基于泵喷整流机理的螺旋桨空化抑制研究
2022-03-16赵晓宇武天龙林兴华武建国张敏革
赵晓宇, 武天龙, 林兴华, 武建国, 张敏革
基于泵喷整流机理的螺旋桨空化抑制研究
赵晓宇1,2, 武天龙1,2, 林兴华1, 武建国1, 张敏革2
(1.河北工业大学 机械工程学院, 天津, 300130; 2.天津瀚海蓝帆海洋科技有限公司, 天津, 300130)
为抑制水下推进器螺旋桨空化的形成, 提高其水动力性能, 基于泵喷整流机理, 以导管螺旋桨推进器为研究对象, 分别设置前置定子和后置定子, 利用计算流体力学仿真分析和实验的方法, 研究了前、后定子对导管推进器的空化抑制、扭矩平衡及推进效率等方面的影响。研究结果表明, 前置定子对空化抑制效果明显, 相对弯度对提高推进效率的影响显著, 能够平衡部分横滚扭矩; 后置定子对抑制螺旋桨尾流区的空化效果明显, 剖面弦径比和安装位置对提高推进器效率和扭矩平衡具有最优值。因此可以通过在导管螺旋桨上加装合适的前后定子, 降低螺旋桨的噪声等级, 优化螺旋桨的空化性能, 提高水动力性能, 为类泵喷推进器的结构设计提供参考。
水下推进器; 空化抑制; 计算流体力学; 泵喷; 整流
0 引言
螺旋桨在高速运转时, 其桨叶会对水流造成扰动, 从而形成涡旋涡振现象, 若螺旋桨的转速继续增加, 其周围水流的能量会从压力能迅速转换为动能, 使其动能升高, 压强降低。当螺旋桨周围流体的压强降低到水的饱和蒸气压以下时, 将会出现空化现象[1-6]。空化现象产生的空化气泡随着水流进行运动, 当遇到高压区或障碍物后会产生溃灭, 其特殊的内爆特性使其溃灭时产生巨大的能量。空化气泡的溃灭会对水下螺旋桨推进器产生一系列的危害, 比如导致螺旋桨加速腐蚀、加剧推进器的振动、提高水动力噪声等。
温亮军[7]和齐江辉[8]等通过改变桨叶侧斜、纵倾角以及桨叶剖面等参数来研究螺旋桨空化性能, 发现通过优化设计桨叶剖面可以有效减少桨叶的空泡面积, 提高螺旋桨抗空化能力。李生[9]和彭云龙[10]等分别对带有前置或后置定子的螺旋桨所建立的空化模型进行空化特性数值分析, 发现空化数小于3时, 空化区域将快速扩散到整个桨叶面, 螺旋桨的推进效率逐渐降低。有学者利用大型空化水槽对螺旋桨空化噪声的预测方法进行研究, 实验验证了标度法可有效预测螺旋桨空化噪声[11-13]。Yilmaz等[14]利用自适应网格法对名为The Princess Royal的船用螺旋桨叶尖涡空化起始和消失进行研究, 采用计算流体动力学(computational fluid dynamics, CFD)方法, 针对特定参数的螺旋桨进行空化试验以验证仿真数据的准确性, 但并未对空化起因与抑制空化方法进行深入研究。以上研究的出发点均基于研究螺旋桨参数特性来优化水动力性能, 以达到抑制空化的目的, 抑制效果不理想。
空化气泡从产生到溃灭的时间很短, 在复杂流场结构中很难清楚地观察到流场内部情况, 使得螺旋桨的空化流场结构及空化气泡的动力学性能存在盲区。CFD是一种以计算机计算为基础, 对流体传质传热等现象进行分析的方法[15-17]。随着计算机计算性能的逐渐提升, CFD中的网格生成技术、算法、湍流模型等得到了巨大的发展, 在降低研究成本、提高科研效率的前提下可以对复杂流场进行仿真计算, 并且对于研究流场结构等微观问题而言, CFD也是唯一可靠的求解方法[18]。
由于泵喷推进器是由环状导管、前后置定子与螺旋桨所组成的推进装置, 其中带有翼型的前置定子可以使水流产生预旋, 带有翼型的后置定子可以回收尾流中旋转的能量, 故基于上述的泵喷整流机理, 在水下推进器添加特定的前、后置定子使其变为类泵喷推进器, 并利用CFD仿真分析研究类泵喷推进器中螺旋桨在泵喷整流机理中抑制空泡的效果, 提出一种有效抑制空化气泡产生以及减小水下推进器噪声的方法, 为抑制螺旋桨空化提供更为有效的途径。
1 模型构建
1.1 几何模型构建与描述
以Whale1212水下推进器为研究对象, 如图1所示, 该标准型号推进器由密封舱、桨轴、螺旋桨、导管和支撑杆组成, 结构优化后的深海推进器在标准型号的基础上增加了前置定子与后置定子。

图1 水下推进器结构示意图
该水下推进器的螺旋桨采用带有侧斜的D型导管桨系列结构, 如图2所示。

图2 水下推进器螺旋桨结构示意图
图中, 螺旋桨的螺距分布由叶梢向叶根逐渐减小, 叶梢部分具有一定的弦长, 同时为了延迟梢部空泡的产生, 对梢部的导边和随边没有进行倒圆处理, 因为水流通过未倒圆处理的倒边与随边后不会进行分离, 减少了水流的紊乱, 其余参数如表1所示。

表1 水下推进器螺旋桨参数
所选导管为DSN系列结构加速型导管, 这一系列的导管由于具有较大的导管口面积, 因此在重载情况下具有较高的推进效率。导管与螺旋桨之间的间隙小于1 mm, 与支撑杆为一体加工, 可保证装配的同轴性。导管剖面参数如表2所示。

表2 水下推进器导管参数
所选前置定子和后置定子均为NACA翼形剖面结构(由咨询委员会(National Advisory Committee for Aeronautics, NACA)开发的系列翼型), 后置定子为“十”字交叉结构。
1.2 数值模型构建与描述
采用CFD商业软件Fluent 14.0对上述螺旋桨推进器的流场结构进行仿真, 借助非定常的雷诺平均(Reynolds averaged Navier-Stokes, RANS) 模型对流场的连续性方程和动量方程进行求解



在分析过程中, 忽略气液两相之间的速度滑移, 采用Rayleigh-Plesset方程对空化气泡的增长和溃灭过程进行如下描述




2 螺旋桨空化分析
2.1 螺旋桨空化分布特性分析
采用CFD对上述推进器用的螺旋桨流场结构和水动力性能进行分析。图3所示是为下文中优化抑制方案提供优化依据的基准态结构。

图3 螺旋桨基准态结构示意图
采用Gambit前处理软件对螺旋桨的几何模型进行网格划分, 模型中的流域根据螺旋桨旋转时的特点分为两大部分: 靠近螺旋桨的动域fluid-1和远离桨的静域fluid-2, 其中动域为圆柱形, 静域为测试水箱的长方体。在网格划分过程中, 针对螺旋桨的表面和导流罩的表面进行网格加密处理, 对fluid-1和fluid-2分别采用递增函数fun-1和fun-2来进行网格划分, 使得靠近螺旋桨旋转区域的网格尽量细腻, 以保证计算的精度。远离计算区域内的网格稍微大些, 节约计算时间。在边界条件的定义中, fluid-1中的上表面为速度进口, 下表面为自由出口, 侧面为刚性壁面; fluid-2中螺旋桨和导流罩的表面均为刚性壁面, 其余各面默认为内部面。


图4 气相体积比率分布云图
由图4可知, 螺旋桨周围的空化气泡主要集中在叶梢和尾流区域, 其中气相体积比率如式(7)所示。通过对叶梢部位的压力系数分布云图(如图5所示)分析可知, 该区域存在明显的低压区, 这是由于螺旋桨的转速最大时, 叶梢区域的压力能转换成动能, 此时负载最大, 压强随之降低。

图5 压力系数分布云图

通过对尾流区域的流场结构(见图6)分析可知, 水流在桨毂处的收缩作用下形成涡旋, 在涡旋的中心位置处产生空洞区, 造成压强降低。
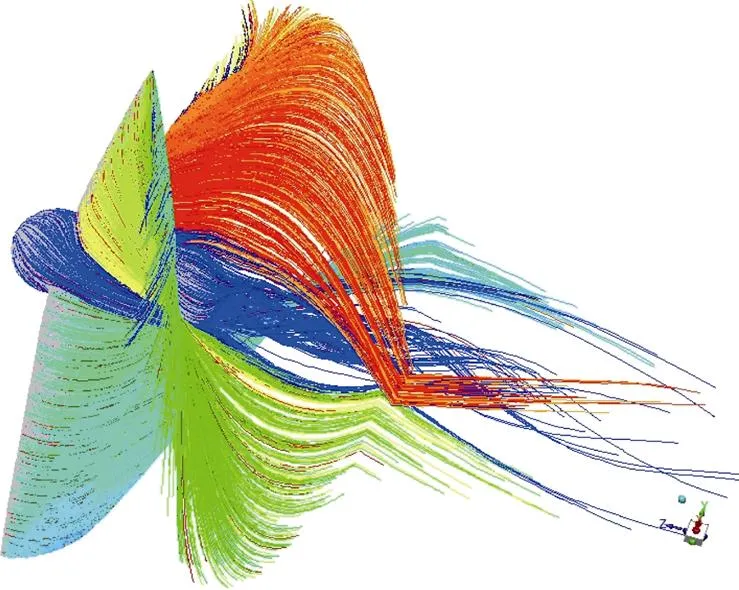
图6 尾流流场结构示意图
由此可知, 抑制螺旋桨的空化, 需要对叶梢和尾流2个区域的流场进行优化, 主要措施包括:
1) 对螺旋桨桨叶前面的流场进行预旋处理, 降低叶梢部位的负载, 减缓能量转换的程度;
2) 对螺旋桨桨毂后面的流场进行整流处理, 破坏桨毂后面的涡旋, 将流场的周向运动转换为轴向运动。
2.2 前置定子影响特性分析
通过在螺旋桨前面设置前置定子替换支撑杆, 实现对进入导管的水流进行预处理。采用剖面为NACA翼形的前置定子, 改变翼形的拱度比, 分析不同定子结构对螺旋桨的空化性能和水动力性能的影响。首先采用NACA-0424剖面结构的定子(如图7所示), 分析在不同转速下叶梢部位空化区域的强度(如图8所示)。

图7 添加前置定子结构示意图

图8 不同转速空化比率图


这是由于前置定子对进入导管的水流进行了重新梳理, 使其到达螺旋桨的流线为均匀流, 如图9所示, 从而使得该区域的涡旋减弱, 避免了空化区域的出现。

图9 添加前置定子的流场示意图
图10为该区域的压力系数分布云图, 由此可以分析出, 与基准态相比, 低压区的压强明显升高, 压力分布也比较均匀。

图10 添加前置定子的压力云图

图11 前置定子翼型示意图

图12 螺旋桨空化抑制图
2.3 后置定子影响特性分析


图13 尾翼结构示意图
以3 kn进速, 2 800 r/m时螺旋桨的工况为例(如图14和图15所示)。

图14 推进器扭矩随尾翼弦径比变化曲线

图15 推进器效率随弦径比变化曲线

图16 推进器尾流示意图

图17 空化抑制率随弦径比变化曲线
通过改变螺旋桨尾端与尾翼前端的距离, 对尾翼的最优位置进行优化分析。设定距离比分别为0.2、0.5和0.8三种方案, 推进器的总扭矩和效率对比分别如图18和图19所示。由图18可以看出, 当距离比为0.2时, 推进器整体扭矩最小, 说明尾翼能够抵消的扭矩最大。随着距离的增大,所抵消的扭矩基本相等。由图19可以看出, 尾翼的安放距离对推进器的效率影响不大。

图18 推进器扭矩随尾翼距离变化对比图

图19 推进器效率随尾翼距离变化对比图
由图20可知, 随着距离比的增大, 空化抑制率也随之增大, 这是由于螺旋桨与后置定子间的间隙增大, 收缩区域增大, 使得低压空化区增大。

图20 推进器效率与空化抑制率变化对比图
3 螺旋桨水动力实验分析
3.1 PIV实验环境与方法
实验在天津科技大学的粒子图像测速(par- ticle image velocimetry, PIV)流体力学实验室中进行, 图21为实验结构示意图。水槽总长度为3.0 m, 拍摄区域段长为1.5 m, 宽为1.0 m, 高为0.7 m, 深海推进器固定在水箱的前半段区域, 在不影响深海推进器进流的情况下, 留出足够的观测尾流区域, 距离水面0.3 mm。

图21 实验装置示意图
Whale1212型深海推进器与测试水箱之间通过铝型材进行固定连接, 如图22所示。深海推进器的导管与支撑杆均为3D打印的透明材质, 在不影响流场的前提下对螺旋桨叶梢流场与尾流进行更加准确的拍摄与分析。

图22 深海推进器固定示意图
流体介质所选示踪粒子的直径为10 μm, 粒子密度为1 030 kg/m3, 实验环境温度为15℃。先通过高速相机拍摄水箱内的粒子浓度, 再根据拍摄效果进行示踪粒子添加量的调节, 最终使其
浓度满足PIV实验的工作要求。数据采集装置采用的是美国TSI公司提供的PIV系统, 主要部件为激光器与高速相机。采用双帧双曝模式对图像进行采集后, 再利用自带系统对采集图像进行相互算法的处理, 得到瞬时速度场中的速度矢量图, 并通过Tecplot软件对速度矢量图进行可视化处理得到速度场云图。
3.2 PIV实验与仿真对比分析
对Whale1212型号深海推进器进行PIV实验, 得到深海推进器工作时的螺旋桨尾流速度云图, 如图23所示。在相同转速下, 通过CFD流体仿真软件获得螺旋桨仿真速度场分布云图, 如图24所示。比较可知, 2个速度云图特征大致相同, 在水流通过导管外部时颜色为深蓝色, 说明此处的流场缓慢而稳定; 当水流通过导管内部时, 整体速度呈加快的趋势; 当水流通过导管内部后, 整体速度逐渐缓慢并成扩散状向周围散去, 最终与桨后静水区碰撞形成漩涡。

图23 螺旋桨PIV实验速度场分布云图

图24 螺旋桨仿真速度场分布云图
通过观察1号区域与2号区域可以发现: 当水流通过导管内部时, 水流速度逐渐增加, 在接触螺旋桨桨叶时水流速度达到最大, 越靠近叶梢部分的水流速度越大, 越靠近桨毂部分水流速度越低; 水流通过螺旋桨后, 在螺旋桨的后面形成喷射状, 越靠近桨叶中心位置的水流速度越快, 越靠进导管与桨毂位置的水流速度越慢; 水流通过螺旋桨后与桨毂尾流相交时, 其速度场分布云图中的速度边界层变成明显的波浪形状, 随着尾流远离桨叶, 波浪由大变小直至消失不见。
3.3 计算结果验证


图25 水下推进器测试示意图
采用CFD方法对螺旋桨推进器的系泊状态推力进行仿真, 所得结果与实验测试结果对比如图26所示。

图26 水下推进器推力折线图

4 结束语
为了抑制水下推进器螺旋桨空化的形成并提高其水动力性能, 文中以导管螺旋桨推进器为研究对象, 基于泵喷整流机理, 通过在水下螺旋桨推进器上加装前置定子和后置定子, 从而达到类泵喷推进器的结构。改变前置定子的相对弯度使得水流产生预旋, 改变后置定子的弦径比和距离比可以回收尾流中旋转的能量, 并分别对比分析了它们对螺旋桨水动力性能、空化抑制性能和扭矩平衡性能等方面的影响, 采用CFD的方法揭示了流场的细节变化, 对影响结果进行了定性和定量的全面分析, 得出如下结论。
1) 导管螺旋桨的空化区域主要集中在叶梢和桨毂尾端两部位, 通过加装前置定子和后置定子, 在相同工况下可以有效抑制空化的发生, 前置定子的空化抑制效果可达80%以上, 明显高于后置定子。
2) 增大后置定子的弦径比可以明显促进推进器效率; 安装距离虽然不能明显提高整体效率, 但是空化抑制率随着安装距离的增大将减小。
3) 采用非对称型前置定子和后置定子均能够实现对螺旋桨扭矩的平衡, 后置定子的平衡效果远远高于前置定子。
文中仅针对单个螺旋桨的空化抑制展开研究, 下一步将基于实际使用场景, 针对多个螺旋桨工作时的空化情况进行更为深入的研究。
[1] 蒋新松, 封锡盛, 王棣棠.水下机器人[M].沈阳: 辽宁科技出版社, 2000.
[2] CansinÖ M, Ahmet Y G, Yasemin A Ö, et al.Underwater Radiated Noise Prediction for a Submarine Propeller in Different Flow Conditions[J].Ocean Engineering, 2016,126(1):488-500.
[3] 聂延生, 韩学胜, 曾鸿, 等.对转螺旋桨的结构原理及特点分析[J].船电技术, 2005, 25(2): 50-52.
Nie Yan-sheng, Han Yue-sheng, Zeng Hong, et al.Analysis about the Construction Principle and Characteristics of Contra Rotating Propeller[J].Marine Electric & Electronic Engineering, 2005, 25(2): 50-52.
[4] 贾彩娟, 张宇文.水下航行器局部空泡流场的非线性分析[J].鱼雷技术, 2002, 10(3): 21-31.
Jia Cai-juan, Zhang Yu-wen.Nonlinear Analysis of the Partial Cavity Flow Field around Undersea Vehicle[J].Journal of Unmanned Undersea Systems, 2002, 10(3): 21-31.
[5] 宋保维, 马骥, 胡海豹, 等.水下航行器流噪声特性分析[J].鱼雷技术, 2009, 17(2): 5-9.
Song Bao-wei, Ma Ji, Hu Hai-bao, et al.Numerical Analysis of Flow Noise for Underwater Vehicle[J].Journal of Unmanned Undersea Systems, 2009, 17(2): 5-9.
[6] 陆芳, 陆林章, 庞业珍, 等.螺旋桨空泡与脉动压力及振动特性研究[J].船舶力学, 2019, 23(11): 1294-1299.
Lu Fang, Lu Lin-zhang, Pang Ye-zhen, et al.Investigation on Tip Vortex Cavitation and PressureFluctuation of Pro- peller[J].Journal of Ship Mechanics, 2019, 23(11): 1294- 1299.
[7] 温亮军, 唐登海, 辛公正, 等.螺旋桨设计参数对桨叶片空泡性能的影响分析[J].船舶力学, 2016, 20(11): 1361-1368.
Wen Liang-jun, Tang Deng-hai, Xin Gong-zheng, et al.Numerical Study on the Effect of the Propeller Design Parameterson Its Sheet Cavitation Performance[J].Journal of Ship Mechanics, 2016, 20(11): 1361-1368.
[8] 齐江辉, 郭健, 郑亚雄, 等.七叶侧斜螺旋桨设计参数对空泡性能的影响研究[J].推进技术, 2019, 40(10): 2367-2372.
Qi Jiang-hui, Guo Jian, Zheng Ya-xiong, et al.Numerical Simulation of a Seven-Blade Propeller with Skew onIts Cavitation Characteristics and Tip Vortex Evolution[J].Journal of Propulsion Technology, 2019, 40(10): 2367- 2372.
[9] 李生, 赵威, 刘敏.前置定子导管桨空化特性数值分析[J].舰船科学技术, 2019, 41(12): 20-24.
Li Sheng, Zhao Wei, Liu Min.Numerical Simulation of Cavitation Characteristics of Ducted Propeller with Pre-swirl Stators[J].Ship Science and Technology, 2019, 41(12): 20-24.
[10] 彭云龙, 王永生, 刘承江, 等.前置与后置定子泵喷推进器的水动力[J].哈尔滨工程大学学报, 2019, 40(1): 132-140.
Peng Yun-long, Wang Yong-sheng, Liu Cheng-jiang, et al.Comparative Analysis of the Hydrodynamic Performance ofFront-stator and Rear-stator Pump-jets[J].Journal of Harbin Engineering University, 2019, 40(1): 132-140.
[11] Park C, Kim G D, Yim G T, et al.A Validation Study of the Model Test Method for Propeller Cavitation Noise Prediction[J].Ocean Engineering, 2020, 213: 1-10.
[12] 刘启军, 邱家兴, 程玉胜.船舶螺旋桨空化噪声非均匀调制特性及其应用[J].舰船科学技术,2017, 39(6):18- 22.
Liu Qi-jun, Qiu Jia-xing, Cheng Yu-sheng.Non-uniform Modulation Feature of Ship Propeller Cavitation Noise and its Application[J].Ship Science and Technology, 2017, 39(6): 18-22.
[13] Launder B E, Spalding D B.Lectures in Mathematical Models of Turbulence[M].London:Academic Press,1972.
[14] Yilmaz N, Dong X Q, Aktas B, et al.Experimental and Numerical Investigations of Tip Vortex Cavitation for the Propeller of a Research Vessel[J].Ocean Engineering, 2020, 215: 1-16.
[15] Sebastian K, Judyta F.Numerical and Experimental Propeller Noise Investigations[J].Ocean Engineering, 2016, 120(1):108-115.
[16] 张成, 张大海, 魏强.螺旋桨非空泡噪声数值计算方法研究[J].舰船科学技术,2016, 38(5): 21-25.
Zhang Cheng, Zhang Da-hai, Wei Qiang.Numeric Simulation of Non-cavatation Propeller Noise[J].Ship Science and Technology, 2016, 38(5): 21-25.
[17] 邱家兴, 程玉胜, 张惊丞.船舶噪声DEMON谱质量评估方法[J].舰船科学技术.2014, 36(9): 46-49.
Qiu Jia-xing, Cheng Yu-sheng, Zhang Jing-cheng.Study of Ship-radiated Noise DEMON Quality Assessment Methods[J].Ship Science and Technology, 2014, 36(9): 46-49.
[18] 韩宝玉, 姜鹏, 刘剑超, 等.螺旋桨非定常片空泡CFD数值方法研究[J].船舶工程, 2015, 37(1): 76-78, 166.
Han Bao-yu, Jiang Peng, Liu Jian-chao, et al.Numerical Study of Propeller Unsteady Sheet CavitationUsing CFD Method[J].Ship Science and Technology, 2015, 37(1): 76-78, 166.
Research on Propeller Cavitation Suppression Based on Pump Jet Rectification Mechanism
ZHAOXiao-yu1,2, WUTian-long1,2, LINXing-hua1, WUJian-guo1, ZHANGMin-ge2
(1.School of Mechanical Engineering, Hebei University of Technology, Tianjin 300130, China; 2.Tianjin Hanhai Lanfan Marine Technology Co.,Ltd., Tianjin 300130, China)
To prevent cavitation of underwater propellers and improve hydrodynamic performance, based on pump jet rectification mechanism, front and rear stators were installed for conduit propellers.The effects of front and rear stators on cavitation suppression, torque balance, and propulsion efficiency of conduit propellers were studied by computational fluid dynamics simulation analyses and experiments.The results showed that the front stator has an effect on cavitation suppression, and the relative bending has a significant effect on improving the propulsion efficiency, which can balance part of the roll torque.The rear stator has an effect on restraining cavitation in the wake area of the propellers.The section-chord diameter ratio and installation position has the greatest effect on improving the efficiency and torque balance of the propellers.Therefore, the noise level of the propeller can be reduced, cavitation performance can be optimized, and hydrodynamic performance can be improved by installing proper stators before and after the conduit propeller, which provides an important reference for future structural designs of the pump jet propellers.
underwater propeller; cavitation suppression; computational fluid dynamics; pump jet; rectification mechanism
赵晓宇, 武天龙, 林兴华, 等.基于泵喷整流机理的螺旋桨空化抑制研究[J].水下无人系统学报, 2022, 30(1): 68-77.
TJ630.1; TB71.2
A
2096-3920(2022)01-0068-10
10.11993/j.issn.2096-3920.2020.04.009
2021-01-09;
2021-04-20.
河北省自然科学基金项目资助(E2018202259).
赵晓宇(1993-), 男, 在读硕士, 主要研究方向为水下机器人动力系统.
(责任编辑: 杨力军)
