人工智能正颌外科的探索与临床初步应用
2022-03-16罗恩
罗恩
口腔疾病研究国家重点实验室 国家口腔疾病临床医学研究中心四川大学华西口腔医院正颌及关节外科 成都 610041
牙颌面畸形,是指因颌骨发育异常所导致的颜面形态不佳和咬合关系紊乱。对于该种疾病最常见的治疗方式是正颌外科手术治疗,并配合必要的术前、术后正畸[1]。
与口腔颌面外科其他疾病有所不同,正颌外科手术治疗方案的制订具有一定主观性,与专科医生的经验密切相关,优良的手术疗效需要建立在精准的手术前诊断与手术设计上[2]。目前,正颌外科已经普遍进入数字化阶段,随着数字化技术在颌面外科学的广范应用,以3D打印、虚拟手术设计技术、术中实时导航技术为特征的数字化外科技术迅速发展,这些技术被应用于牙颌面畸形的诊断与治疗,已经取得了一定成果,并显示出巨大的应用价值[3]。
目前的数字化正颌外科存在人工操作流程繁杂,重复性劳动比例高、效率低、耗时长,人工设计错误率高等问题,且在很多技术细节上仍然依赖于临床医生的经验,有着一定的可变性和不准确性。
随着计算机运算力的增加及算法的更新,人工智能(artificial intelligence)在各个领域应用不断扩大。在医学领域,人工智能目前最成熟的应用是进行数据分类预测,以及通过图像识别,结合大数据和专家系统,达到了满足临床应用水平的目的[4]。牙颌面畸形的诊断与手术设计标准化程度高,正颌外科数字化手术设计稳定,是实现计算机智能化诊断和手术设计的有利条件,将其用于牙颌面畸形的诊断和手术方案设计有很广阔的前景。
本课题组利用多种人工智能技术,开发出一套可以应用于临床诊断及手术方案设计的系统,并进行相关临床试验验证其临床使用可行性和准确性,期望其可以应用于临床辅助专科医生的工作。
1 人工智能自动定点
对患者的头面部标志点进行标定和对特异性距离、角度进行测量是客观反映患者颌面部畸形的重要参考,实现标志点的准确定位有重要价值。电子计算机断层扫描(computed tomography,CT)数据可以准确表现软硬组织三维结构,是实现数字外科的基础,也是人工智能技术应用的数据基础。CT扫描数据输出的格式本质是断层图像,采用基于阈值的优化算法实现了智能硬组织的三维重建。
人工智能自动定点的基础是人类颅骨、牙列的相似性,其原理基于点云配准和微分几何学的方法,实现由粗到精的自动识别和自动配准过程(图1)。其中,自动配准过程包括对不重叠点云自动配准和重叠点云的自动配准,以处理任意位置和姿态的颅骨目标模型;由配准结果得到粗略识别后的标志点,再基于微分几何学计算出点的高阶微分几何属性,可准确地刻画标志点的局部信息,从而实现标志点的精确识别。按照纳入标准选取一定数量模型标记标志点,然后处理成为基准颅骨模型后,使用迭代最近点(iterative closest points,ICP)算法,将目标颅骨模型向基准颅骨模型进行靠近[5],应用统计学来判断与目标最相似的基准颅骨模型,以此获取标志点的粗略位置,而后使用微分几何等获取坐标系点的精确位置,再次摆正头位,最后继续使用微分几何获取其余标志点的精确位置[6]。

图1 标志点自动识别流程图Fig 1 The flow diagram of automatic identification of marks
课题组初期构建了自动定点的算法模型,建立了基准颅骨模型,使用C++(计算机程序设计语言)、开放式图形库(open graphics library,OpenGL)和基于Qt的软件框架进行Windows平台的程序研发。研发过程中使用各类颅骨模型进行研究,人工验证自动定点的准确性,不断优化定点准确性,优化算法模型,优化定点效率,研发出颅骨自动定点测量软件(automatic identifying points and measurements of the skull,AIPMS)(图2)。
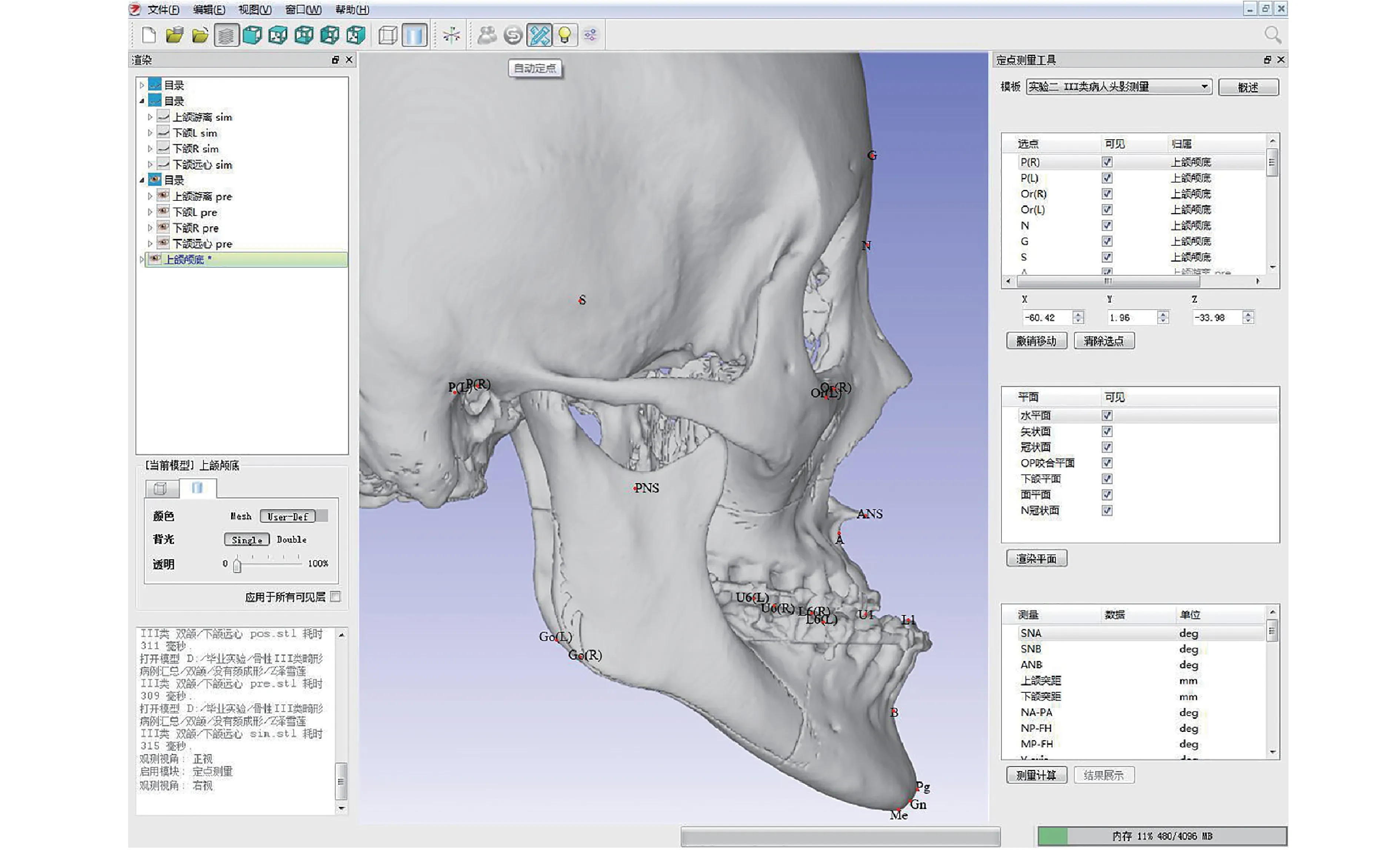
图2 AIPMS软件主体界面Fig 2 The main interface of AIPMS software
AIPMS软件测量模块的算法设计基于解析几何原理。解析几何是图形研究的几何学分支,在三维坐标体系中,可以使用解析几何来研究平面、球、立方体甚至是复杂几何体,同时研究其数学空间表达方程。临床上常用的测量包括距离、角度、以及投影值,软件中内置了一些常用测量(图3)。

图3 AIPMS软件中的测量类型Fig 3 The measurement types in AIPMS software
2 人工智能牙颌面畸形自动诊断
目前,临床上对于牙颌面畸形患者的诊断主要依赖于各项客观检查、分析测量结果以及临床医生的主观经验判断[7]。这些经验的获得需要经过长期的临床实践和训练才能获得,无法直接以公式的形式直接归纳总结,也很难通过短时间的培训让经验不足的医生迅速掌握[8]。
建立基于机器学习的算法模型,希望实现针对牙颌面畸形的智能诊断。牙颌面畸形智能诊断算法设计总体流程如下所示(图4)。

图4 基于XGBoost算法的人工智能牙颌面畸形诊断流程Fig 4 The process of artificial intelligence malocclusion deformity diagnosis based on XGBoost algorithm
选取有20年以上工作经验正颌外科专家给出牙颌面畸形诊断,且初诊时拍摄螺旋CT的300名患者为研究对象。根据临床实际需求对诊断结果主要针对上颌骨和下颌骨两个部分。上、下颌骨发育畸形主要涵盖颌骨发育过度、颌骨发育不足、颌骨偏斜。发育正常指无明显骨性发育异常,不需要手术矫治。课题组分别采用判别分析分类算法、朴素贝叶斯分类算法、XGBoost、神经网络分类算法和支持向量学习机算法进行了模型构建和验证。最终的实验结果显示,XGBoost算法表现出最好的结果(图5)。
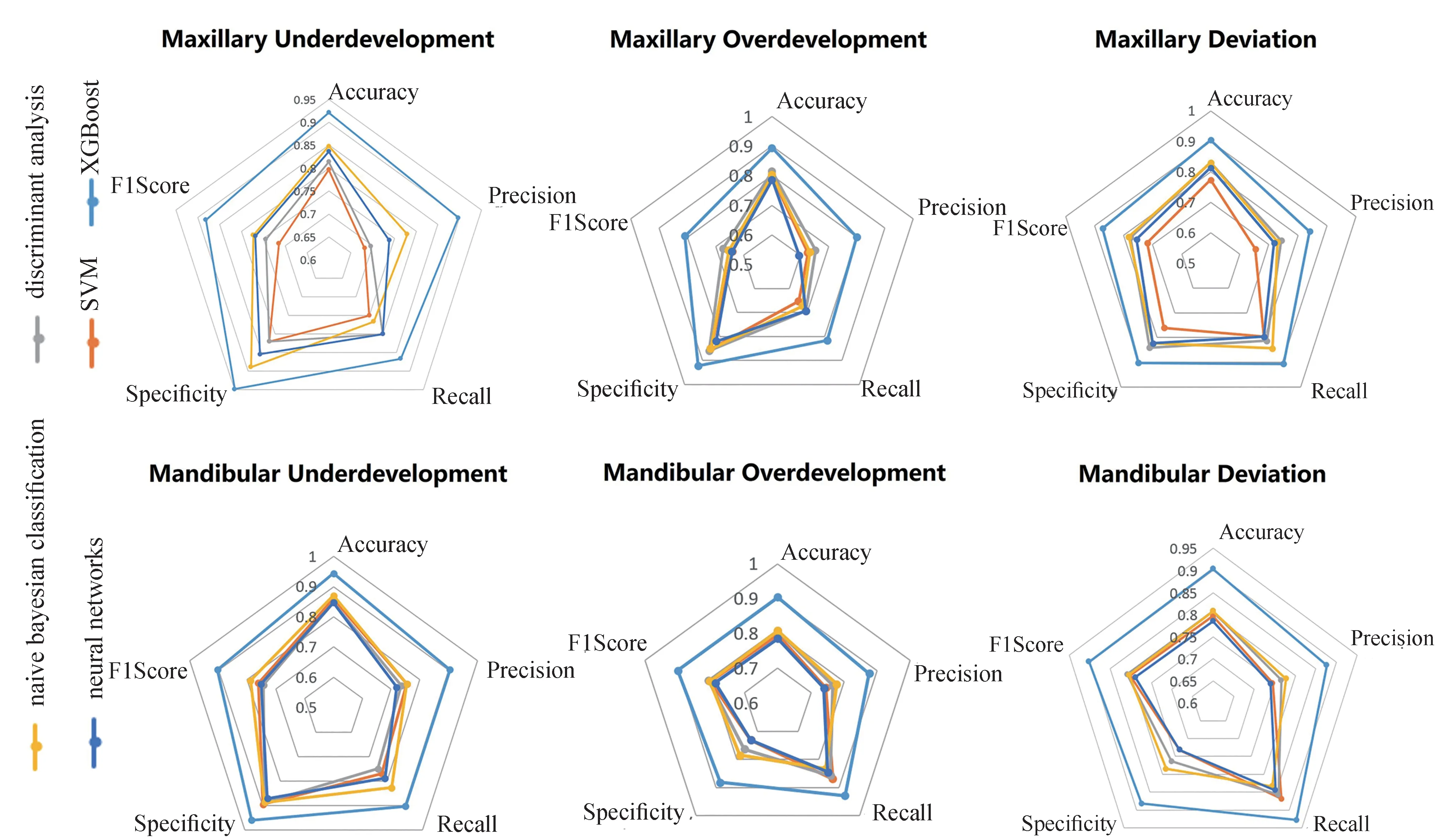
图5 XGBoost算法对不同诊断项目的准确性评价结果Fig 5 The accuracy evaluation of different diagnostic items based on XGBoost algorithm
该模型的受试者特征曲线(receiver operating characteristic curve,ROC)如图6所示,对于不同的诊断类型的曲线下面积(area under curve,AUC)均大于0.9。试验结果提示,输出的智能诊断结果相比专家诊断结果对于部分诊断类别具有较高的一致性和准确性,对临床医生有一定的参考价值。
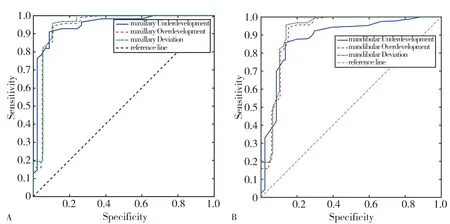
图6 判断上、下颌骨发育及偏斜情况的ROC曲线Fig 6 The ROC curve of judging the development and deviation of maxilla and mandible
3 人工智能正颌外科手术方案的自动设计
正颌手术治疗牙颌面畸形的本质,是将处于错误空间位置的上、下颌骨骨块移动到理想的位置上,从而使患者的面型和功能达到良好的状态。掌握了骨块移动的最佳位置,就掌握了设计手术方案的能力。实际临床工作中经验丰富的正颌外科医生,会结合患者软组织外貌、咬合关系、影像学检查等多种术前检查结果,基于自身长期训练获得的经验,设计手术方案[9-10]。该过程具有较强的主观性,不同医生间对于方案的选择也可能存在差异[11-12]。但目前临床仍有一些相对客观的标准,能够作为医生设计手术方案的参考,其中最常用的是头影测量和咬合关系评价指标[13]。这些指标数量众多,在调整骨块移动时,多数指标会随之发生变动。本课题组以多项三维头影测量项目的正常人群参考值区间为目标,希望通过人工智能技术找到满足临床需要的颌骨移动方案。
人工蜂群(artificial bee colony)智能算法作为一类种群智能寻优算法,被应用于各类场景下的参数寻优问题中,是机器学习算法的重要组成部分[14]。在解决参数寻优问题的过程中,人工蜂群智能算法最大的优势是在于能够泛化问题本身的特殊性及复杂性,仅对参数的优劣程度进行评估,充分发挥机器学习的效率,在迭代运算中更快地收敛,进而更为直接、有效地寻找最优的参数。课题组采用该算法实现了正颌外科手术方案的自动设计,实施流程如图7所示。

图7 基于人工蜂群算法的正颌手术方案智能设计流程Fig 7 The intelligent design of orthognathic surgery based on artificial bee colony algorithm
构建算法后设计临床试验来进行验证,共纳入患者30例,男性11例,女性19例。其中,骨性Ⅱ类错畸形患者10 例,骨性Ⅲ类错畸形20例。
该算法模型在MATLAB 7.0(MathWorks 公司,美国)软件中运行,运行算法后会自动输出对应当前患者的手术方案。
每次设计方案时根据当前患者的临床诊断问题,只移动存在问题的骨块。
最终输出的手术方案以上颌骨、下颌骨、颏的空间移动共6项数据呈现,分别为X轴方向移动距离,Y轴方向移动距离,Z轴方向移动距离,在X轴进行旋转的角度,在Y轴进行旋转的角度,在Z轴进行旋转的角度。
模拟实施不同方案后,三维头影测量和骨块空间移动的结果差异性对比如下(表1、2)。
表1 人工智能与实际方案术后头影测量结果差异性Tab 1 The difference of cephalometric results after operation between artificial intelligence design and practical design ±s
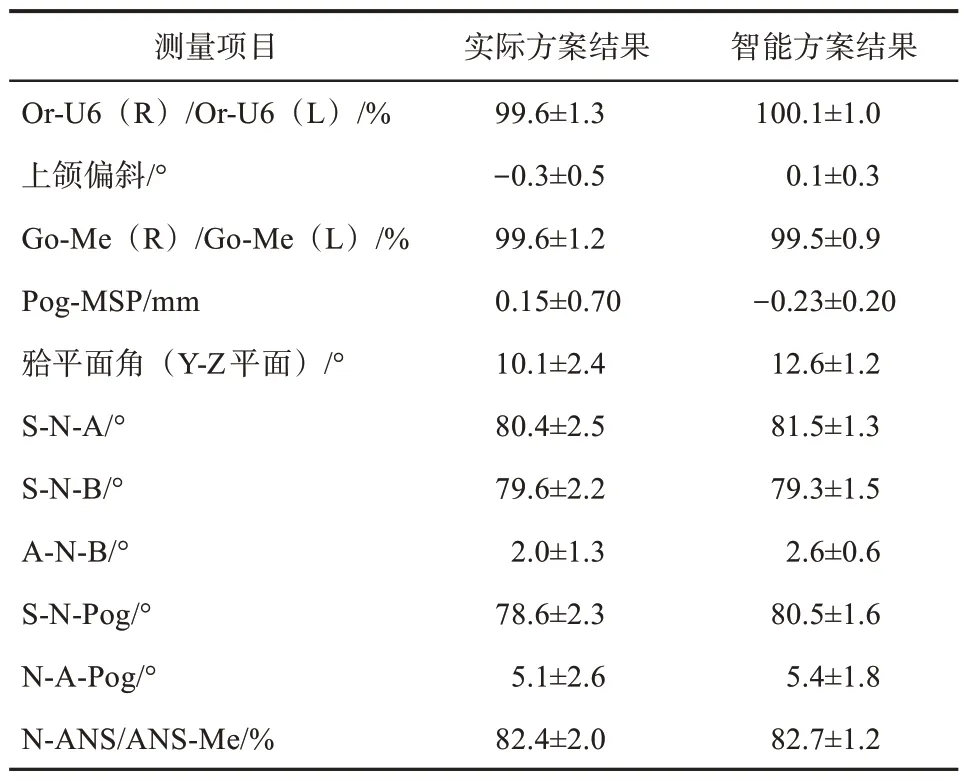
表1 人工智能与实际方案术后头影测量结果差异性Tab 1 The difference of cephalometric results after operation between artificial intelligence design and practical design ±s
注:Or-U6(R)/Or-U6(L)为眶点至右/左侧上颌第一磨牙距离比值;Go-Me(R)/Go-Me(L):左/右侧下颌角点与软组织颏下点距离比值;Pog-MSP:颏前点到正中矢状面距离;S-N-A:上齿槽座角;S-N-B:下齿槽座角;A-N-B:上、下齿槽座角;S-N-Pog:蝶鞍中心点、鼻根点与颏前点所成的角;N-A-Pog:鼻根点、上齿槽座点与颏前点所成的角;N-ANS/ANS-Me:上面高与下面高比值。
表2 统计30例患者在智能设计方案与实际方案中骨块空间移动的差异性Tab 2 The difference of spatial movement between artificial intelligence design and practical design for 30 patients±s

表2 统计30例患者在智能设计方案与实际方案中骨块空间移动的差异性Tab 2 The difference of spatial movement between artificial intelligence design and practical design for 30 patients±s
注:ΔX轴移动意为智能设计方案与实际方案在X轴方向上移动距离的差值,ΔX轴旋转意为智能设计方案与实际方案在X轴方向上旋转角度的差值,ΔY、ΔZ含义同前。
结果显示输出智能手术方案效果比较理想,差异无统计学意义,对于临床工作有一定的参考价值,可以为常见牙颌面畸形患者手术方案的制订提供参考。
4 结论
本课题组提出了一种采用迭代最近点算法的颌骨三维模型标志点自动识别方法,并验证该方法获得三维头影测量分析结果的准确性。进而通过监督学习专家诊断经验,采用XGBoost算法,实现针对牙颌面畸形患者的智能诊断。再以多项三维头影测量项目的正常人群参考值区间为目标,采用改良人工蜂群算法,通过移动骨块实现颌骨及附着其上标志点发生位移,实现正颌外科手术方案的自动设计,结果显示输出智能手术方案效果比较理想,对于临床工作有一定的参考价值,可以为常见牙颌面畸形患者手术方案的制订提供参考。
综上所述,笔者利用人工智能技术开发了一套针对牙颌面畸形患者的诊断及手术方案设计系统,该系统在初步临床验证试验中表现出较好的结果。在进一步优化算法,整合整个算法流程后,有望进入正颌外科实际临床工作中,辅助医生对牙颌面畸形的诊疗工作。
利益冲突声明:作者声明本文无利益冲突。
