基于虚拟仪器的新型微电网运行智能控制系统设计
2022-03-15苏雨晴周银锋王子驰孙炜哲杨灵艺
苏雨晴,周银锋,王子驰,孙炜哲,杨灵艺
(平高集团有限公司,河南平顶山 467001)
随着化石能源的过度使用,微电网作为一种可以实现光伏等清洁能源就地消纳的技术,越来越受到关注[1-3]。微电网是在用户侧将各种分布式微电源以及负荷耦合形成一个小型的电网[4-5],并利用储能装置实现能量的跨时段转移,维持系统频率、电压的稳定。
微电网的能量管理和智能控制对于维持微电网的稳定运行至关重要[6-8]。传统微电网的监测和控制依赖于安装大量的硬件设备,投资成本高、运行维护困难,大幅度限制了微电网的应用发展。随着计算机技术的发展,利用软件技术实现硬件的功能成为可能,并逐步被推广[9-10]。
因此,该文开展了软件技术在微电网智能监测和控制的应用研究,提出了基于虚拟仪器的智能控制系统来实现微电网的智能控制[11-12]。
1 微电网运行的功率跟踪控制
1.1 微电网架构
典型的交流微电网架构如图1 所示[13]。该交流微电网为放射型拓扑结构,将光伏发电系统、蓄电池系统连接于交流母线。智能控制系统上位机通过光伏和蓄电池的变流器控制终端,采集光伏发电系统和蓄电池系统的电气参数,实现交流微电网的智能监测与控制。

图1 交流微电网架构
1.2 光伏电池控制模型
光伏电池的输出模型为:

式中,PSy为y状态光伏电池模块的输出功率;say为y状态的平均太阳辐照度;F为填充因子;N为光伏电池模块数;TCy为y状态的光伏电池温度;TA为光伏电池安装现场环境的温度;Kv为电压温度系数;Ki为电流温度系数;NOT为光伏电池的标称工作温度;VOC与ISC分别为光伏电池的开路电压和短路电流;IMPP为光伏最大输出功率下的电流;VMPP为光伏最大输出功率下的电压。
根据式(1)~(5)可得到在温度和太阳辐照度一定的情况下,光伏的功率-电压输出特性,如图2所示。

图2 光伏功率-电压输出特性曲线
由图2 可知,固定温度与太阳辐照度,光伏输出功率随着电压增大而先增大后减小,从而存在最大功率点;但最大功率点随着太阳辐照度的变化而改变。在现实环境中,太阳辐照度波动性较大,光伏电池受太阳辐照度和温度的影响而变化,从而将降低光伏电池的转化效率。因此,必须对光伏模块进行最大功率跟踪(Maximum Power Point Tracking,MPPT)。扰动法是MPPT 最常用的控制方法之一,其原理是在光伏电池输出端施加周期性的电压扰动,根据输出功率的变化方向判断下一时段电压扰动的变化方向。当输出功率增加时,下一时段的电压扰动同向叠加;当输出功率减小时,下一时段的电压扰动反向叠加。其流程如图3所示[14]。

图3 基于扰动法的光伏MPPT算法流程
1.3 逆变器控制模型
1)通用控制方法
控制方法主要有3 种:PQ控制、V/f控制和Droop控制[15-16]。3 种控制方法的有功-频率和无功-电压特性曲线如图4 所示。假设分布式电源初始运行点为H点,此时分布电源输出功率为P0、Q0,系统的电压为U0,频率为f0。

图4 逆变器常见控制方法
PQ控制即运行过程中,保持逆变器输出有功、无功功率为设定值。当负荷增加(减少)时,分布式电源的运行点将从H点沿PQ控制的竖直曲线下降(上升),输出功率仍为P0、Q0,但此时输出电压的幅值和频率将下降(上升)。
V/f控制即运行过程中,保持逆变器交流侧输出电压幅值和频率为设定值。当负荷增加(减少)时,微电源的运行点将从H点沿V/f控制曲线水平向右(左)移动,保持输出电压U0与频率f0稳定。
Droop 控制即运行过程中,根据有功-频率和无功-电压特性曲线自动调节分布式电源输出功率,进行电压和频率控制,从而达到综合的控制效果。当负荷增加(减少)时,分布式电源输出的有功、无功功率将增加(减少),同时输出侧电压和频率均略有下降(上升)。
2)逆变器控制方法
光伏受天气、光照强度影响,输出功率波动性较大,因此不能作为主电源。光伏只需根据PQ控制维持稳定的功率输出,通过MPPT 算法实现最大功率点的跟踪,并最高效率地利用太阳能。微电网主要有并网和离网两种运行模式。在并网模式下,微电网的电压、频率可由交流电网维持稳定;在离网模式下,需要其他分布式电源作为主电源,以维持电压、频率的稳定。该文的新型微电网离网模式下主电源为蓄电池系统,采用V/f控制和Droop 控制相结合的方法。蓄电池系统优先采用Droop 控制方法,当微电网的电压和频率偏差大于一定阈值时,控制方法由Droop 控制切换为V/f控制。
2 基于虚拟仪器的智能控制系统
2.1 虚拟仪器的概念
虚拟仪器与传统仪器的结构对比如图5 所示。传统仪器的数据采集、信号处理、结果显示、仪器控制均是通过硬件设备实现的。传统仪器以硬件设备为核心,各个硬件部分之间的兼容性差且功能单一,综合运行维护成本较高。

图5 虚拟仪器与传统仪器对比
虚拟仪器是指利用计算机软件程序设计人机交互界面,实现仪器的监测、控制等各项功能。虚拟仪器以软件为核心,具有更低的开发维护成本且造价低廉,经过简单配置后可重复利用,开放性强、配置灵活,且可以通过软件自定义各种仪器功能。
2.2 智能控制
该文系统结构如图6 所示。其中,虚拟仪器主要由硬件和软件两部分组成。硬件部分包括信号采集电路、GPIB 接口仪器、串口仪器、并口仪器、VIX 仪器以及其他计算机硬件接口等,实现了数据采集、传输和管理;软件部分包括驱动程序、应用程序与虚拟面板程序等,实现了数据处理、分析、结果显示和控制交互。虚拟仪器监测与控制的对象包括光伏控制终端、蓄电池控制终端以及微网并网点控制终端。
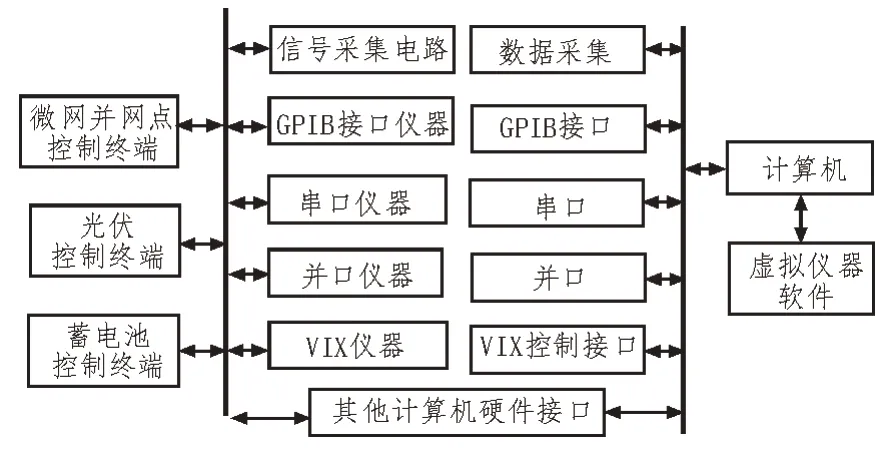
图6 基于虚拟仪器的新型微电网运行智能控制系统结构
2.3 智能控制系统的功能
基于虚拟仪器的新型微电网运行智能控制系统功能架构如图7 所示。其主要包括4 个方面:

图7 智能控制系统功能架构
1)主界面操作模块:实现人机交互功能,包括数据、波形的显示以及监测人员参数、范围的设定操作界面;
2)微电网运行参数监测:实现微电网电压、频率、功率等电气参数的采集、显示和存储;
3)开关控制模块:实现并网开关、微电源控制器开关以及控制模式切换开关的智能控制;
4)协调控制模块:实现微电网能量管理以及协调控制策略的执行。
3 算例分析
为验证基于虚拟仪器的新型微电网运行智能控制系统的功能,该文进行以下仿真实验:0 s 时,微电网处于并网运行模式,负荷1 投入运行,蓄电池系统处于断开状态;0.5 s时,蓄电池系统投入运行,微电网由并网运行模式切换为离网运行模式;1 s 时,负荷2投入运行。其中,负荷1参数为P1=15 kW,Q1=5 kVar;负荷2 参数为P2=10 kW,Q2=5 kVar。
仿真实验过程中,蓄电池系统输出的有功功率、无功功率以及系统的电压和频率如图8所示。可以看到,在0~0.5 s 期间,微电网处于并网运行,其电压和频率由交流电网维持,稳定维持在50 Hz 和219.6 V。0.5 s 时,微电网切换到离网状态,蓄电池系统采用Droop 控制,系统频率下降至49.95 Hz,电压下降至219.4 V。1 s 时,负荷2 投入运行,系统频率和电压进一步下降,频率为49.85 Hz,电压为219.2 V。由于系统频率偏差超出了允许范围,并且持续了一定的时间,所以1.5 s 时,蓄电池系统切换至V/f控制,系统频率和电压上升至设定值,其频率为50 Hz,电压为219.5 V。

图8 微电网智能控制运行曲线
4 结束语
文中给出了典型微电网架构分析光伏电源以及逆变器的控制原理,并在此基础上提出了一种智能化的微电网运行控制系统设计方案,系统化地完成了整体和功能架构设计。仿真结果表明,文中所提出的智能控制系统能够实现微电网并网/离网的无缝切换,并通过蓄电池系统控制模式的智能切换维持离网状态下电网的稳定性。
