多臂多自由度动物离心机控制系统设计*
2022-03-15潘俊孜周好斌徐向前
潘俊孜,周好斌,高 峰,徐向前
(西安石油大学 材料科学与工程学院,陕西 西安 710065)
0 引言
由于现代化战机的大量服役及空战环境的复杂化,在飞行过程中持续产生的高过载可引起飞行人员的短暂黑视、空间定位错觉、甚至意识丧失(G-LOC),严重影响飞行安全。因此,航空航天环境模拟技术已经成为航天医学的重中之重。在这个背景下,亟需开发研制一台多臂多自由度动物离心机,旨在通过预编程的方式模拟高G值(高加速度环境)、不同G值增长率、单相和多相G值组合的飞行环境,并通过动物的生理学实验为研究飞行人员对加速度耐力不足、由加速度引起意识丧失等问题提供参考[1-3]。本文设计基于“PC+运动控制器”控制架构的动物离心机控制系统,并通过多轴运动控制器完成载物台多自由度的协同运动,以获得X、Y、Z三轴复合加速度。
1 动物离心机基本结构及运动分析
动物离心机机械结构如图1所示,主要由主轴系统、转臂系统、支撑传动系统和多自由度载物台系统组成。其中,主轴系统包括主轴伺服电机4及回转轴承7,核心功能是实现动物离心机围绕其中心轴线的360°回转运动;转臂系统包括4只转臂8、9、10、11,这样能更好地提高实验效率,同时也可以以对角线为一组的形式,即“两两一组”进行对比实验,大大提高了实验数据的采集效率,且对于整个机械结构来讲,主轴受力更加平衡,运行更加平稳;支撑传动系统主要包括减速器5、支撑方轴6,其作用是支撑离心机的机械结构和传递输出扭矩和转速;多自由度载物台系统主要包括载物台1、自转步进电机2、步进电机电动推杆3,自转步进电机和步进电机电动推杆分别控制沿实验平台切线方向的180 (°)/s的旋转运动和沿法线方向的俯仰运动。
动物离心机运行过程中,伺服电机通过减速机带动回转轴承使整个动物离心机围绕中心主轴实现不同速度的回转运动以获得Z轴(沿离心方向)的加速度,在主轴回转的同时可通过运动控制器对转臂上8台电机的同步控制分别获得X轴(沿载物台法线方向)和Y轴(沿载物台切线方向)的加速度。
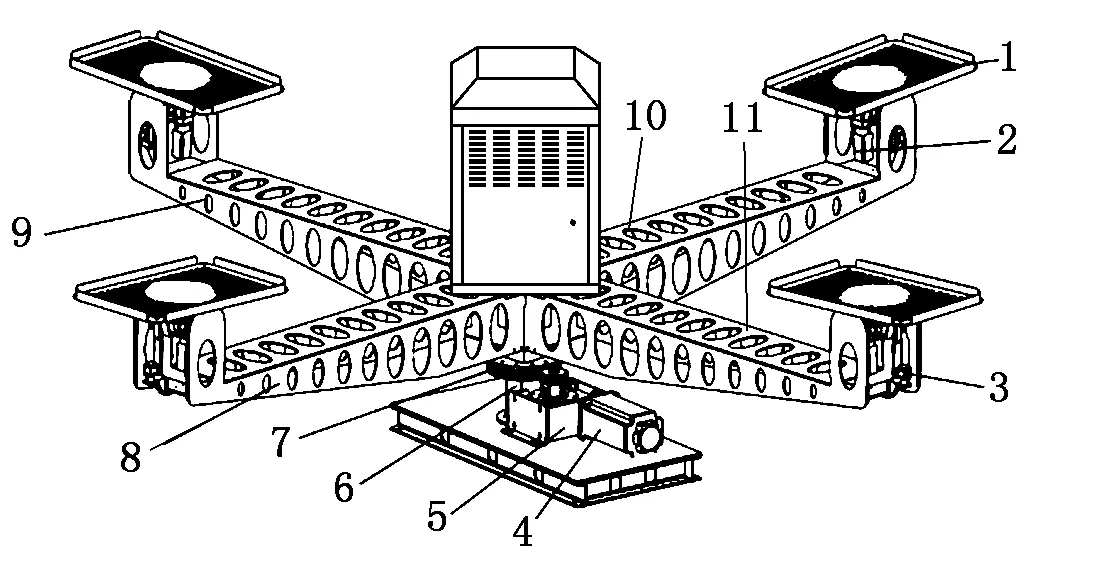
1-载物台;2-自转步进电机;3-步进电机电动推杆;4-主轴伺服电机;5-减速器;6-支撑方轴;7-回转轴承;8,9,10,11-转臂
2 总体控制方案
动物离心机主要技术指标如下:①实现主轴最大回转转速90 r/min;②离心重力加速度增长速率6 g/s(起始值为1 g);③载物台沿其切线方向180 (°)/s的旋转运动和沿法线方向的俯仰运动。
为了保证整个系统运行的可靠性和稳定性,本次设计采用主从站的控制架构。整个控制系统架构如图2所示,主要是由运动控制模块、驱动模块、执行模块和反馈模块组成的闭环控制结构。其中运动控制模块又分为主轴控制和多轴载物台控制,各自采用相对独立的驱动单元,互不干涉。
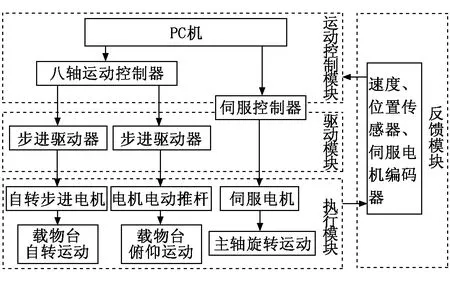
图2 控制系统架构
3 硬件系统设计
基于动物离心机的主要技术指标,对系统的硬件做出选择。
上位机选用PC机,其具有灵活、开放、便捷的软件开发环境和对数据强大的处理能力,对于使用者来讲,PC机具有成本低廉、操作简单和开放友好的人机交互的特点。
由于多转臂结构的设计,致使整个机械结构的转动惯量大大提高,对主轴电机的性能要求也变得尤为苛刻。而交流伺服电机具有抗过载能力强、对速度精确控制等特点[4],适用于有瞬间负载波动及快速启停的场合;同时编码器具有良好的抗干扰性,反馈数据的可靠性得到提高。因此,选用配有绝对值编码器的交流伺服电机及控制器,经计算确定选用的电机功率为10 kW,额定转速为2 000 r/min。
多轴运动控制器是整个载物台控制系统的核心[5],载物台在运动过程中需要进行多自由度的组合运动。为了避免控制过于集中化和便于后期维护,本次设计选用八轴运动控制器,分别控制载物台沿切线方向的180 (°)/s的旋转运动和沿法线方向的俯仰运动,选择Modbus-RTU协议通信,支持8路高速脉冲输出,各轴可独立运行,也可多轴联动。
伺服控制器、八轴运动控制器与上位机之间均通过RS485串口总线进行通讯。RS485通讯线必须用屏蔽双绞线,同时用屏蔽线将所有控制器的GND地连接起来,若通讯不稳定可在终端控制器A+、B-间并联120 Ω电阻。
电气结构示意图如图3所示,分为供电部分和逻辑控制部分。电机的逻辑控制部分由多轴运动控制器、伺服控制器组成;供电部分采用380 V接入,经过空气开关进入伺服控制器为伺服电机供电。取三相中的一相线路和零线组成220 V电压,通过24 V开关电源为载物台系统供电,且系统设有应急保护、过电流电压保护等保护措施。

图3 电气结构示意图
4 软件系统设计
VS2015集成开发环境采用分级结构,通过各层级之间的交互,使整个软件系统更易于维护、升级。本次设计基于Windows操作系统环境借助VS2015集成开发环境,使用VB.NET可视化编程语言进行基于PC机的动物离心机控制系统的软件开发,实现了逻辑运算和逻辑控制功能。系统软件包括通讯程序、系统初始化程序、各轴动作子程序等。主程序流程如图4所示。
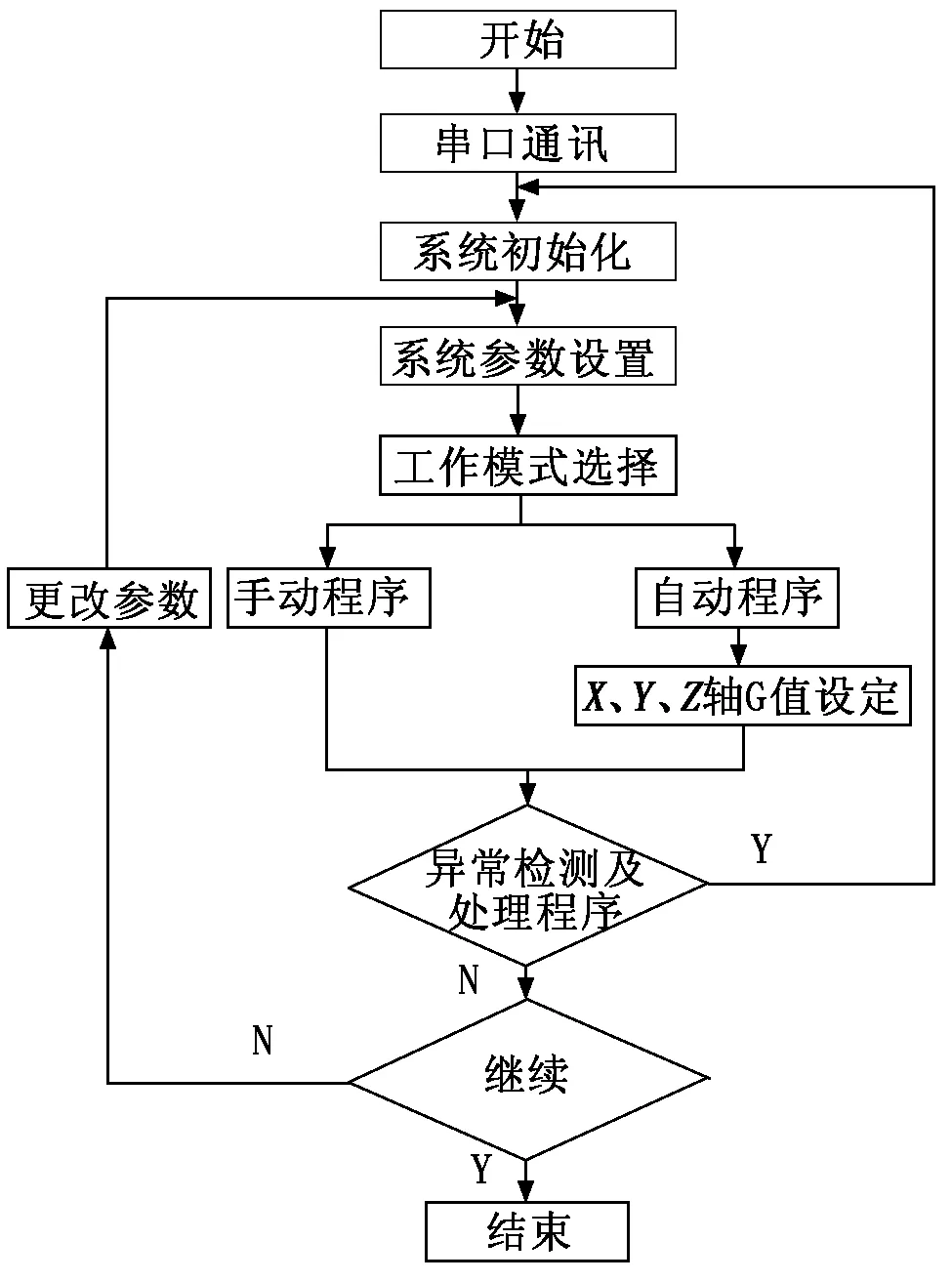
图4 主程序流程
软件系统分为界面层和程序编译层,交互界面力求简洁、直观。软件控制界面如图5所示,主要分为通讯区、功能控制区、参数设置区和实时状态监测区,包括运动参数设定、运动启停控制、运动模式设定、电机运行状态监测等功能;程序编译层包括运动控制器及伺服控制器控制指令的编译并运用多线程技术允许CPU对多个控制指令同时进行处理,很大程度上提高了对数据帧的处理效率。
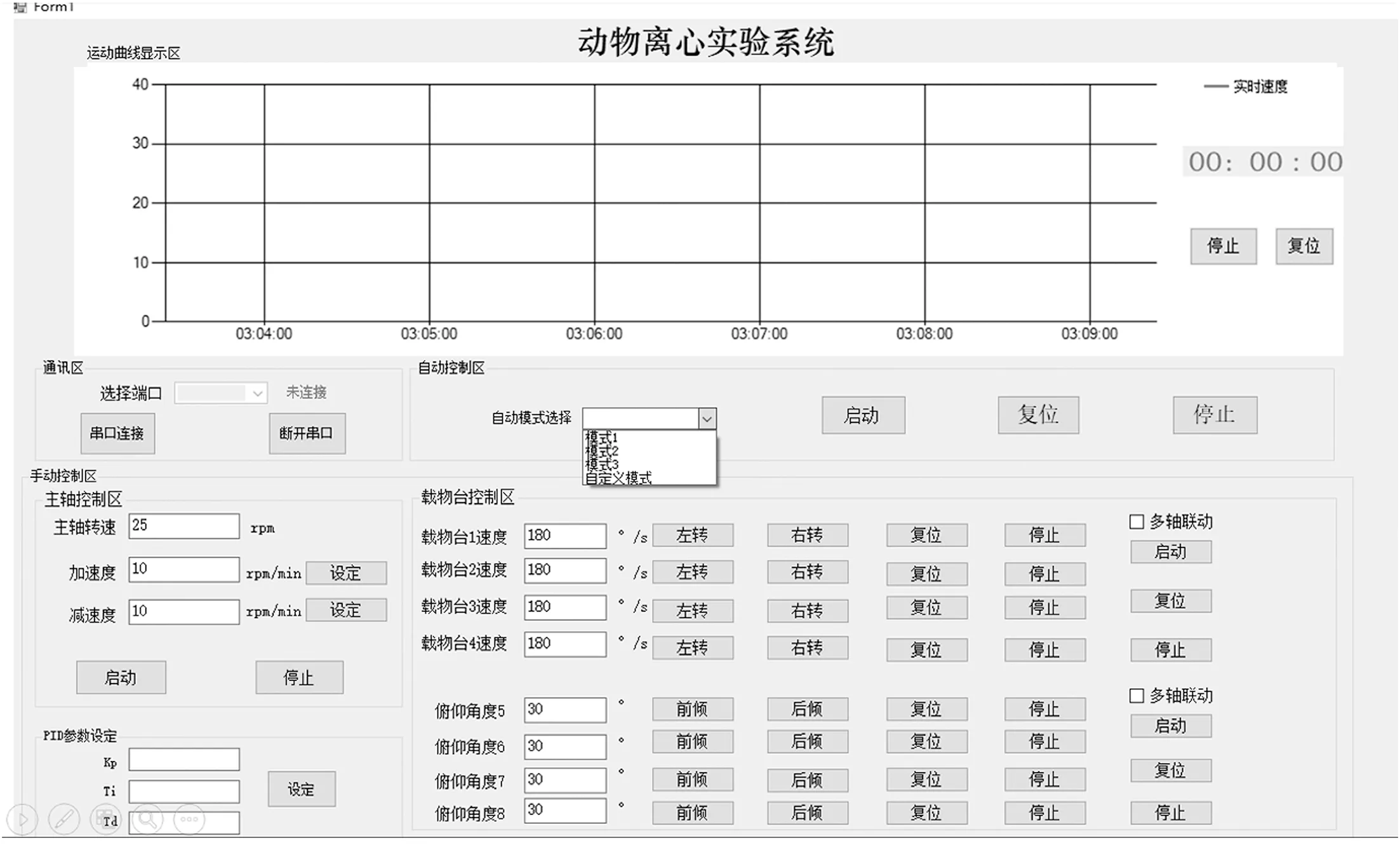
图5 软件控制界面
其中,实时状态监测区通过格式转换、平滑滤波等预处理办法,用波形图将伺服电机的实时运行状况呈现出来;通讯区通过RS485串口发送Modbus-RTU协议数据帧对运动控制器及伺服控制器设定从站号、方向/脉冲信号等参数;自动控制区在不同模式下直接设定X、Y、Z三轴G值,通过关系转换函数分别得出主轴、载物台切线方向及法线方向的转速并自动运行;手动控制区包括主轴控制区和载物台控制区,主轴控制区通过设定主轴转速及加减速度获得Z轴的加速度;载物台控制区通过对自转角度及俯仰角度的设定实现载物台的多自由度组合运动,以获得X、Y轴的复合加速度。
5 结束语
经过实验验证,本文设计的基于“PC+运动控制器”控制架构的多臂多自由度动物离心机控制系统可靠性、实时性、抗干扰性相对较好,且多自由度载物台的组合运动平稳,能够获得多样化的复合加速度组合;通讯稳定性较好,能够实现主从站之间数据的实时传输、反馈,但在多个载物台同步控制精度方面仍存在不足,还需继续优化。
