面向无人艇雷达图像的连通区域标记改进算法
2022-03-16潘选任王冬姣叶家玮
潘选任, 王冬姣, 叶家玮
面向无人艇雷达图像的连通区域标记改进算法
潘选任, 王冬姣, 叶家玮
(华南理工大学 土木与交通学院, 广东 广州, 510640)
搭载雷达的无人艇在水域中航行时, 通过雷达扫描水域附近的环境以识别无人艇周围的障碍物, 为了区分雷达图像中的障碍物, 通常采用连通区域标记算法对不同障碍物进行标记。由于杂波对雷达成像的干扰, 造成雷达图像中像素点增加, 使用常见的算法处理图像时效果不佳, 为此, 提出一种改进算法, 在常见算法的基础上增加去除杂波像素点的功能, 并标记出图像中的最大障碍物。经过实验分析后可知, 相比于改进前的算法, 改进后的算法减少了标记的区域数量, 处理后的雷达图像更加平滑, 便于无人艇对最大障碍物进行预警以及采取合理的避碰措施。
无人艇; 雷达图像; 障碍物; 连通区域标记算法
0 引言
无人艇由于体积小、成本低、活动区域广、雷达反射面积小等优势越来越被广泛关注, 目前主要用于航道测量、海洋环境监测等领域[1]。无人艇通常依靠雷达来获取可靠的航路信息, 保证其在复杂的水域环境中安全航行, 并完成各种航行任务。
由于雷达扫描的原始图像有很多杂波, 不方便岸站进行观察, 调大雷达增益又会使雷达图像上障碍物的扫描范围缩小, 增加无人艇的碰撞危险, 因此采用连通区域标记算法对雷达扫描所得的图像进行处理, 便于岸站区分障碍物, 及时采取避碰措施。
目前许多文献对图像处理和连通区域标记算法进行了研究。汪劲希等[2]通过线段表连通域原理对二值化后的海天线图像进行检测, 以提取海天线的非线性边缘信息。田守东[3]采用8邻域连通, 完成对雷达图像中目标的识别, 标记出图像中所有连通区域, 不受区域形状的影响。王凯等[4]在传统连通区域算法的基础上, 采用图像分块的改进方法, 减少了数据处理量, 提高了抗噪性。谢宜壮等[5]提出一种新的连通域标记算法, 通过增加虚警剔除, 减小控制逻辑的复杂性, 使新算法在速度和性能上更具有优势。
采用一般的图像处理算法处理雷达图像时, 由于杂波的影响, 处理后的图像效果较差。文中对现有算法进行改进, 挑选合适的阈值处理图像, 将不同的障碍物提取出来并进行标记, 使改进后的算法不仅适用于处理雷达图像, 而且增加了提取最大障碍物的功能, 便于岸站对无人艇附近最具威胁的障碍物进行预警。
1 雷达图像
选用图1所示的Broadband 3G雷达作为艇载雷达, 该型雷达高24 cm, 重7.5 kg, 采用12/24 V直流电压供电, 工作功率为18 W, 工作温度为–25℃~44℃, 能短时间内开机且无需预热, 完全满足无人艇的需求。

图1 雷达设备
艇载雷达通电后将信号接口与路由器相连接, 路由器向外发射Wi-Fi信号, 岸站接收路由器发射的信号后, 就可以在提供的软件界面上显示雷达图像。如图2所示, 红色部分为障碍物, 雷达回波信号最强, 黑色部分为背景, 无雷达回波信号。

图2 雷达扫描图像
2 连通区域分析
连通区域分析是指将雷达图像中的各个连通区域找出并标记, 是图像处理工作中所使用的主要预处理方法[6]。连通区域分析处理的对象通常是一张二值化后的图像, 二值图像的亮度值只有2个状态: 黑(背景像素为0)和白(目标像素为255)[7]。通过对二值图像中白色像素(目标)的标记, 让每个单独的连通区域形成一个被标识的块, 就是连通区域分析。
图像的连通区域是指图像的最大连通子集中的所有元素都是前景像素的区域。例如图3中有5个连通区域。

图3 二值图像与标记

连通性的准则有以下2种: 如果2个像素点1(1,1)和2(2,2)满足

即1和2是4邻接的, 此情况下, 1个像素有4个像素与其邻接, 如图4(a)。如果2个像素点坐标1(1,1)和2(2,2)满足

即1和2是8邻接的, 此情况下, 1个像素有8个像素与其邻接, 如图4(b)。图4中标号为的像素是像素的索引号为的邻居, 以P表示[8]。

图4 2种邻接方式
3 连通区域标记算法
常见的连通区域分析算法有2种: 2遍扫描法(Two-Pass)和种子填充法(Seed-Filling)。2遍扫描法是由Rosenfeld[9]提出的经典连通区域标记算法, 该算法是对二值图像进行2遍扫描以确定连通区域, 扫描顺序为从左到右, 从上到下[10]。种子填充法来源于计算机图形学[11], 常用于对某个图像进行填充。算法的思路为: 选取1个前景像素点作为种子, 然后根据连通区域的2个基本条件(像素值相同、位置相邻)将与种子相邻的前景像素合并到同一个像素集合中, 最后得到的该像素集合则为一个连通区域。
3.1 种子填充改进算法
由于2遍扫描法需要对图像扫描2遍, 而种子填充算法只需要扫描1遍即可完成对连通区域的像素标记[12], 因此文中对种子填充算法进行改进。改进前的算法[13]流程如图5所示。
改进前的算法采用4邻接的方式处理图2中雷达扫描所得的图像, 最后的处理结果如图6所示。图中, 图像正上方的连通区域有1块没有标记完成, 而且有很多杂波形成的细小区域, 不便于观察。
由于8邻接方式更加全面, 有更好的通用性, 因此改进算法扩大到8邻接进行分析。改进后的算法先处理二值图像中的杂波, 然后完成对连通区域的轮廓跟踪及标记, 最后提取图像中的最大连通区域。算法流程如图7所示。
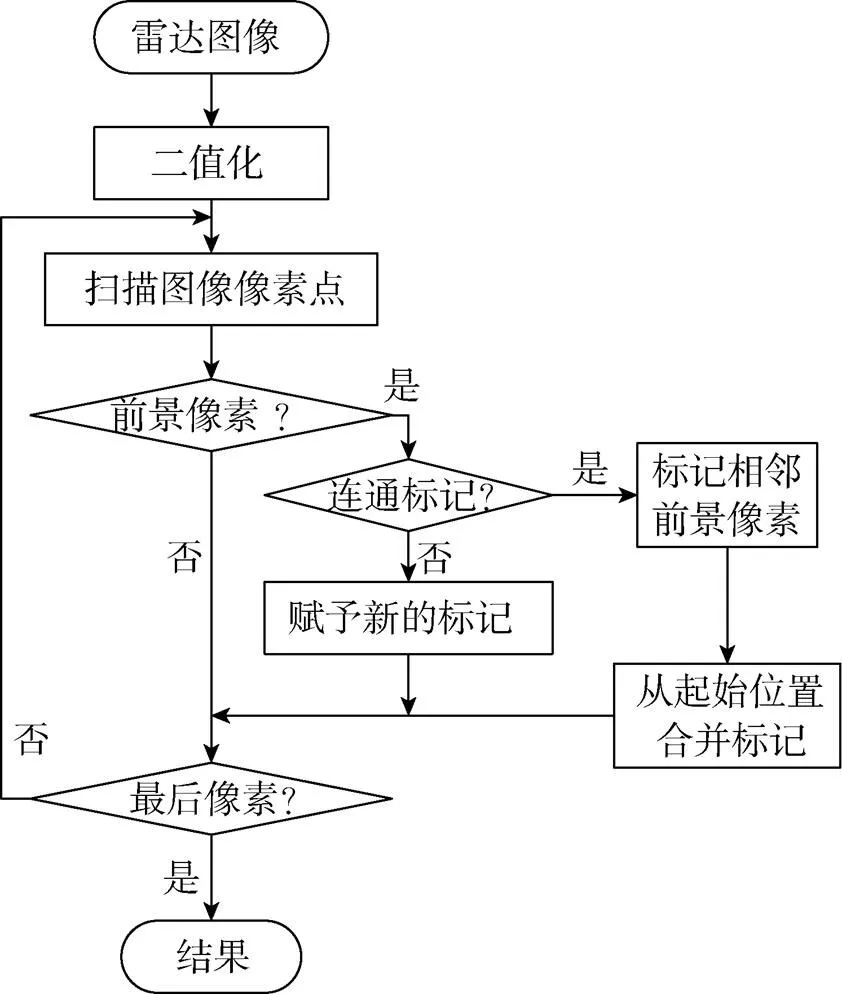
图5 改进前的算法流程

图6 改进前算法所得图像
3.2 二值图像阈值选取
雷达图像一般包括目标物体、背景和噪声,要想从多值的数字图像中直接提取出目标物体, 常用的方法就是阈值分割法。使用阈值分割法前需要对图像进行二值化处理, 即将图像上的像素点的亮度值设置为0或255, 使整个图像呈现出只有黑和白的明显的视觉效果。然后利用图像中需提取的目标与背景在亮度上的差异, 通过设定阈值将像素级分成若干类, 从而实现目标与背景的分离[14]。


图7 改进后的算法流程

当原始图像的某个像素点大于或等于阈值时, 将此像素点标记为目标像素(像素值为1), 当原始图像的某个像素点低于阈值时, 将此像素点标记为背景像素(像素值为0)。
在图2所示的雷达图像中有明显的目标和背景, 灰度直方图呈双峰分布, 如图8所示, 因此, 可采用固定阈值法进行阈值选取。
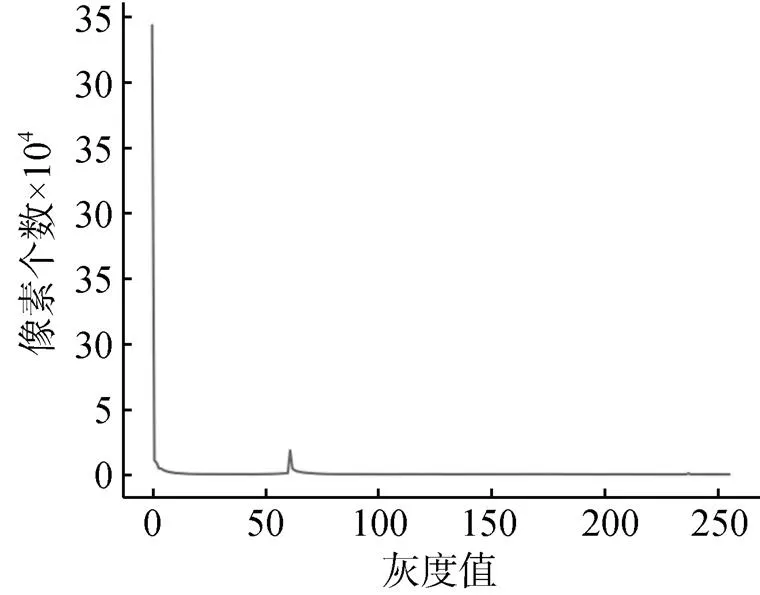
图8 雷达图像灰度直方图
选取两峰之间的谷底对应的灰度级作为阈值, 此时阈值=30, 大于阈值的作为前景, 小于阈值的作为背景, 从而完成目标和背景的分离。最终图像的二值化处理结果如图9所示。

图9 二值化后的图像
选取固定阈值对图像进行二值化处理后, 将图像中阈值低于100的连通区域反转为背景像素,以去除图像中剩余的许多小的连通区域和杂波,提升算法处理图像的速度, 快速标记图像中的障碍物, 去除后的图像更加平滑, 如图10所示。

图10 去除杂波后的图像
3.3 轮廓跟踪
图像连通区域的标记通过轮廓跟踪完成。轮廓跟踪就是如何根据当前的轮廓点, 找到下一个轮廓点, 存在以下2种情况: 根据图4, 若当前的轮廓点是第1个轮廓点, 那么从与当前点邻接的左上点5开始按顺时针方向扫描它的邻居, 第1个遇到的前景像素就是下一个轮廓点; 若当前的轮廓点不是第1个轮廓点, 那么假如上一个轮廓点是当前轮廓点的邻居P, 那么从P+2开始按顺时针方向扫描当前轮廓点的邻居, 第1个遇到的像素点就是下一个轮廓点[8]。
首先从轮廓的第1个像素点左上的邻居5开始按顺时针方向扫描它的邻居。若当前像素点的所有邻居都是背景像素, 即当前像素点是一个孤立的点, 则停止跟踪并返回0, 否则第1个遇到的前景像素点即为下一个轮廓点。若当前轮廓点不是第1个轮廓点, 则先检查当前轮廓点的标签, 如果当前点已经标记且不是最新标签(假设当前点的标签为),则提前终止跟踪并返回。假如上一个轮廓点是当前轮廓点的邻居P, 那么从P+2开始按顺时针方向扫描当前轮廓点的邻居, 首先遇到的前景像素点就是下一个轮廓点。如果当前点是起始点并且下一个点是第2点, 则轮廓跟踪算法程序结束, 返回0[8]。
通过轮廓跟踪得到图像中的所有连通区域后, 给不同的连通区域随机分配不同的颜色进行标记。标记结果如图11所示。

图11 连通区域标记
3.4 最大连通区域提取
通过读取雷达的二值图像, 将各连通区域标记颜色, 统计各区域的颜色数量, 求取最多颜色数量区域, 并把该区域标为255, 其他的标为0, 就能提取出图像的最大连通区域, 如图12所示, 此时提取出的最大连通区域在雷达的右侧, 因此无人艇在航行时需要密切关注右侧的障碍物。

图12 最大连通区域提取图像
4 实验验证
将雷达置于无人艇模型(简称船模), 在室外空地测试接收雷达图像, 实验环境如图13(a)所示, 船模的正前方置有1艘双体船。雷达扫描图像如图13(b)所示, 图像正上方的一块红色障碍物即为双体船。
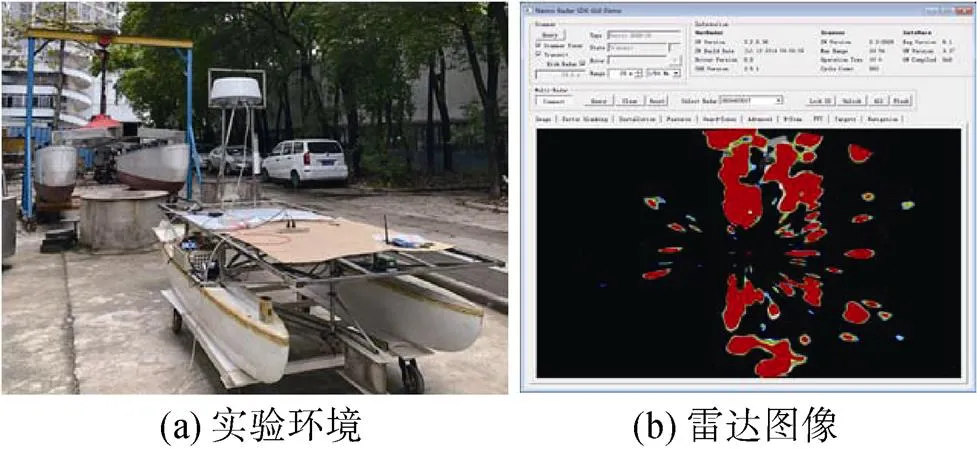
图13 实验环境及障碍物雷达图像
在VS2017软件以及Opencv2.7.0环境中编写改进的种子填充算法程序, 验证算法的有效性。程序运行后可得到二值化后去除杂波的图像、连通区域标记图像以及最大连通区域提取图像, 如图14所示。
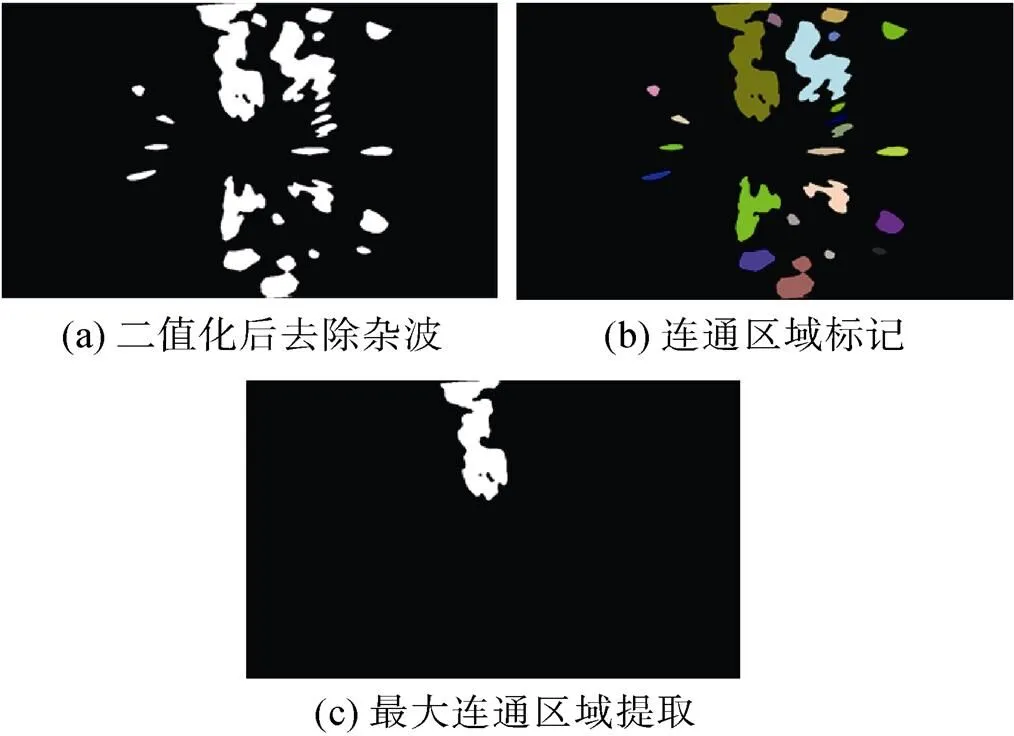
图14 经改进程序处理后的障碍物图像
由图14(a)可以看到, 与原始雷达图像相比, 部分小的区域和杂波已被去除, 雷达图像更加平滑; 图14(b)将雷达扫描的所有障碍物标记为不同的颜色, 可更好地观察周围的障碍物; 图14(c)将图像中的最大障碍物提取出来, 即正前方的双体船, 提醒岸站特别注意, 需要采取转向措施避开前方的船舶。
将船模右转后, 正前方的双体船位于船模的左侧, 此时的实验环境及雷达图像如图15所示。在雷达的界面上可以看到左侧有一块大的红色障碍物, 此时运行程序得到图16所示3幅图像。
根据图16(c)可知, 船模转向后程序提取的最大障碍物位于左侧, 即双体船所在的位置。
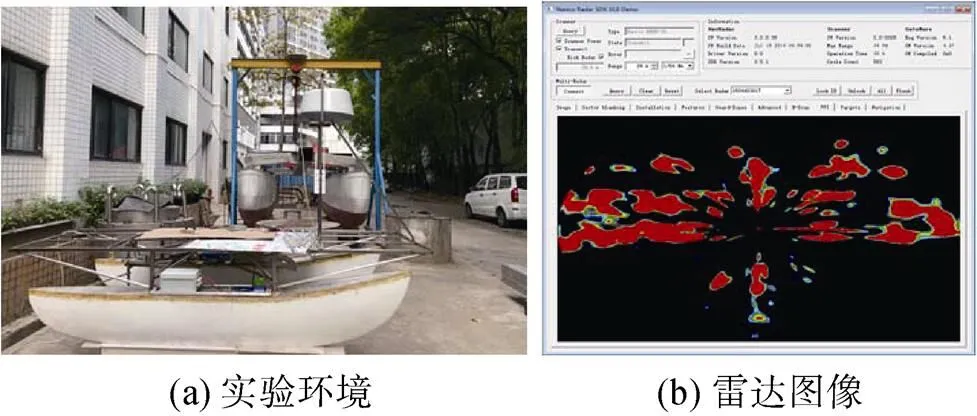
图15 船模右转实验环境及雷达图像

图16 经改进程序处理后的船模右转图像
通过上述实验验证了改进后的算法能有效处理雷达图像, 并能提取图像中的最大障碍物, 为无人艇采取合理的避碰措施提供参考。
将改进前算法与改进后算法的处理效果进行对比, 选取图2、图13(b)和图15(b)所示的3幅雷达图像作为处理对象, 对比算法改进前后连通区域的标记数量以及计算程序的运行速度, 结果如表1和表2所示。
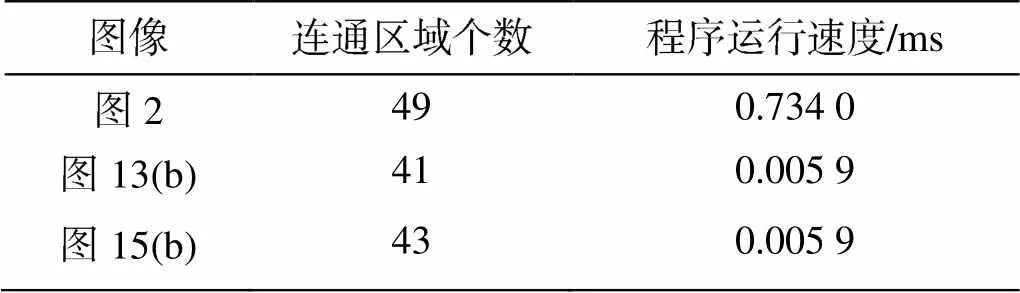
表1 改进前算法的运行结果

表2 改进后算法的运行结果
对比可知, 相比于改进前的算法, 算法改进后, 减少了图像的噪声和杂波, 使雷达图像的连通区域的标记数量减少, 在一定程度上提高了算法的运行速度。
5 结束语
文中通过对连通区域分析中的种子填充算法进行改进, 去除了雷达图像中的杂波和小的连通区域, 减少了算法标记的数量,并能够提取雷达图像中的最大障碍物。相比于原始算法的处理结果, 改进后算法标记的障碍物数量减少, 缩短了图像处理的时间, 通过实验观测到的雷达图像更为平滑, 且更为直观地观察到无人艇周围的最大障碍物。因此改进后的算法在无人艇航行时, 能有效处理雷达图像, 并对周围的最大障碍物进行预警。
文中仅对雷达图片进行了静态分析, 但无人艇在水面航行时, 需要对雷达扫描后的图像进行实时的分析处理, 以判断无人艇前方或周围最具威胁的障碍物, 做出适当的避碰操纵指令, 如何动态持续地的处理雷达图像是有待进一步开展的工作。
[1] 郑烈心.水面无人艇建模与运动控制系统设计[D].广州: 华南理工大学, 2016.
[2] 汪劲希, 燕肇一, 彭真明.复杂背景下海天线的连通域检测法[J].舰船科学技术, 2016(8): 108-112.
Wang Jin-xi, Yan Zhao-yi, Peng Zhen-ming.A Sea-Sky- Line Detection Algorithm Based on the Method of Conne- cted Area Detection Under Complicated Background[J].Ship Science and Technology, 2016, 38(8): 108-112.
[3] 田守东.基于雷达图像的目标检测技术研究[D].哈尔滨: 哈尔滨工程大学, 2010.
[4] 王凯, 黄山, 赵瑜, 等.面向图像目标提取的改进连通域标记算法[J].计算机工程与设计, 2014, 35(7): 2438- 2441.
Wang Kai, Huang Shan, Zhao Yu, et al.Improved Algori- thm of Connected Component Labeling for Image Targets Extraction[J].Computer Engineering and Design, 2014, 35(7): 2438-2441.
[5] 谢宜壮, 谭许彬, 陈禾.一种新的连通域标记算法[J].北京理工大学学报, 2012, 32(12): 1273-1278.
Xie Yi-zhuang, Tan Xu-bin, Chen He.A New Algorithm for Connected Components Labeling[J].Transaction of Beijing Institute of Technology, 2012, 32(12): 1273-1278.
[6] 左文明.连通区域提取算法研究[J].计算机应用与软件, 2006, 23(1): 97-98.
Zuo Wen-ming.Study on Connected Regions Extraction[J].Computer Applications and Software, 2006, 23(1): 97-98.
[7] 左敏, 曾广平, 涂序彦, 等.基于等价对的图像连通域标记算法[J].计算机仿真, 2011, 28(1): 14-16, 50.
Zuo Min, Zeng Guang-ping, Tu Xu-yan, et al.A Connected Domain Labeling Algorithm Based on Equivalence Pair in Binary Image[J].Computer Simulation, 2011, 28 (1): 14-16, 50.
[8] 张云哲, 赵海, 宋纯贺, 等.一种新的连通区域标记算法[J].计算机应用研究, 2010, 27(11): 4335-4337, 4340.
Zhang Yun-zhe, Zhao Hai, Song Chun-he, et al.New Me- thod for Component-Labeling in Binary Image[J].Application Research of Computers, 2010, 27(11): 4335-4337, 4340.
[9] Rosenfeld A.Sequential Operations in Digital Picture Processing[J].Journal of the ACM, 1996, 13(4): 471-494.
[10] 沈夏炯, 段晓宇, 原万里, 等.基于连通区域标记算法的圆检测算法的研究[J].计算机工程与应用, 2018, 54 (21): 95-98.
Shen Xia-jiong, Duan Xiao-yu, Yuan Wan-li, et al.Research on Circle Detection Algorithm Based on Connected Region Labeling Algorithm[J].Computer Engineering and Applications, 2018, 54(21): 95-98.
[11] 覃方涛, 房斌.GPU加速的二值图连通域标记并行算法[J].计算机应用, 2010, 30(10): 2774-2776.
Qin Fang-tao, Fang Bin.GPU Accelerated Parallel Labe- ling Algorithm of Connected-Domains in Binary Images [J].Journal Computer Applications, 2010, 30(10): 2774- 2776.
[12] 张国和, 徐快, 段国栋, 等.一种适于硬件实现的快速连通域标记算法[J].西安交通大学学报, 2018, 52(6): 95-101.
Zhang Guo-he, Xu Kuai, Duan Guo-dong, et al.A Fast Labeling Algorithm of Connected Components Applicable for Hardware Implementation[J].Journal of Xi’an Jiao- tong University, 2018, 52(8): 95-101.
[13] Robert L.OpenCV 2 Computer Vision Application Programming Cookbook[M].Birmingham: Packt Publishing, 2011.
[14] 雷建锋, 汪伟.基于OpenCV的图像阈值分割研究与实现[J].现代电子技术, 2013, 36(24): 73-76.
Lei Jian-feng, Wang Wei.Research and Implementa- tion of Image Threshold Segmentation Based on OpenCV[J].Modern Electronics Technique, 2013, 36(24): 73-76.
Improved Algorithm of Connected Component Labeling for Unmanned Surface Vehicle Radar Images
PAN Xuan-ren, WANG Dong-jiao, YE Jia-wei
(College of Civil and Transportation Engineering, South China University of Technology, Guangzhou 510640, China)
When an unmanned surface vehicle(USV) equipped with a boat-borne radar navigates the water, the radar scans the environment near the water, and the radar image is used to identify the obstacles around the USV.To distinguish different obstacles, a connected component labeling algorithm is used to mark different obstacles in the radar image.Owing to the interference from clutter on radar imaging, the pixels in the radar image increase; thus, the results obtained from traditional algorithms to process the image are inadequate.Therefore, an improved algorithm is proposed to improve the function of removing the clutter pixels based on conventional algorithms and mark the biggest obstacle in the image.Compared with the traditional algorithm, the improved algorithm reduced the number of marked areas, and the processed radar images are smoother, which is convenient for the USV to detect the largest obstacle early such that avoidance maneuvers can be performed.
unmanned surface vehicle(USV); radar image; obstacle; connected component labeling algorithm
潘选任, 王冬姣, 叶家玮.面向无人艇雷达图像的连通区域标记改进算法[J].水下无人系统学报, 2022, 30 (1): 78-84.
U674.91; U665.22
A
2096-3920(2022)01-0078-07
10.11993/j.issn.2096-3920.2022.01.010
2021-01-18;
2021-03-19.
广东省科技项目(2015B010919006).
潘选任(1995-), 男, 在读硕士, 主要研究方向为新型船舶与海洋结构物制造.
(责任编辑: 杨力军)
