弱电网条件下提升LCL型逆变器稳定性的控制策略
2022-03-15唐莎莎杨佳霖
郑 勇,唐莎莎,张 丽,杨佳霖
(重庆涪陵电力实业股份有限公司,重庆 408000)
近年来,为了应对日益严重的能源危机和环境问题,基于可再生能源的分布式系统得到了广泛应用[1]。由于位于电网末梢或是较偏远地区的分布式发电系统在并入电网之前通常需要多级变压器和较长的传输线,因此电网表现出高阻抗特性,这通常被称为弱电网[2-4]。根据IEEE 1204标准,弱电网的电气特性主要有两个方面:①低短路比、高电网阻抗;②交流机械惯量低、交流功率注入期间调频差。电网阻抗的变化可能会导致并网逆变器的不稳定现象[5-7]。
并网逆变器在分布式发电系统并网过程中作用重大,然而逆变器直接的输出电流中含有丰富的谐波,需要采用滤波器来滤除谐波,保证电能质量。同L滤波器及LC滤波器相比,LCL滤波器的滤波效果更优且体积较小,从而得到了广泛应用。然而,LCL滤波器是一个3阶系统,存在固有的谐振尖峰[8]。为抑制LCL型逆变器的谐振现象,常采用无源阻尼及有源阻尼技术。无源阻尼法是在滤波器的电感或电容器件上串联或并联电阻,从而增大系统的阻尼[9]。有源阻尼法大致分为两类[10-11]:一类是通过在控制中引入滤波器上的电压或电流参量的反馈,通过控制算法阻尼系统的谐振峰,其效果可等效于无源阻尼法,但是能避免无源阻尼法会带来较大能量损耗的弊端;另一类有源阻尼法是通过在前向通道增加数字滤波器。
上述的阻尼方法在设计时大多忽略了电网阻抗的影响,然而在弱电网条件下,电网阻抗已不可忽略,因此若仅采用上述阻尼方法,则逆变器有可能失稳。为揭示并网阻抗和逆变器稳定性之间的关系,文献[12]针对并网阻抗对大型光伏电站稳定性的影响进行研究,但并未同时提出相应解决策略;文献[13]提出了弱电网下的基于逆变器相关状态变量反馈的极点配置策略,该策略在削弱固定的并网阻抗对系统稳定性的影响时效果优良,然而弱电网条件下并网阻抗在宽范围内变化,该策略适用性受限;文献[14]提出了一种网侧串联虚拟阻抗的方法,通过在控制环路引入增益从而达到虚拟增大网侧等效滤波电感的值,该方法消弱了并网阻抗对系统稳定性的影响程度,然而增大虚拟阻抗后会使得滤波电感上的电压压降增大;文献[15]从增加硬件电路的角度出发,通过在公共并网点PCC(point of common coupling)并联RC支路来调节电网阻抗,使并网阻抗与输出阻抗相匹配;也有文献提出对电网阻抗进行实时测量,反馈到控制系统中进行自适应控制,然而这需要高精度的阻抗测量技术,会增加控制算法复杂度,并且有可能导致并网电流质量变差[16-18]。
综上所述,弱电网情况下,并网阻抗与逆变器输出阻抗的不匹配导致了逆变器的失稳情况,因此本文的目的在于提出一种新型控制策略,改变逆变器的等效输出阻抗及相角特性。首先,建立了逆变器的等效诺顿模型,利用阻抗分析法分析了逆变器在弱电网条件下失稳的原因,即系统相角裕度的减小;接着,为提高逆变器输出阻抗和电网阻抗在相交频段的相角裕度,提出一种基于有限集模型预测控制和逆模型前馈的控制策略,通过在控制层引入这两种控制方法实现系统控制环路的降阶,使得系统在较宽频段内保持较大的相角裕度,从而提高系统的稳定性;最后,在Matlab/Simulink系统中搭建仿真模型,通过对比不同控制策略的控制效果,验证了本文所提控制策略的有效性。
1 基于阻抗分析法的逆变器稳定性分析
基于小信号的阻抗分析方法从阻抗角度出发对系统建模,在弱电网条件下,电网阻抗在较宽范围内变化时会导致逆变器并网系统失去稳定性,阻抗分析法可较为直观地分析弱电网下的逆变器稳定性问题。
首先对LCL型逆变器进行建模。传统的双环控制逆变器可被等效为诺顿等效模型[19],如图1所示。
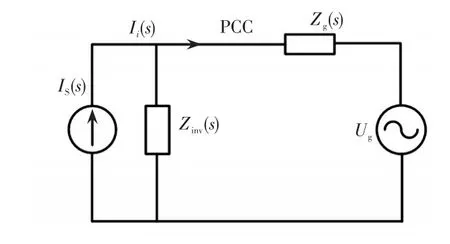
图1 LCL逆变器诺顿等效电路Fig.1 Norton equivalent circuit of LCL-type inverter
图1中,Is(s)代表逆变器诺顿等效电路的等效电流源,Zinv(s)代表逆变器的等效输出阻抗,Ii(s)代表逆变器输出电流,Zg(s)代表电网等效阻抗。

综上,在弱电网条件下,逆变器并网系统稳定运行需要满足以下条件[20]:①当Zg(s)=0时,即传统强电网条件下,并网逆变器是稳定的;②电网侧是稳定的;③当电网阻抗不可忽略时,需Zg(s)/Zinv(s)满足奈奎斯特稳定判据。
对于条件①,在合理设置逆变器的各项参数和控制参数即可实现;对于条件②,因大电网不存在右半平面零极点,电网侧的稳定容易得到保证;对于条件③,可以运用相角裕度来进行稳定性判断。已有文献指出,感性阻抗更容易导致并网逆变器的失稳,因此认为电网阻抗为纯感性即Zg(s)=sLg,其中Lg为电网等效电感。基于相角裕度的判据如下:①如果逆变器等效输出阻抗和电网阻抗的幅频曲线在全频段上均不交截,则系统稳定;②若两者存在交截点,则交截点的相角裕度PM需满足PM>0,系统才能保证稳定,交截点处的频率称为谐振频率,记为 fr。其中PM的定义为

考虑电网阻抗为纯感性,则Zg(s)的相角恒为90°,则上述判断条件可简化为:在Zg(s)和Zinv(s)相交频段内,当Zinv(s)的相位出现低于-90°的区域,可能导致系统失稳。同时,按照自动控制理论的相关知识,在实际设计中,为了保证系统的动态性能和阻尼特性,获得满意的控制性能,还需要保证系统留有一定的相角裕度[15,21]。
PI控制逆变器输出阻抗和电网阻抗的频率特性如图2所示,在采用传统PI控制器进行双环控制时,当电网阻抗发生变化时,会出现逆变器失稳的情况,随着电网阻抗的增大,Zg(s)和Zinv(s)的交截点前移,相角裕度减小,这将影响系统的稳定性。
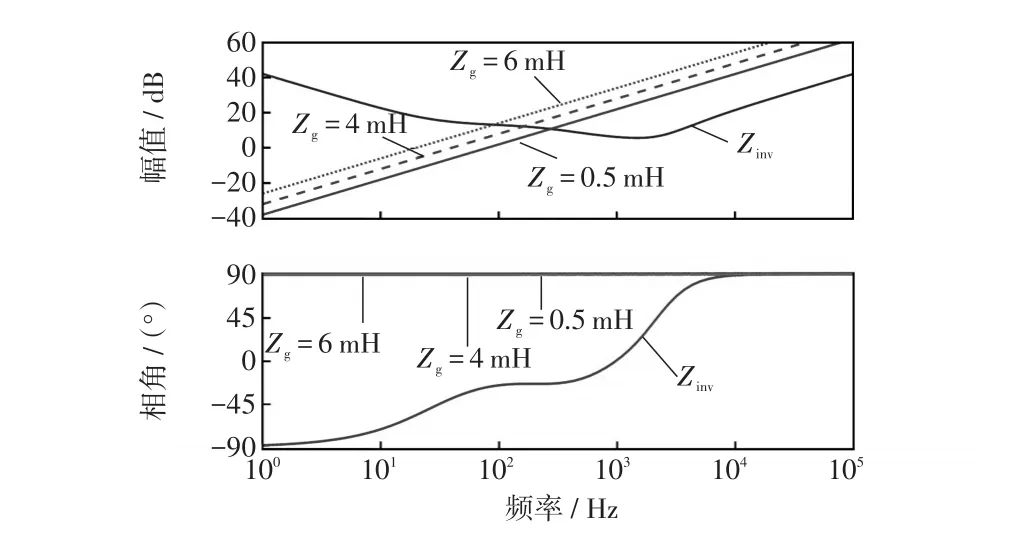
图2 PI控制逆变器输出阻抗和电网阻抗的频率特性Fig.2 Frequency characteristics of inverter output impedance and grid impedance with PI controller
准PR控制的相角特性优于PI控制器[22],然而即使采用准PR控制器,依然无法在较宽频段内使系统保持较大的相角裕度,PR控制逆变器输出阻抗和电网阻抗的频率特性如图3所示。这说明若仅使用2种控制器对逆变器进行常规双环控制,则在弱电网情况下,逆变器系统可能会失去稳定。
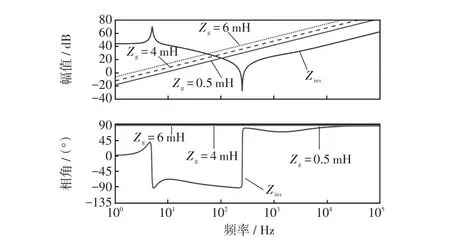
图3 PR控制逆变器输出阻抗和电网阻抗的频率特性Fig.3 Frequency characteristics of inverter output impedance and grid impedance with PR controller
由上述分析可知,在弱电网情况下要提高并网逆变器的稳定性,存在2种设计思路:①为使得逆变器阻抗和电网阻抗不存在交截,可以通过采用相应控制策略增大逆变器输出阻抗的幅值,使得Zg(s)和Zinv(s)不存在交点;②提升逆变器阻抗和电网阻抗相交频段里输出阻抗Zinv(s)的相位。
2 新型混合控制策略
为解决弱电网情形下,逆变器采用传统控制时可能失稳的问题,本文提出一种新型控制策略,通过在控制层中引入有限集模型预测控制和逆模型前馈控制,实现系统部分传递函数的单位化,从而实现逆变器控制环路的降阶。模型降阶从而改变逆变器的输出阻抗特性,提高系统的相位裕度,最终达到提高并网逆变器的稳定性的目的。
2.1 考虑延时补偿的有限集模型预测控制
图4给出了逆变器内环控制框架。改进后的有限集模型预测控制框架如图5所示。
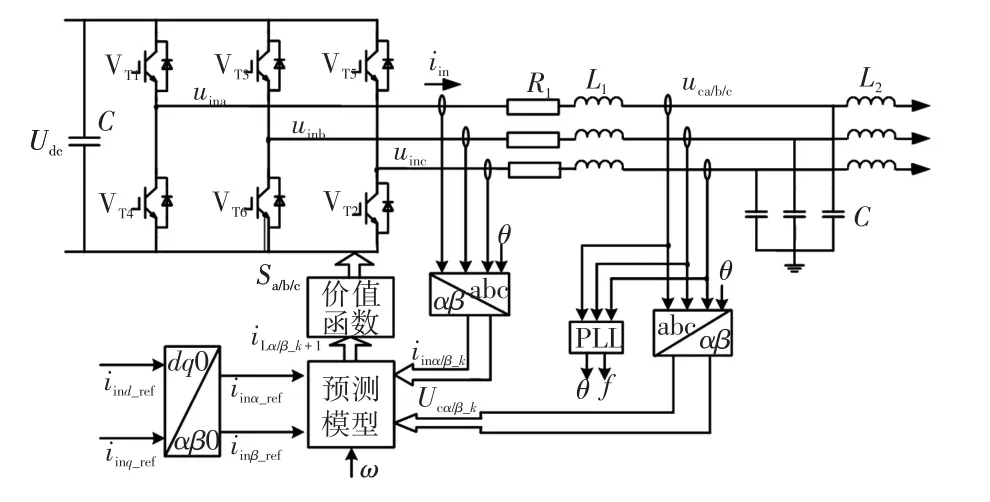
图4 逆变器控制层的内环控制框架Fig.4 Inner-loop control framework in inverter control layer
根据图5,利用abc/αβ坐标转换,可以得到并网逆变器交流侧的两相解耦电路表达式为
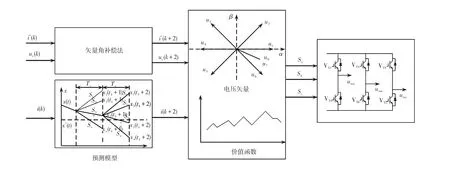
图5 改进后的有限集模型预测控制框架Fig.5 Framework of improved FCS-MPC

式中:R1为LCL滤波器的逆变器侧电阻;iinα、iinβ为逆变器输出电流在αβ坐标系下的分量;uinα、uinβ为逆变器输出电压在αβ坐标系下的分量;ucα、ucβ为滤波电容电压在αβ坐标系下的分量。对式(4)在(tk,tk+1)进行离散化,整理得
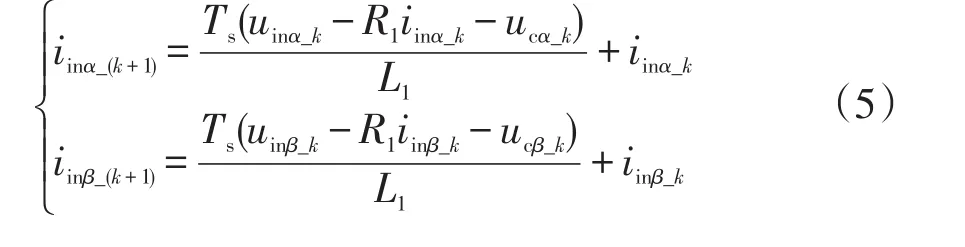
式(5)中:Ts为系统采样频率;iinα_k、iinβ_k为逆变器在k时刻的输出电流在αβ坐标系下的分量;uinα_k、uinβ_k为逆变器在k时刻的输出电压在αβ坐标系下的分量;ucα_k、ucβ_k为k时刻滤波电容电压在αβ坐标系下的分量。式(5)即为预测模型。
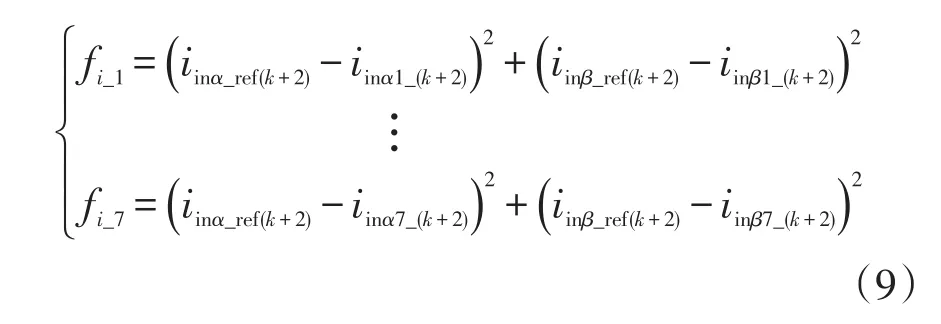
表1给出了逆变器开关状态及其输出电压之间的对应关系,不同的开关状态对应不同的uinα和uinβ。将k时刻的8组不同开关状态所对应的电压代入式(5),则可得到在k+1时刻输出电流的8组不同的iinα_k+1和iinβ_k+1,其中第1组与第8组开关状态输出相同,因此归为一种开关状态讨论。若将逆变器的输出电流作为控制对象,那么对应的价值函数可以表达为
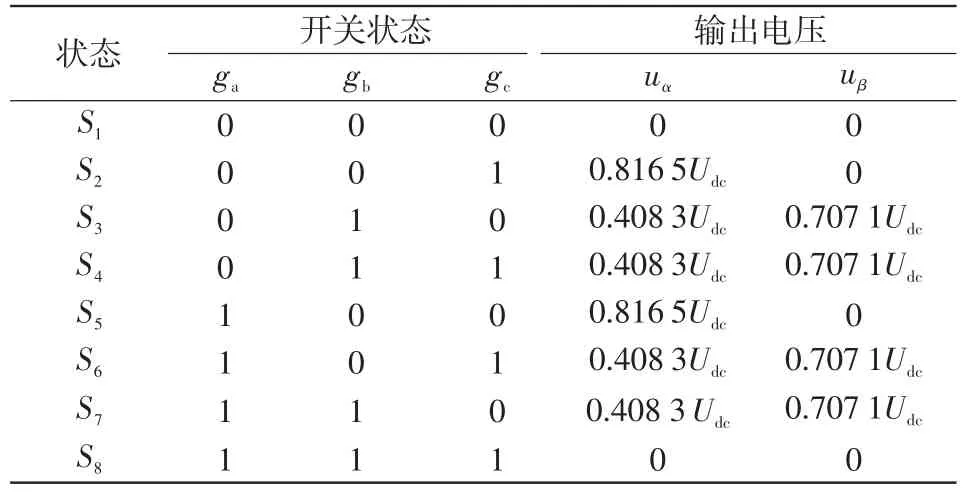
表1 开关状态与输出电压分量之间的关系Tab.1 Relationship between switching states and output voltage components

式中:iinα_ref和iinβ_ref为在αβ坐标系下的参考电流;iinα1_(k+1)、iinβ1_(k+1)为逆变器在第 1 组开关状态下在k+1时刻的输出电流预测值在αβ坐标系下的分量;iinα7_(k+1)、iinβ7_(k+1)为逆变器在第 7 种开关状态下在k+1时刻的输出电流预测值在αβ坐标系下的分量。
最小价值函数为

式中,fn(n=1,2,…,7)为7种开关状态所对应价值函数。将得到的8组价值函数值代入式(7),满足最小价值函数的一组开关状态ga、gb、gc将在下一时刻被应用于逆变器。在多个输出量中,只有满足最小价值函数式(7)的输出yi(k+1),才能被应用于控制系统。
传统的有限集模型预测控制算法大多忽略了采样和计算过程所消耗的时间,但实际过程中这段时间不能忽略,为进行延时补偿需要对算法进行改进。
利用有限集模型预测控制算法多步预测的优势[23],为达到延时补偿的目的,对算法做如下改进:
(1)在k时刻利用式(4)对k+1时刻的电流进行估算,得到k+1时刻的预测电流。
(2)再利用k+1时刻的估算结果对k+2时刻的结果进行再次预测,得到k+2时刻的电流,即
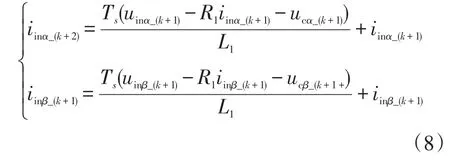
(3)将k+2时刻的预测电流代入价值函数,寻找使得价值函数最小的一组开关状态,并将最优开关状态在k+1时刻运用于逆变器。同时需要对价值函数改写为
式中,iinα_ref(k+2)、iinβ_ref(k+2)为k+2时刻参考电流的 αβ坐标分量。由式(9)可知,在改进算法后价值函数中需要k+2时刻的参考值,由于电流是随着正弦变化的,若按照传统模型预测控制中的近似方法,即近似认为k时刻的参考电流等于k+2时刻的参考电流,则会带来较大的误差,因此需要对参考电流值进行预测。由于电流的正弦变化特性,因此可以考虑采用相角补偿法来对电流参考值进行预测,表示为

式中,iref(k)为k时刻的参考电流。由此,改进后的有限集模型预测控制结构框图如图5所示。
2.2 逆模型前馈控制算法
图6给出了基于逆模型前馈的结构框图[24],图中R(s)、Y(s)、C(s)、P(s)、D(s)分别是输入信号、输出信号、反馈控制器、被控对象及扰动信号,GFF(s)为前馈控制器,E(s)为输入信号与输出信号间的误差。

图6 逆模型前馈控制系统Fig.6 Inverse model feedforward control system
根据图6,若GFF(s)=[P (s)]-1成立,可以得到输入信号和输出信号以及输入信号和扰动信号的传递函数为
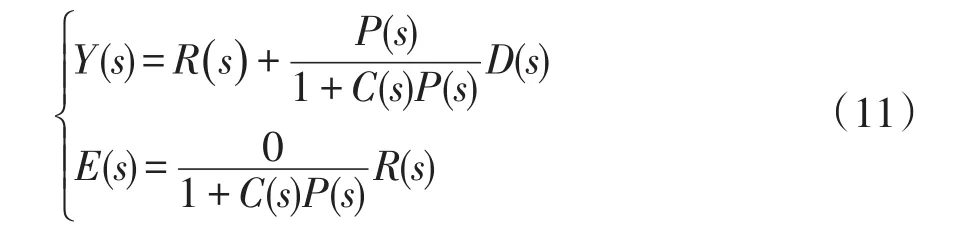
这样可实现R(s)与Y(s)之间传递函数的单位化,而对于扰动信号D(s),则可以通过C(s)调节实现扰动信号的最优控制。
由于在电流内环采用有限集模型预测控制,则由于算法优良的跟踪性能,电流内环中的参考电流和逆变器输出电流iin可以视作相等,即也即电流内环传递函数可视为1。而在电压外环的控制中,为实现传递函数的单位化,即电容电压和电容电压的参考值相等(uc_ref=uc),由于滤波电容C是控制对象,根据逆模型前馈控制的原则,可以在控制中构建C的逆模型,因此设计出新型控制方式总体结构框图,如图7所示。图中,ku_p和ku_I分别为电压外环PI控制器的比例增益和积分增益;L1和R1分别为LCL滤波器的逆变器侧电感和电阻;C和Rc分别为滤波电容和电阻;Cd和Cq为C在dq轴上的解耦项;upd、upq和igd_ref、igq_ref分别为并网电压和参考电流在dq坐标系下的分量;Rg和Lg分别为LCL型逆变器网侧的电感和电阻;ki_P和ki_I分别为PI控制器的比例增益和积分增益。根据图7(a)电压外环的控制结构,反馈和输出的信号可以表示为
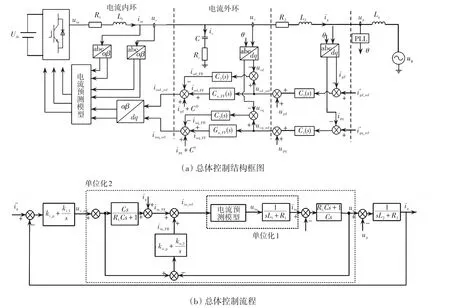
图7 新型控制方式总体结构框图及总体控制流程Fig.7 Overall structural block diagram and control flowchat of novel control method

根据图7和式(11),逆变器控制的电压外环也实现了传递函数的单位化。
2.3 应用层设计
考虑到分布式电源通常作为电流源工作。因此在对逆变器的应用层进行控制算法设计时,选择并网电流为控制对象。如图7(a)所示,控制层中电压外环的参考电压uc_ref为

2.4 所提算法在弱电网条件下的稳定性分析
图7(b)为所提控制策略的流程。由图7(b)可知,由于在逆变器的控制层引入了有限集电流模型预测控制和逆模型前馈控制,电流内环的传递函数与电压外环的传递函数实现了单位化,因此可将逆变器系统的流程图进行简化,简化结果如图8所示。由图8可知,此时的逆变器系统显示出的外特性被简化,系统实现了降阶。
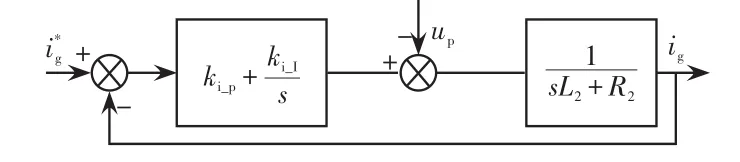
图8 简化后的控制框图Fig.8 Simplified control block diagram
根据图8,可得在采用所提新型控制方式后逆变器诺顿等效模型的等效输出阻抗为

利用第1节所提的判据,绘制在新型控制方式下的逆变器Zg(s)/Zinv(s)波特图,结果如图9所示。在采用新型控制方式后,在Zg(s)和Zinv(s)相交频段内,Zinv(s)的相位未出现低于-90°的区域,说明系统是稳定的,且在相当大范围内,系统能够保持较大的相角裕度。
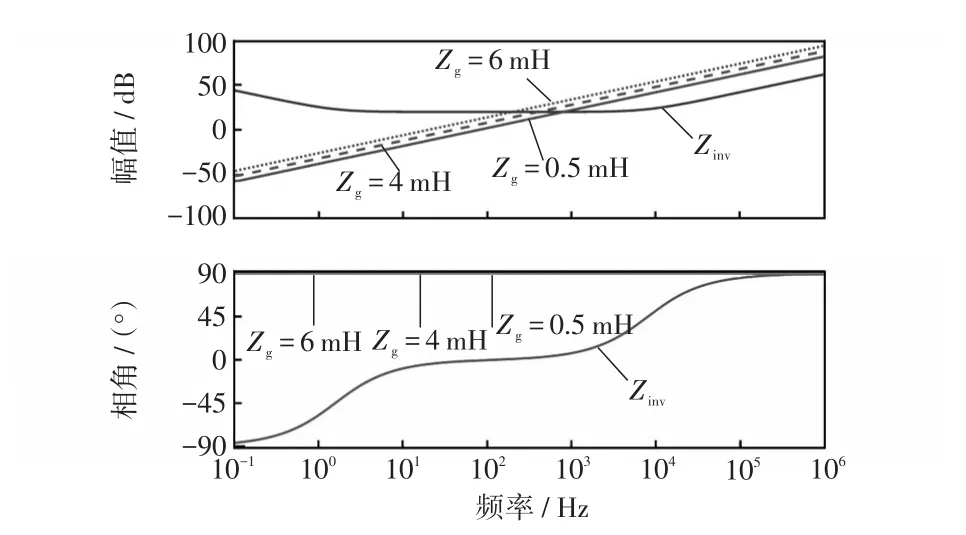
图9 新型控制逆变器输出阻抗和电网阻抗的频率特性Fig.9 Frequency characteristics of inverter output impedance and grid impedance under novel control
同时为保证逆变器输出电能质量的稳定,对于逆变器来说,还需要考虑其对电网背景谐波的衰减能力。若要保证逆变器能够对电网背景谐波有较好的衰减效果,由式(1)可知,需保证电网阻抗和逆变器等效阻抗之和在中高频段有较大值,为此对比了常规控制方式和本文所提控制方式下的波特图,如10所示。相比之下,本文所提控制策略中电网阻抗和逆变器等效阻抗之和在中频段大于传统控制策略,说明本文所提控制策略能够更有效地抑制来自电网的背景谐波。
3 仿真分析
为验证上述理论分析的正确性,在Matlab/Simulink中搭建了LCL型三相并网逆变器仿真模型。除弱电网条件下,并网阻抗不可忽略外,系统运行方式的改变,也会引起并网阻抗的改变。因此在仿真中对比3种控制方式在参考电流发生阶跃以及电网阻抗变化时的并网电流,同时还对比了针对电网背景谐波的衰减能力。3种控制方式分别为:①常规的双环控制,其中内环控制器采用准PR控制;②在常规双环控制基础上改进的虚拟电阻控制[25],增加的虚拟电阻为2 Ω;③本文所提控制。表2给出了系统的仿真参数,其中:Kc为常规双环控制中电容电流反馈系数,KP、KR和ωc分别为准比例PR控制器的比例参数、谐振参数和截止频率。
3.1 强电网条件下仿真结果
在强电网时,电网阻抗较小,因此在仿真中设定Lg=0.5 mH。
图11给出了3种控制方式下并网电流的波形及其FFT结果,其中图11(a)和(b)是常规控制方式下并网电流的仿真结果,图11(c)和(d)为虚拟电阻控制下并网电流的仿真结果,图11(e)和(f)是本文所提控制策略下并网电流的仿真结果。对比发现,强电网条件下,3种控制方式的逆变器输出电流波形平稳,THD值均很小。这说明强电网情况下,3种控制方式都能保证逆变器的稳定运行。
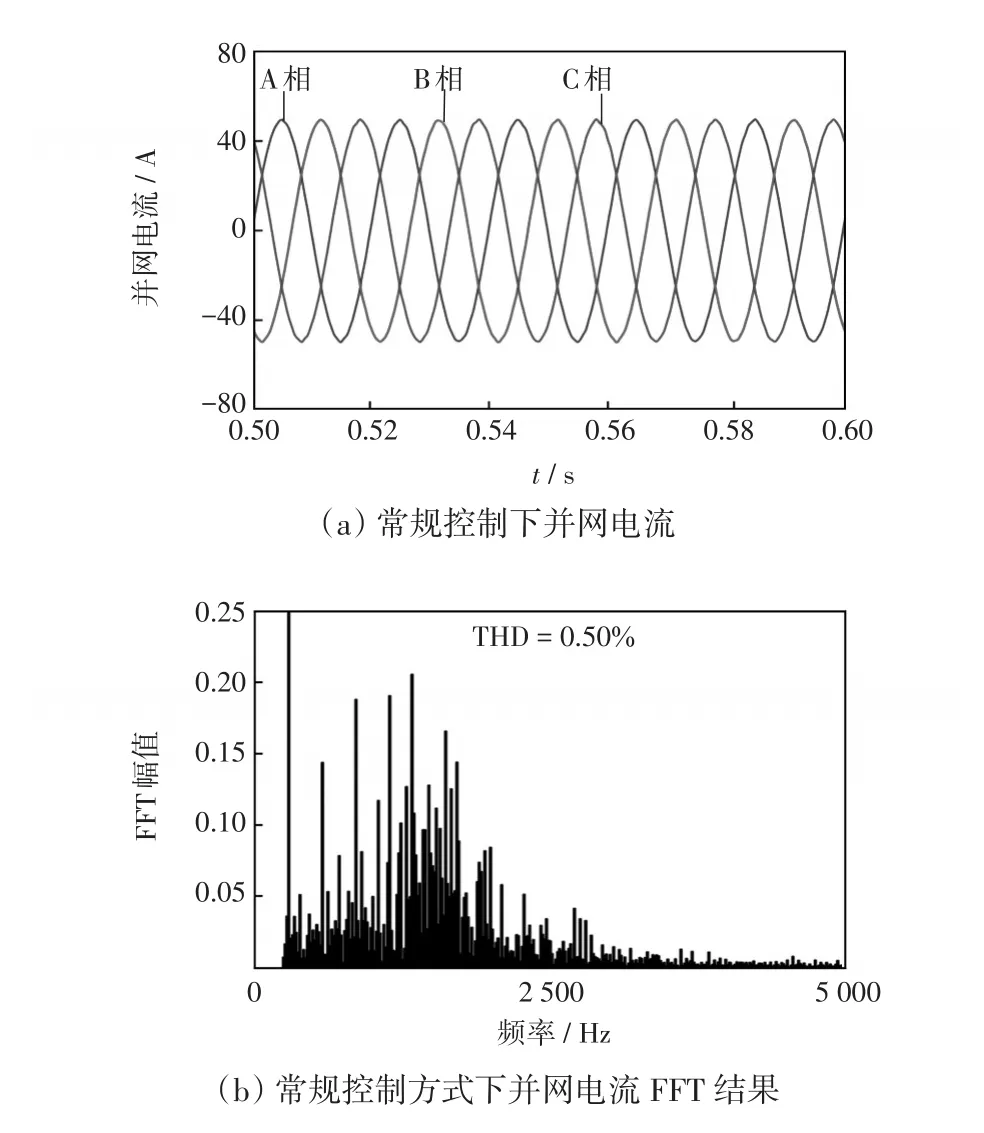
图11 强电网条件下仿真结果Fig.11 Simulation results under strong grid conditions
为了对比在参考电流阶跃时3种控制方式的控制效果,设定系统在0.8 s时参考电流由50 A阶跃至70 A,图11(g)给出了3种控制方式下并网电流的d轴分量。由图11(g)可知,在参考电流发生阶跃时,常规控制方式有很明显的超调振荡过程,调节时间较长。而虚拟电阻控制和本文所提控制下的逆变器并网电流均能快速响应,平滑完成过渡。此外,对比发现在3种控制中,本文所提控制策略下的并网电流其纹波更小。
综上,本文所提控制策略在强电网条件下控制效果更优。
3.2 弱电网条件下仿真结果
弱电网情况下,电网阻抗不可忽略,因此在仿真中设定Lg=15 mH。图12给出了仿真结果。
图12(a)和(b)为常规控制方式下并网电流的仿真结果,由图可知,在弱电网条件下,采用常规控制的并网电流波形发生了严重畸变,这说明逆变器出现了失稳情况。图12(c)和(d)是阻尼电阻控制下的仿真结果,由于附加了虚拟电阻,提升了逆变器的等效输出阻抗,因此该策略在弱电网条件下的稳定性较常规控制策略更好,波形畸变程度比常规控制更小,但是依旧维持输出稳定的电流。然而,在同样的条件下,本文所提控制策略下的逆变器依旧可以很好地保证并网电流的质量,电流的THD值依旧很小。

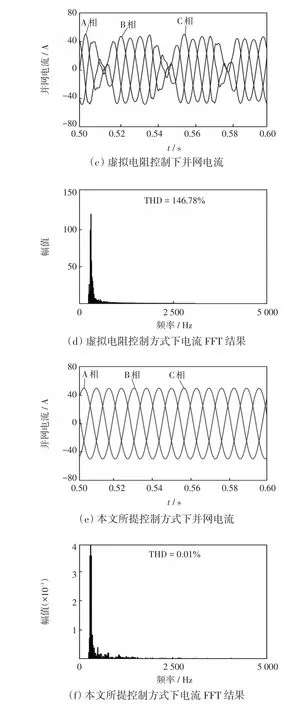
图12 弱电网条件下仿真结果Fig.12 Simulation results under weak grid conditions
这表明弱电网条件下采用并常规控制策略的逆变器系统出现了失稳,而采用了虚拟电阻控制方式的逆变器其稳定性虽得到了一定的提高,然而在同样的条件下,本文所提控制策略的逆变器系统依然能维持稳定。因此,本文所提控制策略能够在更宽阻抗范围内有效提高了LCL型逆变器的稳定性,更能够适应弱电网条件下电网阻抗多变的情况。
3.3 电网背景谐波仿真
为对比分析3种控制策略下,逆变器针对电网背景谐波的衰减能力,在仿真中向电网电压注入一系列幅值为电网电压3%,频率在650~2 500 Hz之间的谐波。图13给出了仿真结果。
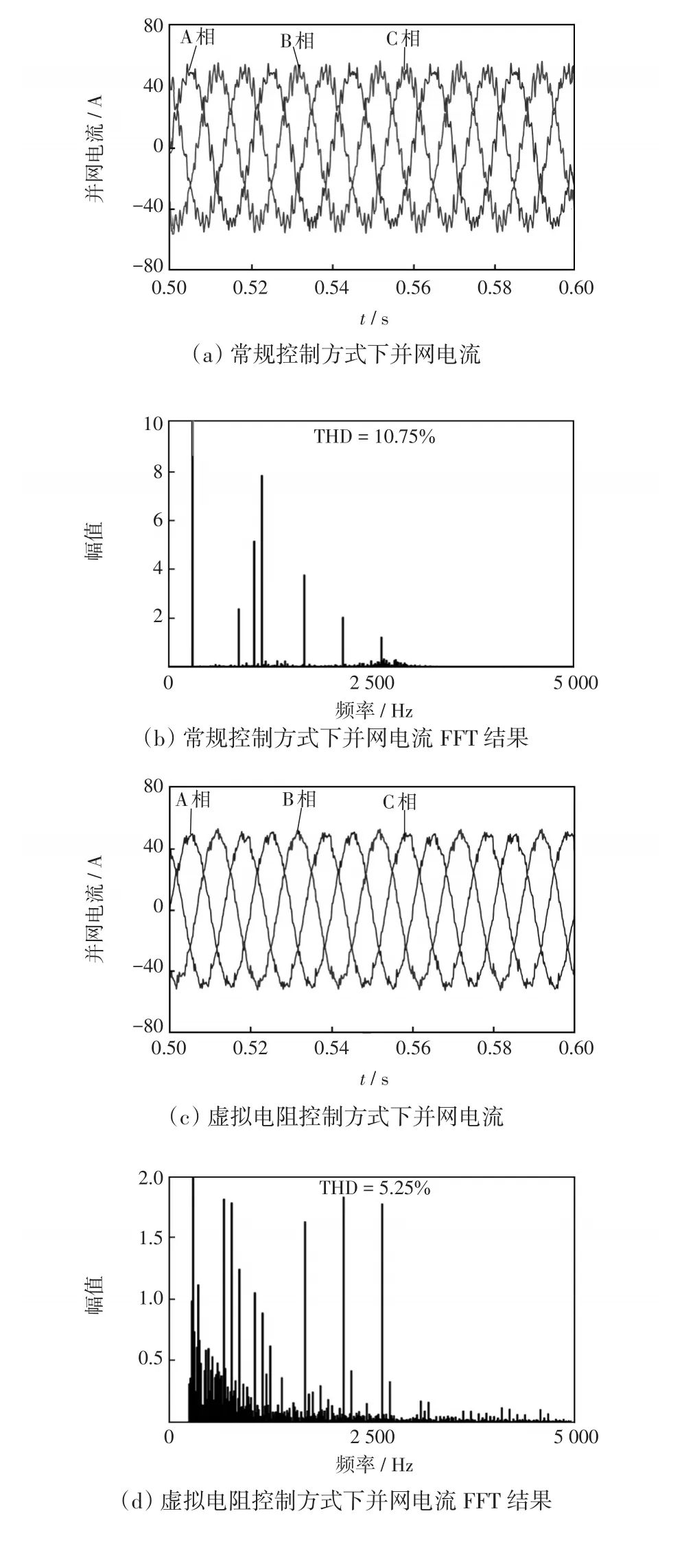

图13 含电网背景谐波条件下仿真结果Fig.13 Simulation results under the condition including grid background harmonics
由图13可知,常规控制方式下,逆变器对电网背景谐波的衰减能力不足,并网电流的THD值达到了10.75%,而弱电网情况下,电网的背景谐波会变得更加丰富。虚拟电阻控制策略和本文所提的控制策略都有效提高了逆变器的等效输出阻抗,因此电网阻抗和逆变器等效阻抗之和较大,对电网背景谐波的衰减能力更强,2种控制方式下并网电流的THD值分别为5.25%和4.52%,同时本文所提控制策略的衰减能力较好,这说明面对来自大电网丰富的谐波,本文所提控制策略能够有效的衰减,保证了并网电流的质量,能够适应条件较为恶劣的场景。
4 结论
弱电网条件下,由于逆变器并网阻抗与电网阻抗的不匹配程度增加,因此传统的控制策略不能保证逆变器的稳定工作,由此本文提出一种新型控制策略,经过理论分析和仿真对比得出以下结论:
(1)通过在控制层引入有限集模型预测控制与逆模型前馈控制,实现了控制系统的环路降阶,使得LCL型逆变器的呈现出L型逆变器的外特性;
(2)相比较于常规策略,本文所提控制策略提高了系统在较宽范围内的相角裕度,从而保证了可以允许并网阻抗在更大的范围内变化;
(3)仿真结果表明,本文所提控制策略在强电网、弱电网以及电网背景谐波衰减中均具有更好的控制效果。