所示。其关系可表示为:

图3 投影面高程差异对半径和缓和曲线的改正图
(1)
式中:S′——自适应投影面上的基线长度;
S0——原分带投影面上的基线长度[12];
R——地球半径;
H′和H0——自适应投影面的大地高和分带投影面的大地高。
通过式(1)计算出自适应投影面上的曲线半径R′和缓和曲线长l′。依据转换的交点坐标及计算得到的半径和缓和曲线长,计算出自适应投影面上的线路平面参数(包括偏角、曲线长、切线长、以及夹直线长等),进而推算出各交点及对应各个主点的里程。
2.2 自适应投影面上的线路纵断面参数
纵断面线路参数主要受相邻变坡点之间的高差和里程影响,相邻变坡点之间的高差应严格加入地球曲率对高差的改正[13]。原设计坡度表中变坡点的里程是分带投影平面里程(或称运营里程DK),为了能和自适应投影面上的平面里程(K)对应,需建立分带投影面里程转换到自适应投影面里程的精确数学模型[14]。自适应投影面上主点的里程是依据投影后的曲线半径和缓和曲线长推算的,各个主点的自适应投影里程和运营里程是一一对应的,可采用以下方法计算变坡点的自适应投影里程。
变坡点里程转换如图4所示,首先根据变坡点BP的运营里程判定该变坡点处于ZD1和ZD2之间,并计算出该变坡点到最近点ZD1的里程差L1。
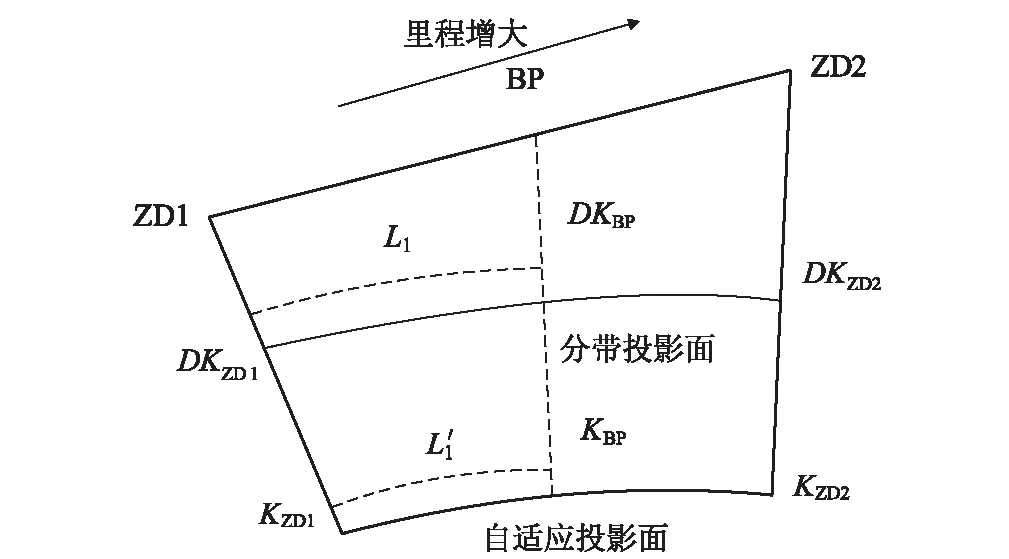
图4 变坡点里程转换图
L1=DKBP-DKZD1
(2)
然后计算主点间的里程变形比例因子k0。
(3)
接着计算变坡点在投影面上到最近主点(ZD1)的方向自适应投影里程差L1′。
L1′=k0×L1
(4)
最后可得变坡点的投影里程KBP。
KBP=KZD1+L′1
(5)
3 分析方向自适应投影下设计线路的平顺性
依据文献[15]可得线路平顺性指标为:
(6)
式中P、p分别为依据线路中线点坐标计算出投影变换前、后线路中线对应里程的矢高,计算公式为:
(7)
其中,(x1,y1)、(x3,y3)为弦线起点和终点坐标,(x2,y2)为检测点的坐标,坐标可用参数方程计算。为分析线路参数变化对线路平顺性的影响,设f=pi-pi+8,用线路参数方程带入式(7)并得出f关于半径和缓和曲线长的方程,以圆曲线段30 m弦检测方法为例,得到如下方程:

(8)

则:
(9)
根据复合函数求导公式,对半径R求导,获得f对变量R的微分:

(10)
依据文献[15]结论可知,半径变化1 m对线路30 m轨向和300 m轨向的影响随着设计半径的增大,影响越来越小,且都远小于相关规范对轨向限差要求。考虑到方向自适应投影后的半径变化远小于1 m,可认为自适应投影面上圆曲线段的半径变化对线路平顺性无影响。同理可以得出,自适应投影面上缓和曲线段半径和缓和曲线长变化对线路平顺性的影响远小于限差的结论,由于篇幅所限,在此不做继续推导。
4 实例分析
以国内某运营铁路项目线路设计参数为例,该线路由于纵断面坡度的设计要求共分为4个投影带,具体坐标系信息如表1所示。
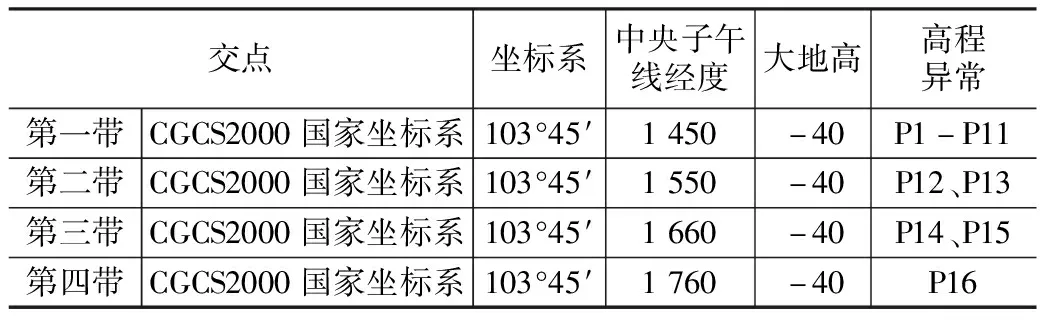
表1 国内某运营铁路工程高斯独立坐标系统表
换带处搭接段横向偏差如图5~图7所示。依据文献[13]中横向偏差的计算方法,得到该铁路3个不同坐标系搭接段约500 m设计中线的横向偏差。
从图5~图7可以看出,3个换带搭接处线路设计中线之间存在横向偏差范围,且第三个搭接段的横向误差已经达到了±(6~8)mm。论文采用方向自适应投影将4个投影带的设计参数转换到新的自适应投影面,得到统一坐标系后的平面和纵断面线路参数,如表2、表3所示。
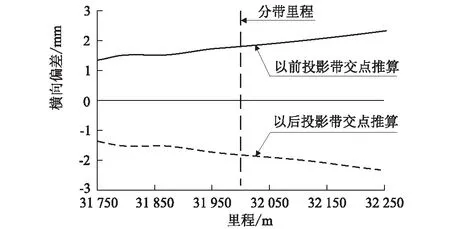
图5 第一个换带处搭接段横向偏差图

图6 第二个换带处搭接段横向偏差图

图7 第三个换带处搭接段横向偏差图

表2 统一坐标系后的平面线路参数与原始设计参数的较差(部分)表
由表2可知,为保证转换后的线路参数与原设计参数的一致性,统一坐标系后的平面线路参数与原始设计的线路参数存在较小的较差。
由表3可知,坐标系统一后变坡点方向自适应投影里程和转换前的连续里程存在较小的偏差,根据表中的数据和设计高程计算出转换后的坡度,发现转换后的坡度变化较小(小于1/100万),可忽略不计;根据文献[11]轨面里程的定义可知,对于同一条线路从不同投影面推算的变坡点轨面里程应该是相同的,均是线路沿着轨道平面的实际里程,但从表3可知转换前后变坡点轨面里程会不同,这恰好说明方向自适应投影后的线路与原始设计线路并不是完全等价的,而是存在变形的,需分析转换后的线路在水平面和竖直面上的平顺性变化[16];相邻变坡点之间的坡度变化可忽略,投影后直线段线路平顺性也不会改变,因此只需分析线路在投影水平面曲线段的平顺性变化,采用文献[10]中利用矢高计算轨向的方法,根据线路参数分别计算出线路中线点坐标,依据线路中线点坐标计算出坐标系统一前后线路对应里程的矢高P、p,然后依据式(6)计算平顺性指标,依据前文的公式和计算结果认为圆曲线半径和缓和曲线长变化不会影响线路的平顺性,偏角变化是影响线路平顺性的主要因素,如图8~图10所示,线路中偏角变化最大的交点(P13)对应曲线段坐标系统一前、后线路的10 m、30 m、300 m轨向,具体计算过程见文献[11]。

表3 坐标系统一前后变坡点里程表

图8 坐标系统一后线路10 m轨向图
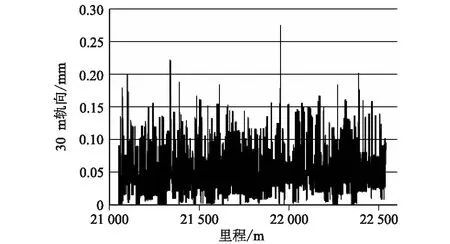
图9 坐标系统一后线路30 m轨向图

图10 坐标系统一后线路300 m轨向图
从图8~图10中可以看出,坐标系统一后线路10 m轨向最大不超过0.2 mm,远小于限差2 mm;30 m轨向最大不超过0.3 mm,远小于限差2 mm;300 m轨向最大不超过0.4 mm,远小于限差10 mm,可见方向自适应投影后不会影响对应曲线段线路的平顺性。不同投影带投影后的线路平顺性变化如表4所示,表中给出了平顺性变化的最大值和变化较大值(10 m、30 m、300 m轨向分别大于0.1 mm、0.2 mm、0.3 mm)所占的比例。
由表4可知,该线路各个投影带转化后,10 m轨向均不大于0.2 mm且大部分都小于0.1 mm,30 m轨向均不大于0.3 mm且大部分都小于0.2 mm,300 m轨向均不大于0.4 mm且大部分都小于0.3 mm。可以认为对于整条线路采用方向自适应投影实现坐标系统一的方法是不会影响线路的平顺性的。
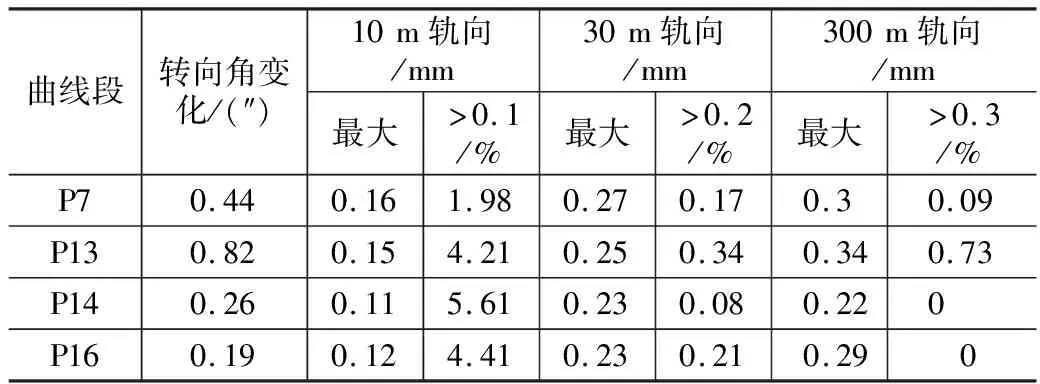
表4 线路参数变化及其对线路平顺性影响表
通过上述实例的分析和研究可知:由于椭球及投影面不同,坐标系统一后的线路参数与原始设计参数存在较小的较差,造成新的线路与原始设计线路存在较小的横向偏差,但对轨道平顺性造成的影响可忽略不计。
5 结论
高斯分带投影造成相邻投影带推算的线路搭接段设计中线存在横向偏差,轨道精调时会发现不同投影带坐标推算的线路中线不重合,给轨道精调和运营维护技术水平的提升带来障碍。本文提出了利用方向自适应投影实现运营铁路坐标系统一的方法,并通过工程实例分析得出以下结论:
(1)方向自适应投影下计算得到的线路参数与原始设计参数存在较小的偏差,但不会对轨道的平顺性造成影响,该方法是有效可行的。
(2)利用方向自适应投影统一坐标系后线路只有1个投影带,不存在换带搭接段,消除了换带搭接段线路设计中线存在横向偏差,在进行轨道检测时,使用1套设计文件就能进行整条线路的轨道检测,避免在换带区域更换设计文件,也避免进行多次数据换带转换,有效地提高了检测效率,具有较高的工程实用性。
(3)研究成果可为提升运营铁路的轨道精调效率提供借鉴。
