并联式混合动力汽车转矩实时分配控制策略研究
2022-03-15吴静波李明明郭志军卢耀真
吴静波,李明明,郭志军,卢耀真
(1. 河南省汽车节能与新能源重点实验室,河南洛阳 471000; 2. 河南科技大学 车辆与交通工程学院,河南洛阳 471000)
能量管理控制策略是混合动力汽车的关键技术,对降低燃油消耗和尾气排放有着显著的效果,目前已经成为了众多学者竞相研发的热点。文献[1]针对混合动力汽车在模式切换时,发动机与驱动电机对需求转矩响应时间的不同,会对车辆造成冲击产生动态油耗,提出了模型预测控制策略,通过仿真模型验证,取得了良好的控制效果。文献[2]为实现档位选择和功率分配的协同优化,利用马尔科夫链模型预测未来时域内的车速,并和基于规则的控制策略进行对比,模型预测控制策略的燃油经济性大大提高。文献[3]指出混合动力汽车在未来时域内的需求转矩,将会按照指数函数的形式递减,因此,建立了线性的优化控制模型。文献[4]提出了智能模糊控制策略,利用遗传算法优化控制参数,通过定义的输入和输出,合理调整发动机与电机的转矩分配。文献[5]主要阐述了模型预测控制的优势,通过预测未来时域内驾驶员的行为,对需求转矩进行合理分配。目前大多数的能量管理控制策略研究,仅仅关注优化发动机的工作区间或模式之间的转换,尽可能保证发动机的效率达到最优[6]。但是,对于混合动力汽车而言,发动机效率最优并不代表车辆的整体效率最优,很多忽视了电池的使用寿命对车辆达到整体效率最优的影响。
针对以上存在的问题,本文以P2构型混合动力汽车为依托,在利用马尔科夫链模型预测需求转矩的基础之上,增加模糊控制算法来解决非线性控制问题,同时引入了转矩分配因子的概念,通过在线调整转矩分配因子,将需求转矩在发动机与电机之间进行实时分配,在保证发动机效率达到最优的同时,避免电池充放电电流过大对使用寿命造成损害。由于采用了模型预测的控制方法,转矩分配的实时性也得到了很大的提高。
1 P2构型混合动力系统
1.1 混合动力系统的总体布置
本文以P2构型的混合动力车辆为研究对象,该车的传动系统结构为同轴并联式结构,如图1所示,主要零部件包括:柴油发动机、异步电机(ASM)、动力电池、DCT变速箱、主减速器、差速器。
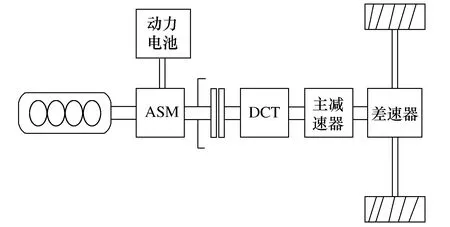
图1 并联式混合动力系统结构示意图
由于发动机与电机同轴相连,电机可以辅助发动机满足较大的瞬时需求功率,而且可以通过离合器的开闭,进行多种模式的切换。整车与零部件的参数如表1所示。
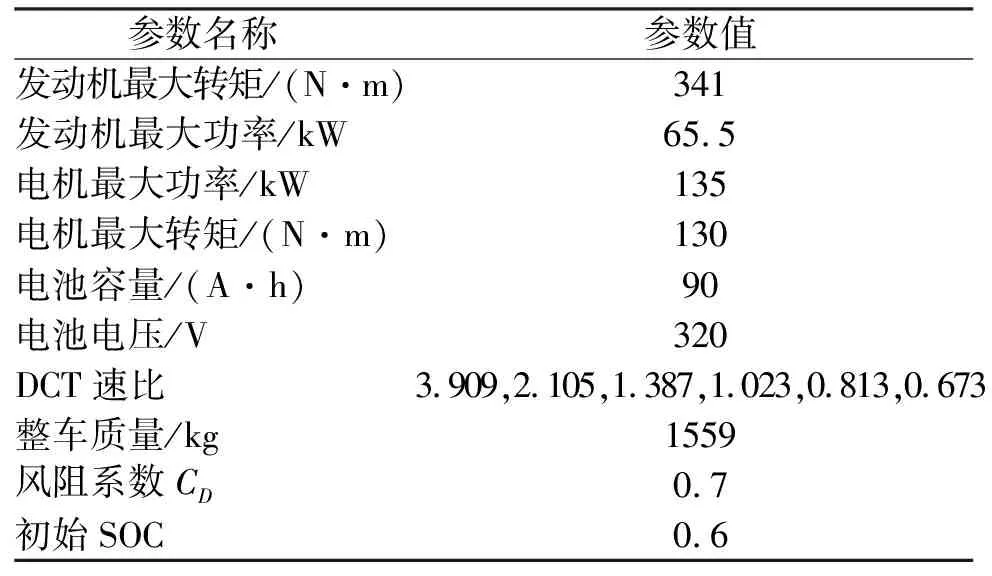
表1 整车与零部件参数
1.2 车辆动力学模型
以车辆动力学公式为基础,建立了并联式混合动力汽车的动力学模型,表达式为:

(1)
(2)
ωe=ωLi0h
(3)
(4)
式中:τL为车轮需求转矩;vv为行驶速度;ρair为空气密度;R0为滚动阻力系数;α为坡度角;Cd为空气阻力系数;A为迎风面积;mν为整车质量;g为重力加速度;ωL为车轮转速;r为车轮半径;i0为换挡速比;ωe为发动机转速;τe为发动机转矩;η为传动系统效率。
1.3 动力系统数学建模
发动机模型的建立,一种是以试验数据为基础的试验建模,另一种则是理论建模。本文利用通过试验获得的数据,建立发动机模型,发动机燃油消耗Map如图2所示,主要是转速、转矩和燃油消耗率之间的函数关系。
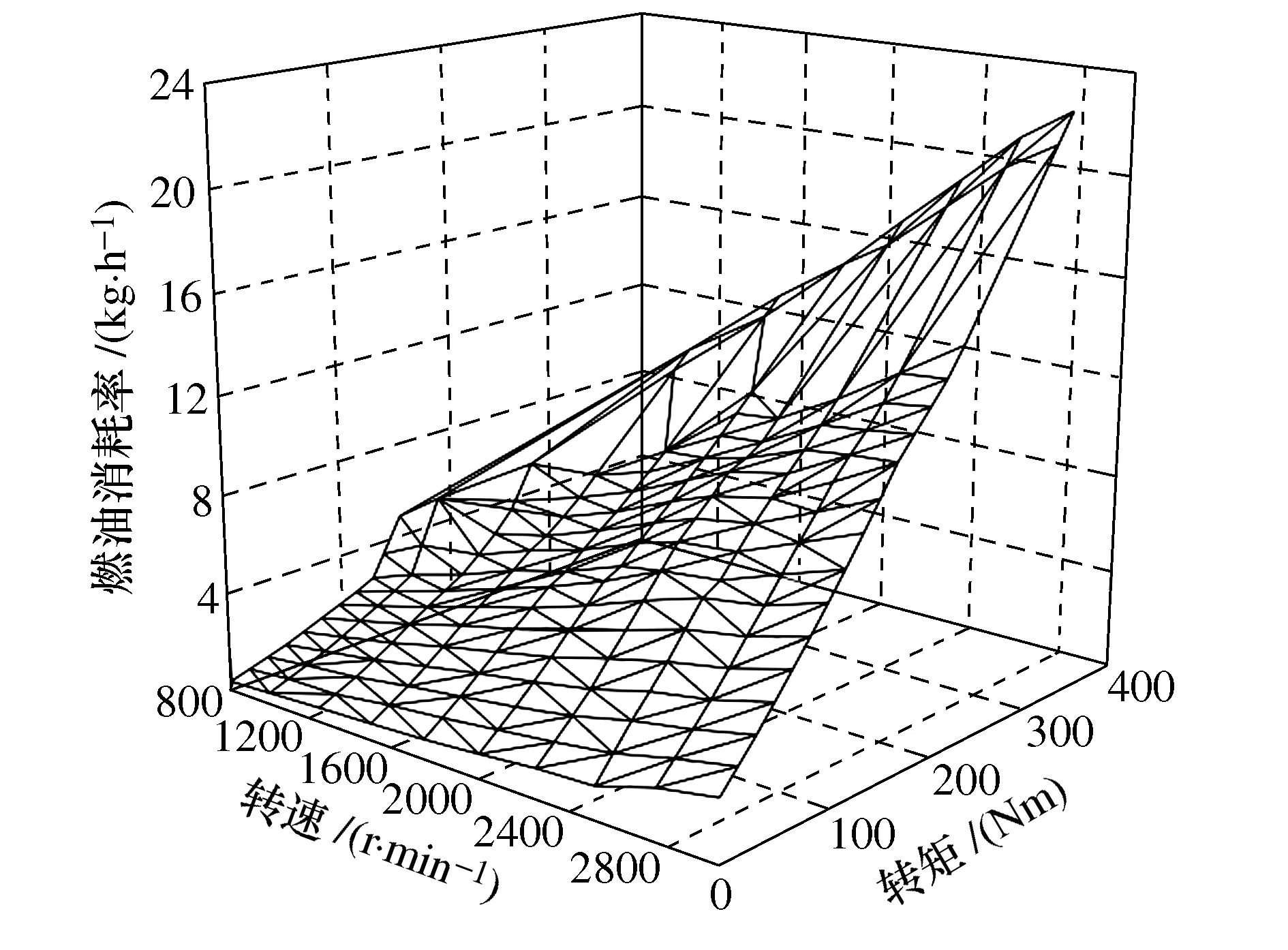
图2 发动机燃油消耗图
驱动电机选用异步电机,电机系统效率Map如图3所示,主要是电机转矩、转速和工作效率之间的函数关系。
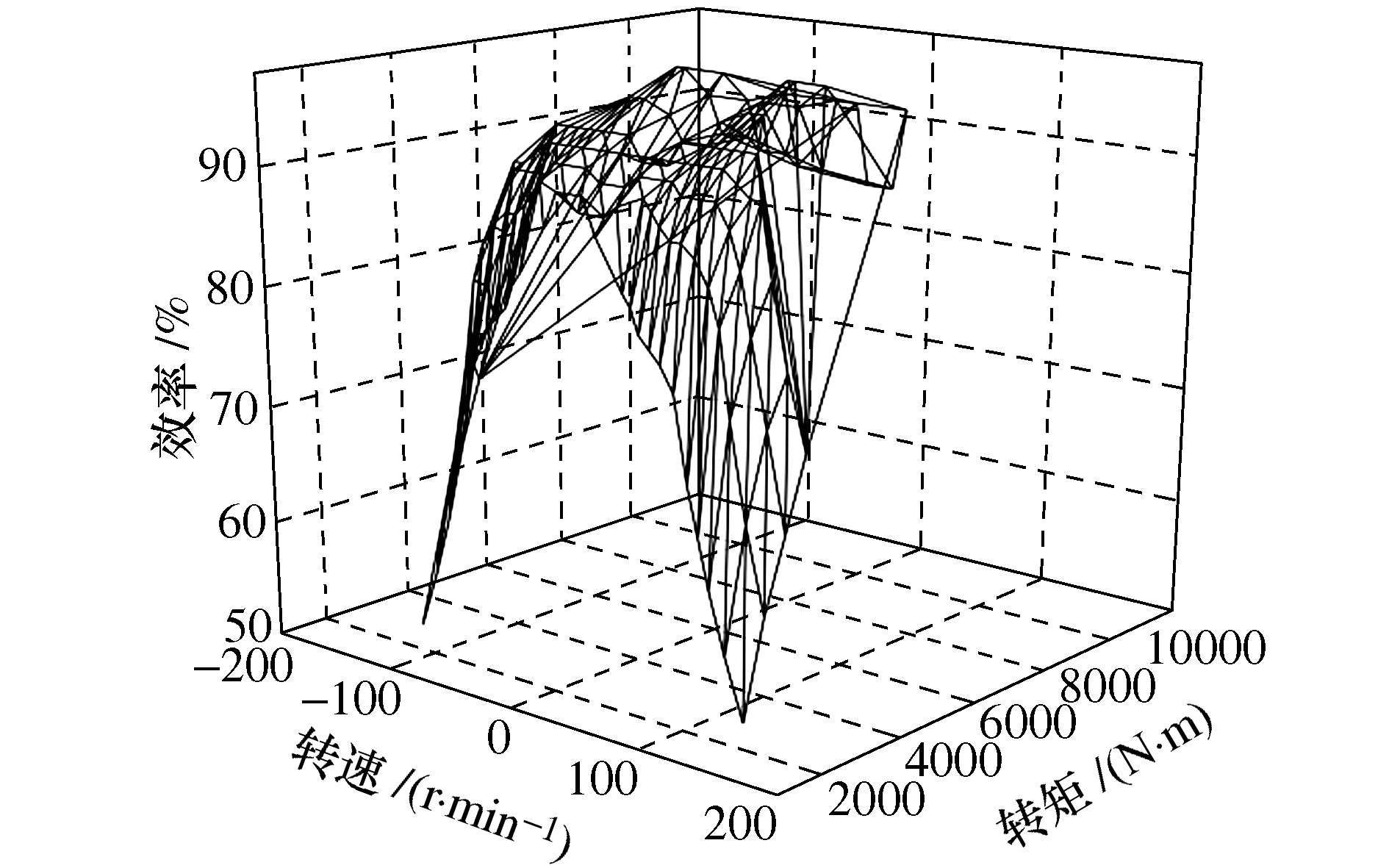
图3 电机效率特性图
1.4 电池模型
动力电池的标称容量为90 Ah,额定电压为320 V,可以将开路电压和等效内阻串联组成的等效电路比作电池组,开路电压和等效电阻表示为电池SOC的函数,单体电池特性如图4所示。
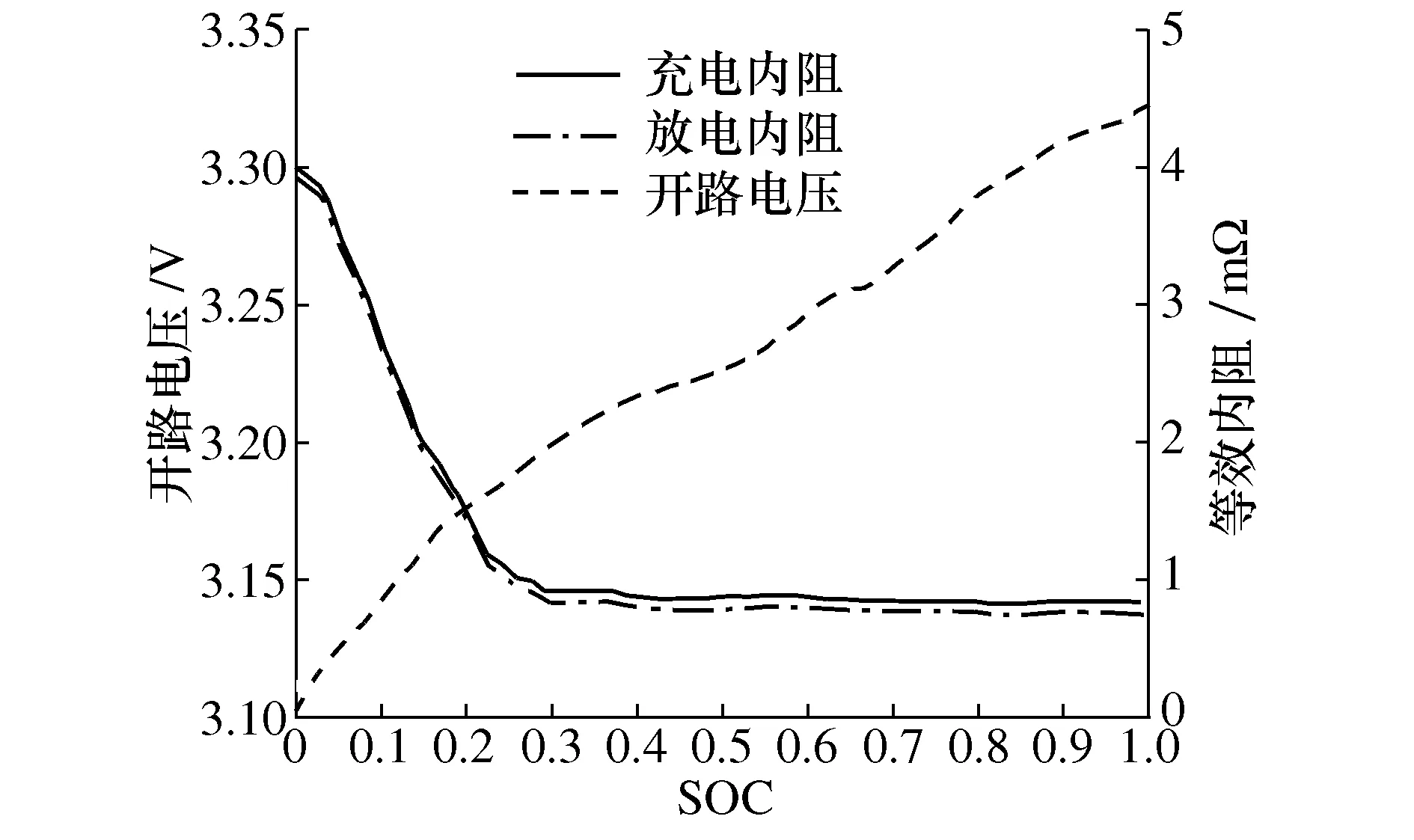
图4 单体电池充放电内阻和电压随SOC的变化关系
2 基于马尔科夫链模型预测需求转矩
以全球轻型车测试规程(WLTP)的工况特征为例,进行马尔科夫链模型预测需求转矩的研究。经过模型预测得到未来一段时域内的需求转矩,可为下文设计模糊控制器的实时性奠定基础。本文以并联式混合动力汽车为研究对象,由于发动机和电机以转矩耦合的方式,对外输出动力,驱动轮的需求转矩可以看作车辆的需求转矩,在未来时域内,驾驶员通过操纵加速踏板和制动踏板来控制输出转矩的大小,其值是未知的,但能将其看作具有随机性质的马尔科夫过程,即未来时域内的需求转矩只和当前状态的需求转矩有关,与之前的状态无关[7],将未来时域内的需求转矩视为一种概率分布,而概率分布可以从过去的行车数据或标准工况中提取和归纳。
混合动力汽车行驶属于时间连续,状态离散的过程,将需求转矩离散为有限个数列,即
Treq={Treq1,Treq2,Treq3,…,Treqs}
(5)
在N时刻需求转矩为Treqi的前提下,N+1时刻需求转矩为Treqj的转移概率可表示为
Pi,j=Tr{Treq(N+1)=Treqj|Treq(N)=Treqi}
(6)
依据本文采用的WLTP循环工况,经过式(1)~式(4)的计算,可得出各个时刻驾驶员的需求转矩,Pi,j的值能通过最大似然预测法确定,则
(7)
(8)
i,j∈(1,2,…,i)
(9)
式中:Mi,j为需求转矩从i转移到j的次数;Mi为需求转矩从i转移的次数之和。
图5为在统计了WLTP工况的情况下,得到的转移概率矩阵,本文选择预测时域为t=15 s。
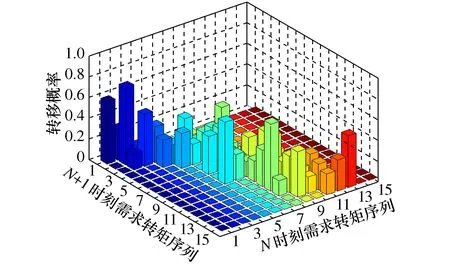
图5 马尔科夫转移概率矩阵
3 基于转矩分配因子的控制策略研究
能量管理控制策略研究的难点问题为需求转矩在两个动力源之间实时的合理分配。本文首先引入转矩分配因子的概念,在电量消耗模式时,利用转矩分配因子来调节混合动力系统中发动机工作点的分布情况,进而控制发动机的输出转矩在整个需求转矩之中所占的比例。在行车充电时,通过调整转矩分配因子来控制发动机向动力电池输出充电转矩的大小。由于未知的工况和控制目标的非线性,将需求转矩在两个动力源之间进行实时分配是非常复杂的[8],本文采用马尔科夫链预测模型,预测未来一段时域内的需求转矩,然后利用模糊控制器对于解决非线性控制问题,有着很好控制效果的优点[4],调整模糊控制器的输出值,对需求转矩进行合理的分配。该控制器设计的基本原则为发动机与驱动电机工作在高效区的同时,保证电池的充放电在合理范围内,避免在运行过程中,电池充放电电流过大对使用寿命造成损害[9-10]。
3.1 模糊控制器的设计
模糊控制器主要采用Mamdani和Takagi-Sugeno模型。本文研究的转矩分配因子α不是一个连续变量,而是一个具体的数值[4],因此,选用T-S模型对非线性系统进行建模。
如果能够预知未来一段时域内车辆的需求转矩,则可以提前对其进行合理的分配[11],进而提高需求转矩分配的实时性,本文通过马尔科夫链预测模型对需求转矩进行预测,以电机目标转矩占总需求转矩的百分比作为输入1,电池SOC值作为输入2,即:

(10)
Input2=SOC
(11)
式中:Treq为车辆需求转矩,TEng为发动机目标转矩,其值可以通过式(4)获得;SOC为电池的荷电状态。
转矩分配因子α作为模糊控制器的输出,即Output=α,可以通过改变其输出值,决定发动机的目标转矩占总需求转矩的比例,得出实际的发动机转矩,转化为驱动力或向动力电池充电。通过模糊控制器的输入和输出对需求转矩进行分配的整体流程图,如图6所示。
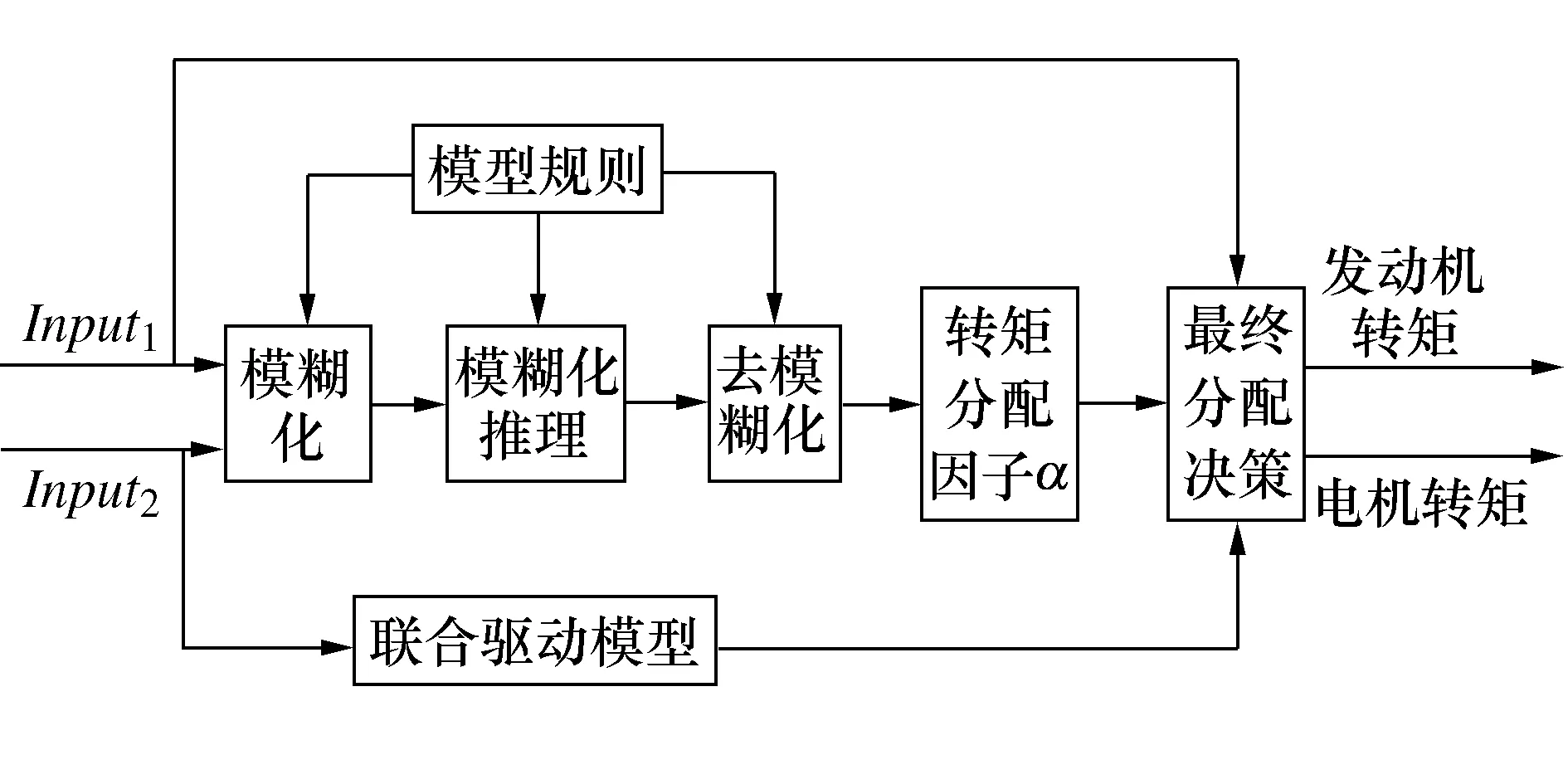
图6 基于模糊逻辑控制器对需求转矩进行分配的整体流程图
3.2 模糊控制规则的设计
依据并联式混合动力汽车的工作模式以及电机的动态特性,对应Input1的模糊子集设置为{NL1,NS1,O1,PS1,PL1},处理后的模糊化论域为(0,1),分别代表负大,负小,0,正小,正大。电池SOC经模糊化处理后的论域为(0,1),对应Input2的模糊子集设置为{NL2,NS2,O2,PS2,PL2},依次代表负大,负小,0,正小,正大。
转矩分配因子α作为模糊控制器的输出,可以从{0,0.75,0.80,0.85,0.90,0.95,1,1.05,1.1,1.15,1.25}中提取,这些数值代表了发动机对电池进行充电的程度,例如:输出值0代表发动机不参与驱动,输出值1代表电池SOC值和发动机都工作在合理范围内,不需要进行调整,输出值1.25代表发动机在最大转矩曲线上工作,对电池输出的充电转矩最大。通过在线调整模糊控制器的输出值,实现发动机在较好的燃油经济区域内工作,同时决定了发动机向动力电池输出充电转矩的大小[12],有效防止了为使发动机效率达到最优,而导致动力电池放电电流过大对使用寿命造成损害。为使混合动力系统能够稳定运行,模糊控制规则需要包含该车辆的所有运行模式。本文遵循动力性优先原则,电机优先使用原则,发动机高效率原则和能量回收原则,根据图7和图8的隶属度函数,共制定出25条规则进行控制,建立模糊逻辑规则库,如表2所示。
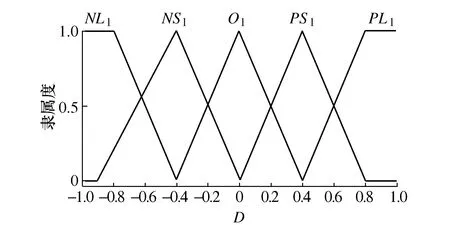
图7 电机目标转矩占总需求转矩的百分比的隶属度函数
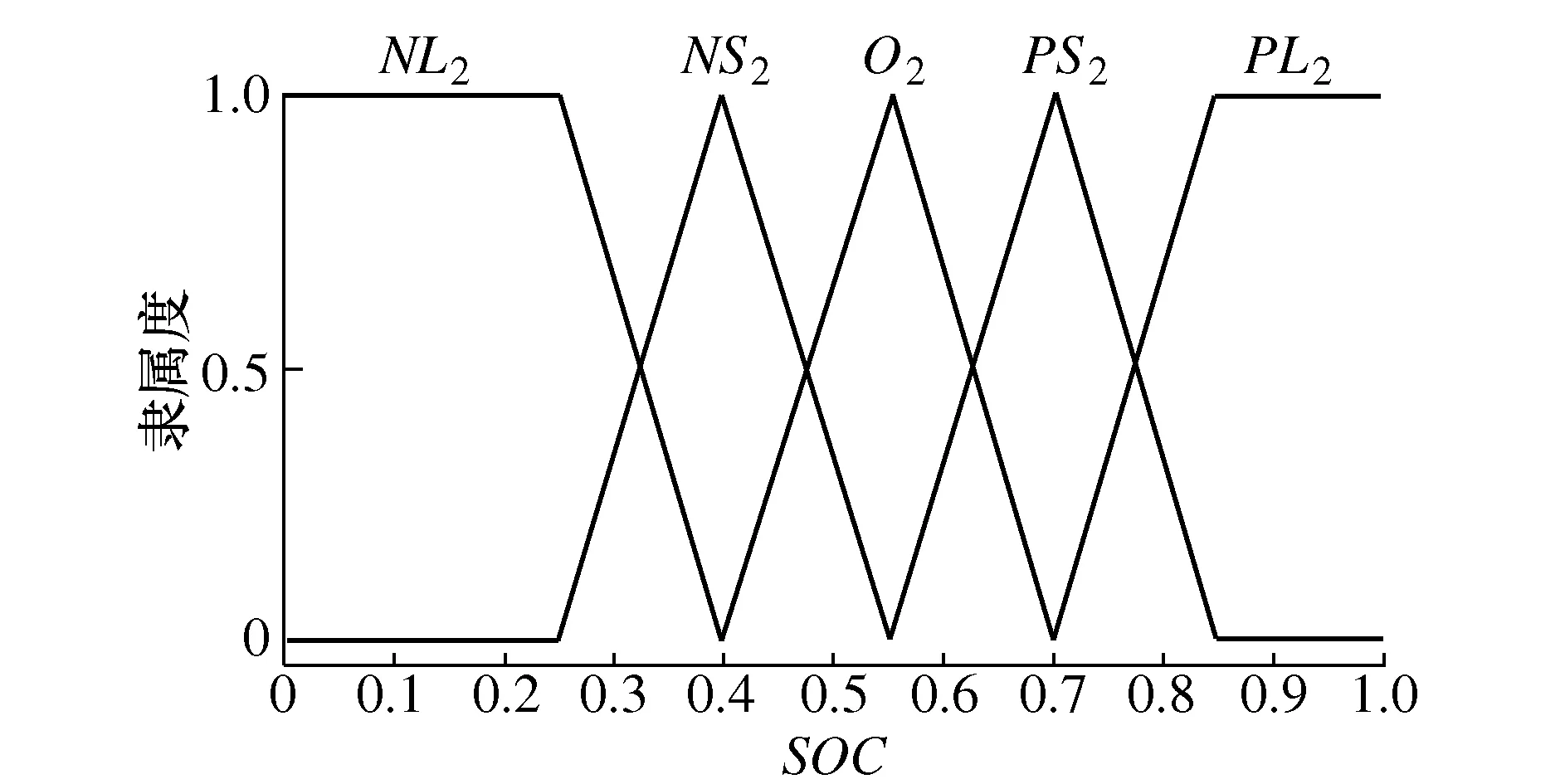
图8 电池SOC的隶属度函数
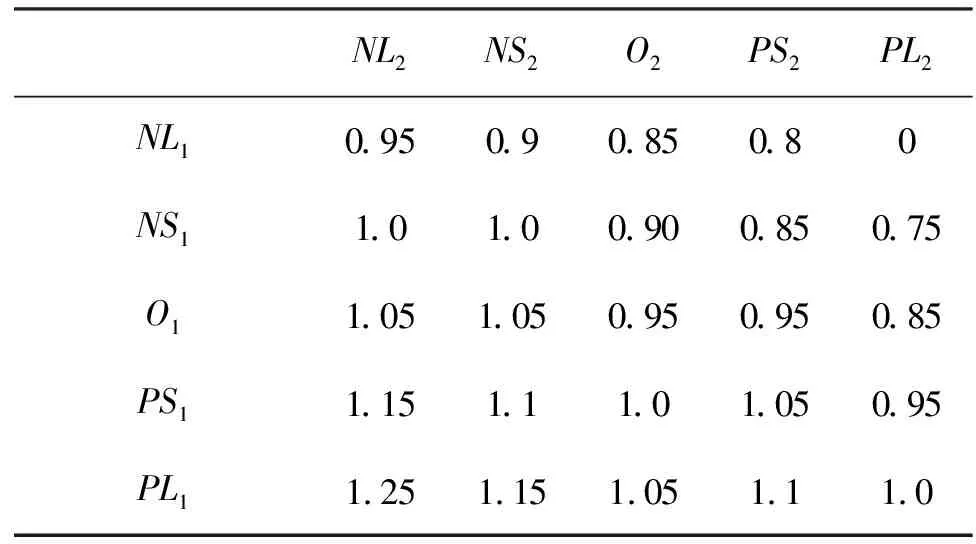
表2 模糊逻辑控制规则
模糊规则的形式为
If(DisNL1andSOCisNL2), then(αis 0.95)
3.3 基于自适应模拟退火算法优化转矩分配因子
模糊控制器中的隶属度函数和控制规则一般来源于专家经验,通常很难获得最优的控制效果[13-14]。因此,本文建立转矩分配因子优化模型,利用自适应模拟退火算法对能量管理优化问题进行求解[15],转矩分配因子的定义为
Teopt-new(ne)=α·Teopt(ne)
(12)
式中:Teopt(ne)为预测时域内发动机输出转矩;Teopt-new(ne)为发动机实际输出转矩。
鉴于在仿真过程中优化结果的分布情况,仿真时间和寻优空间的范围具有一定的界限,为提高实时性,将转矩分配因子的优化区间为
0≤α≤1.25
(13)
式中:0和1.25是转矩分配因子取得的下限值和上限值,该值依据仿真结果和优化时间得到的。
为得到更合理的转矩分配因子α,对能量管理策略优化模型进行约束,即
(14)
式中:ne为发动机转速;Te为发动机转矩;nm为电机转速;Tm为电机转矩。
本文采用自适应模拟退火算法(Adaptive simulated annealing,ASA)对模糊控制器的输出进行优化求解,得出最优的转矩分配因子。ASA主要包括状态空间产生函数、接受当前状态的函数和温度更新函数,将ASA的能量表述为等效百公里燃油消耗量E,即优化目标函数,寻求E最小值的过程就是优化转矩分配因子α的过程。

(15)
Be(k)=f(α·Teopt,ne)
(16)
式中:E为等效百公里燃油消耗量;Be(k)为燃油消耗率;Cb(k)为电量等效燃油消耗率;S为行驶的路程;K为时间阶段;N为总的时间阶段数。
含有M个变量的状态空间产生新的目标函数的概率密度函数为

式中:M为每一个温度下变量的维度;y={yi:i=1,…,M};Ti为绝对温度,ui服从均匀分布。
接受新的目标值的函数为
(18)
式中ΔE=Ek+1-Ek。
温度更新函数为
(19)
式中:T0i为起始温度;mi和ni为调整ASA的自由因子。
基于自适应模拟退火算法优化转矩分配因子的流程图如图9所示。
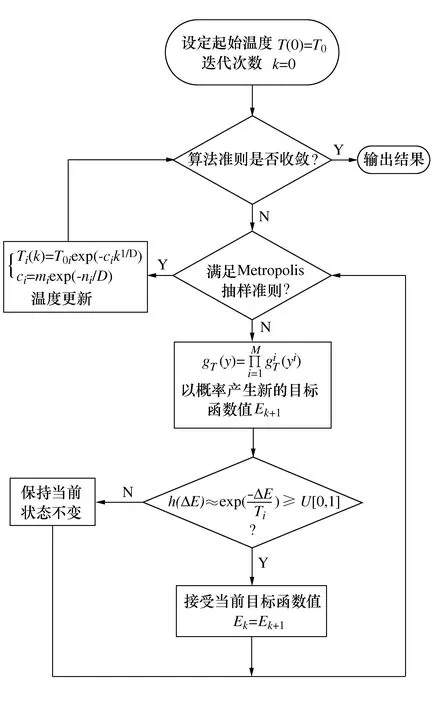
图9 自适应模拟退火算法优化转矩分配因子的流程图
4 仿真结果分析
为了对本文所提出的控制策略进行验证,采用MATLAB/Simulink和Cruise仿真平台对P2构型的混合动力汽车进行建模和仿真,以全球轻型车统一测试规程(WLTP)作为仿真工况,对本文提出的马尔科夫链预测模型编写M程序,并通过建立的仿真模型调用程序,为了减小仿真的时间,本文选择5 s为一个预测时域,采样时间的间隔为1 s,SOC的初始值为0.6,图10为并联式混合动力汽车转矩实时分配的控制策略示意图,通过联合仿真得到仿真结果如图11~图17所示。
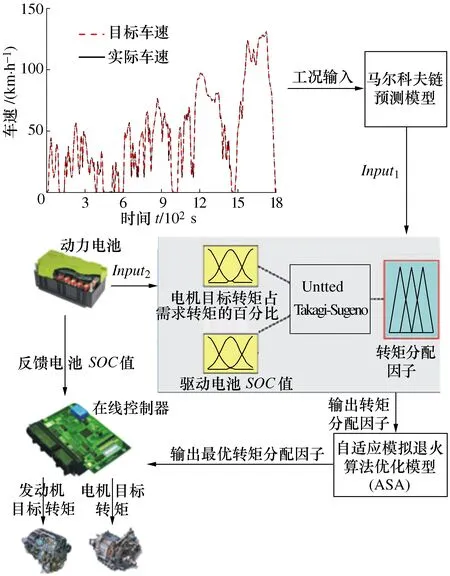
图10 并联式混合动力汽车转矩实时分配的控制策略示意图
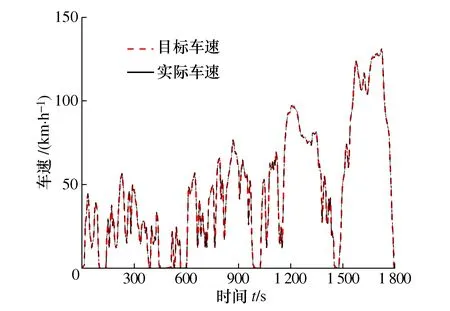
图11 目标车速与实际车速的跟随情况
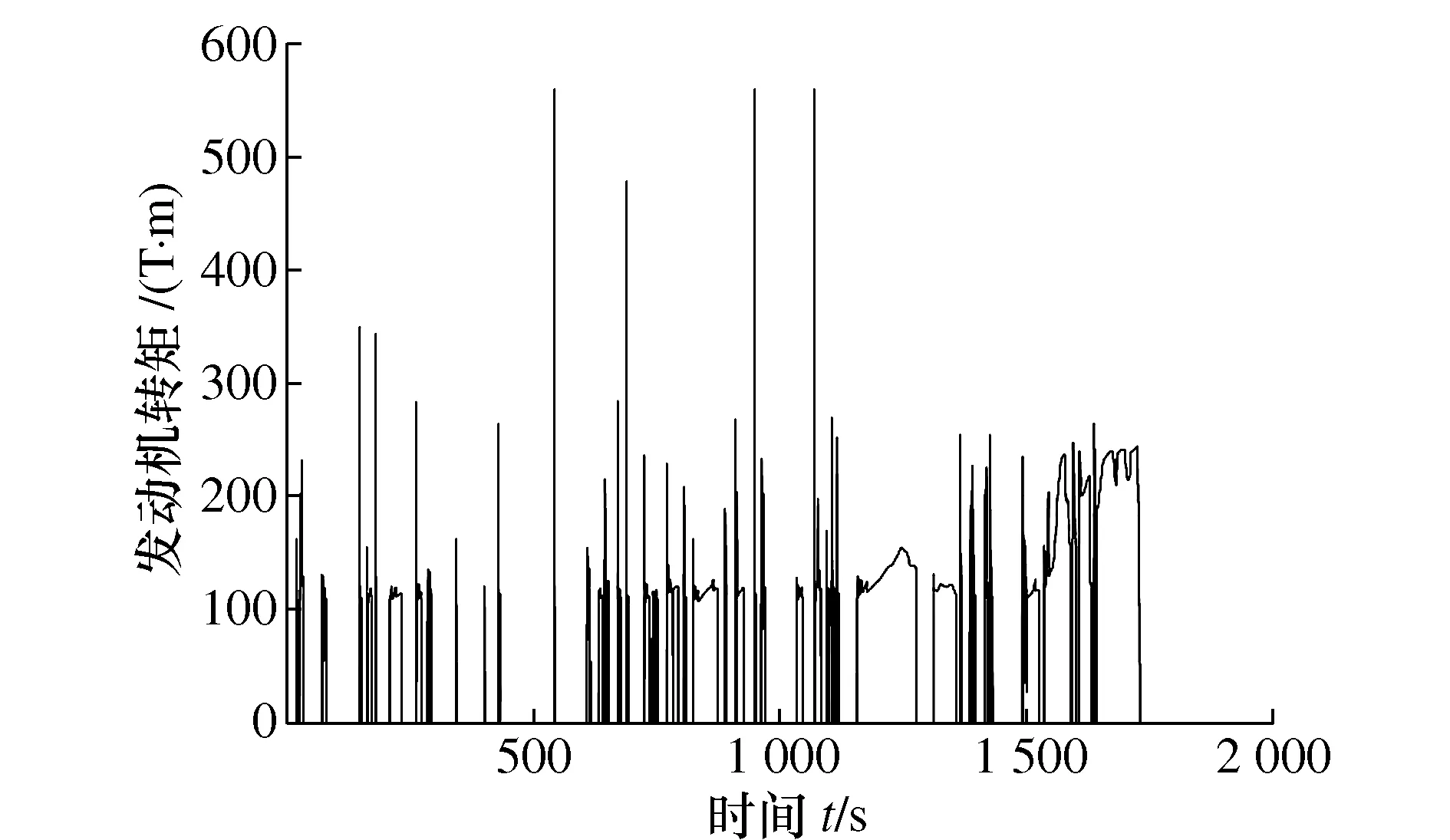
图12 WLTP工况下发动机转矩
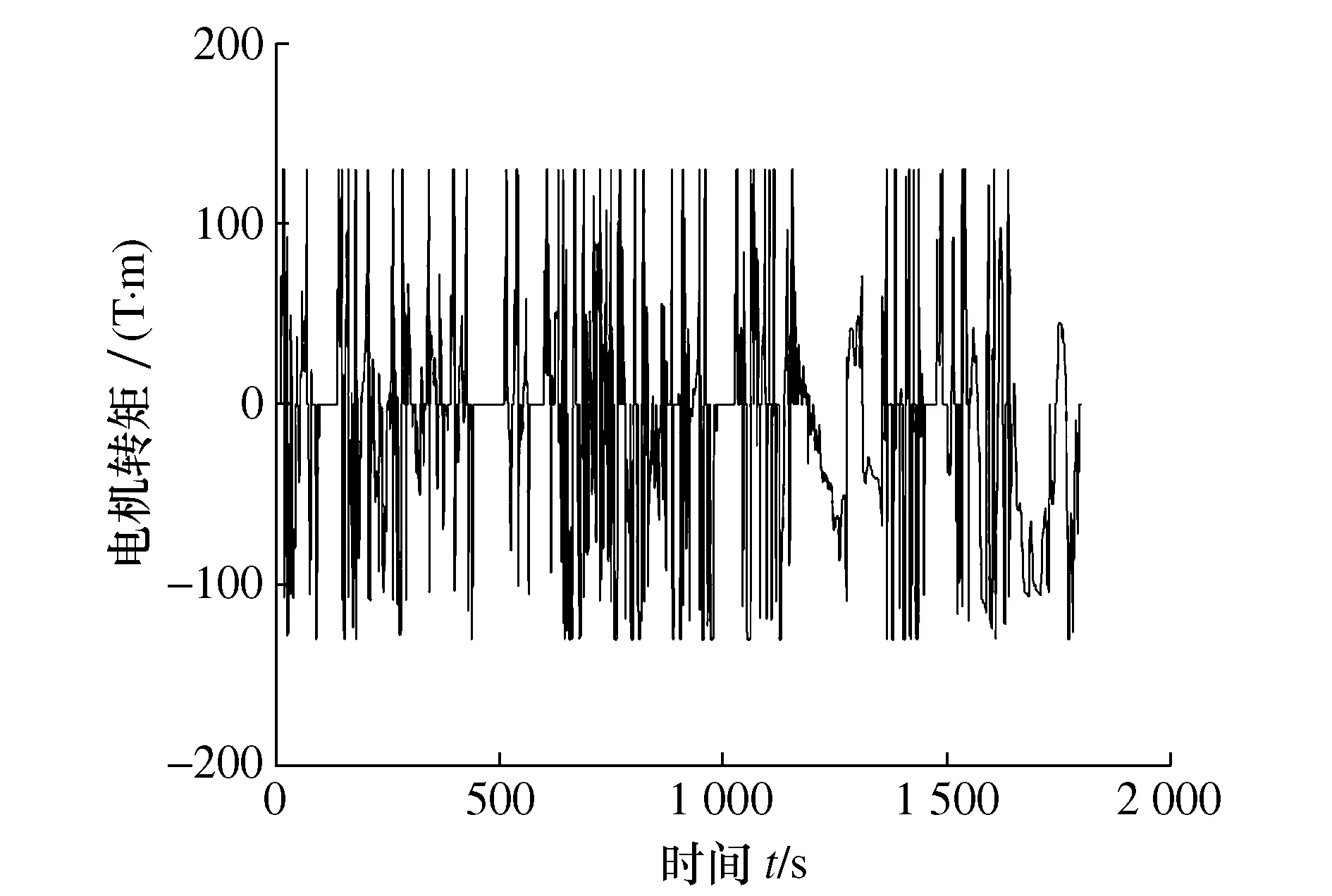
图13 WLTP工况下驱动电机转矩
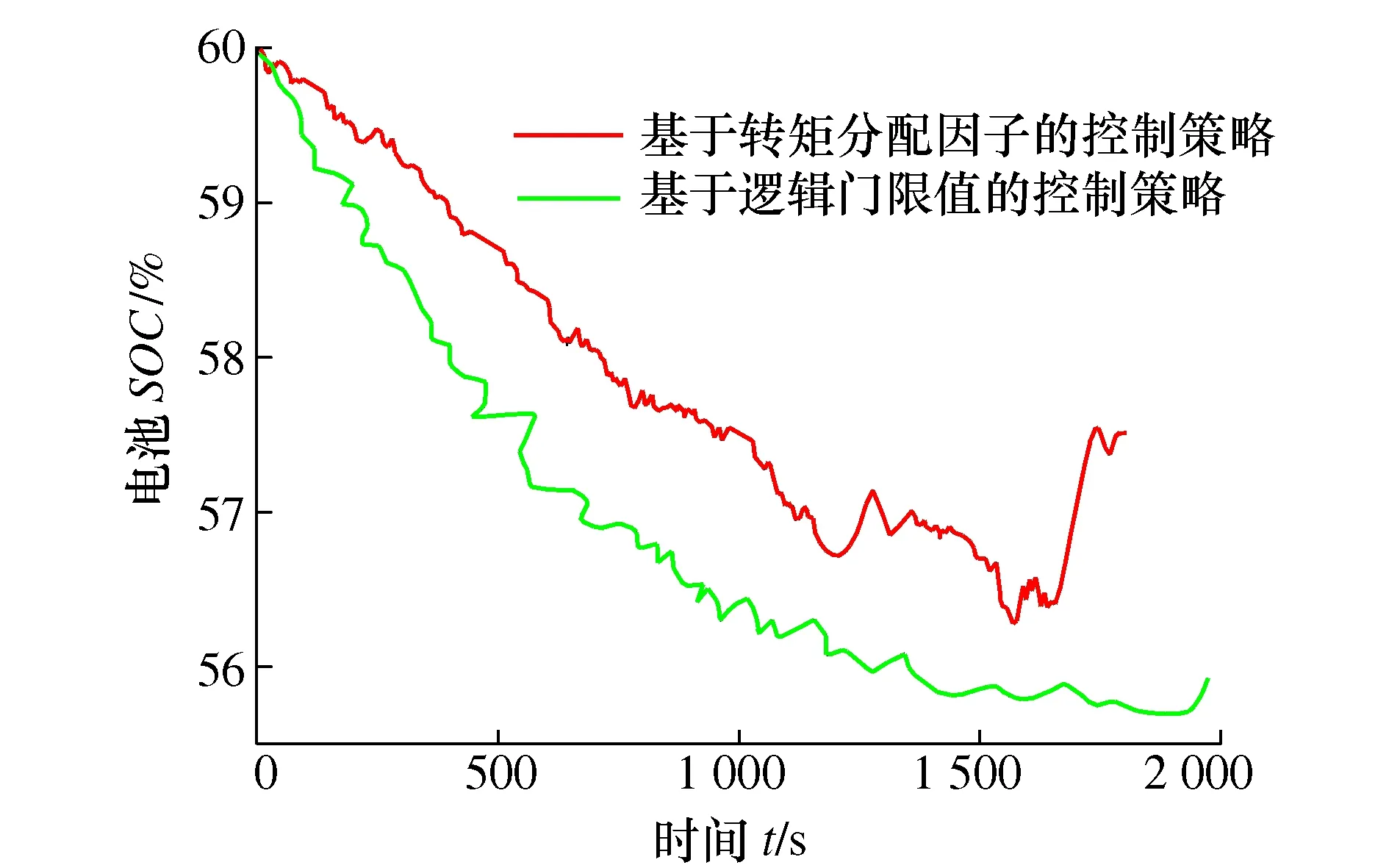
图14 WLTP工况下SOC变化曲
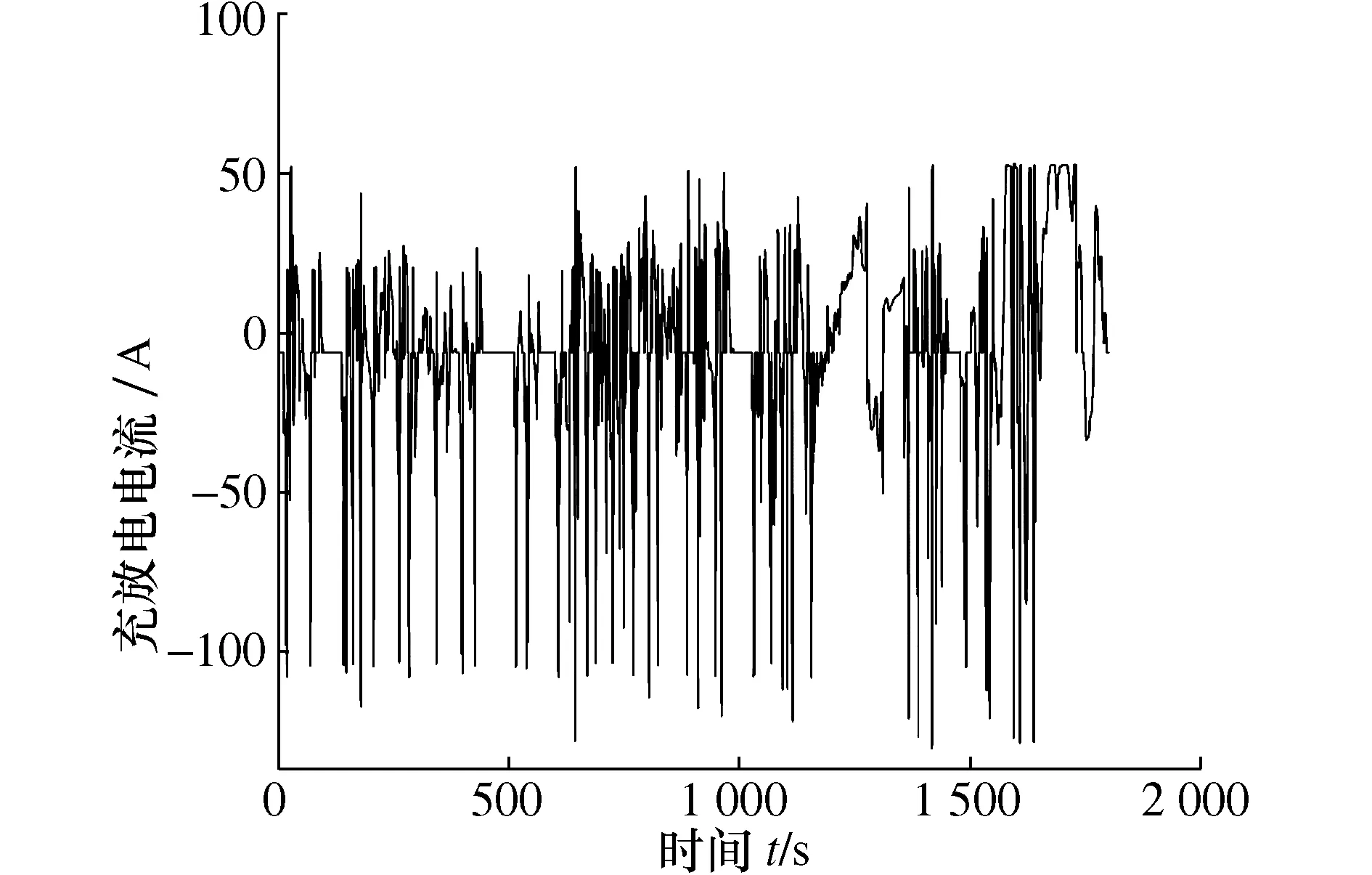
图15 动力电池的充放电电流
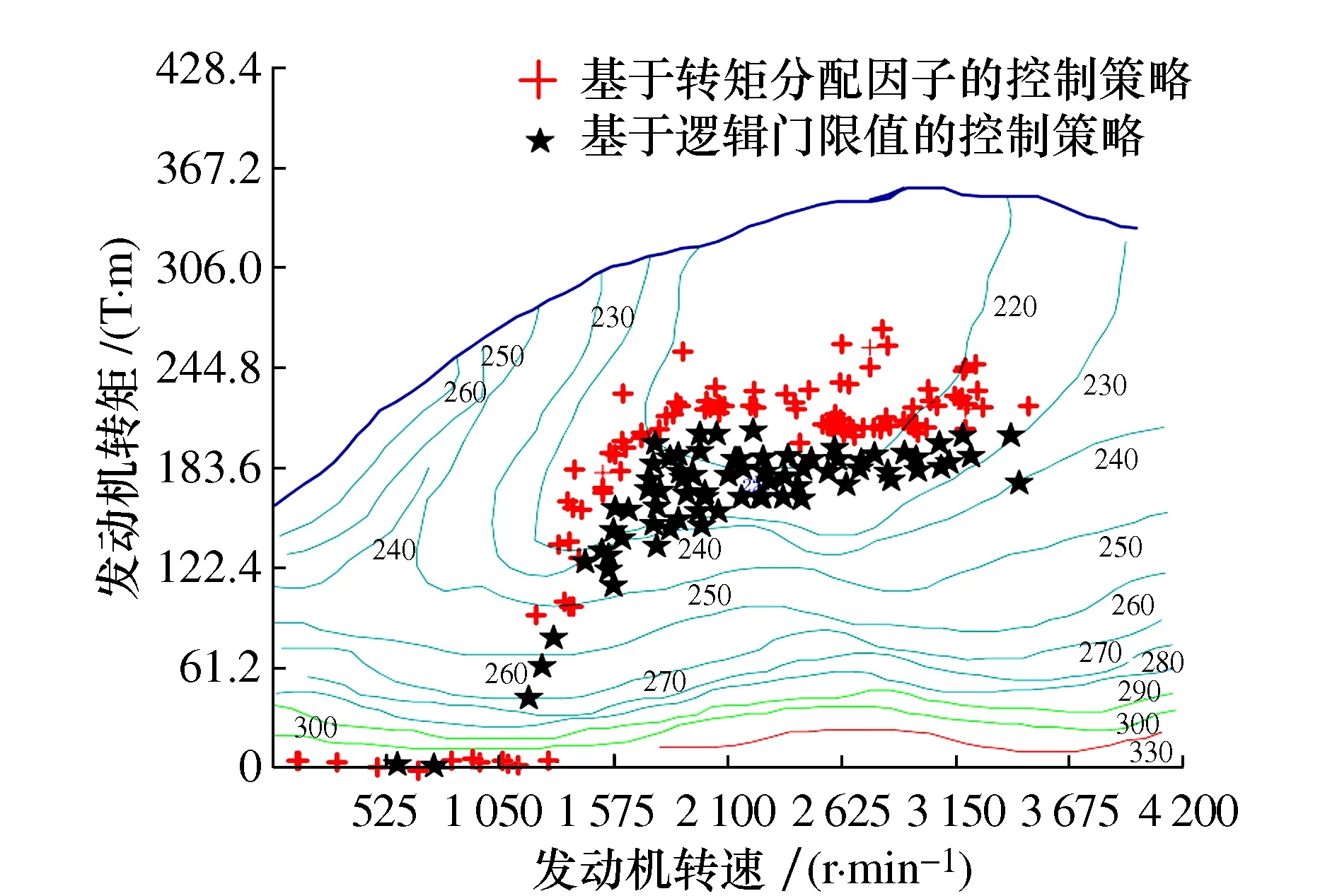
图16 WLTP工况下发动机工作点
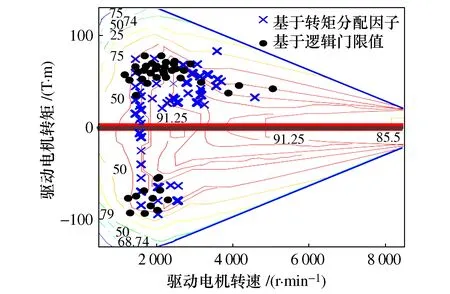
图17 WLTP工况下驱动电机的工作点
图11为在本文提出的转矩实时分配控制策略下的实际车速跟随目标车速的情况,由图可看出,实际车速对目标车速有着很好地跟随效果,满足动力性需求。图12和图13为主要动力部件的输出转矩,图14为动力电池SOC值的变化曲线。当电池SOC>0.565时,混合动力汽车处于电量消耗阶段,主要采用电机驱动车辆行驶,当电池SOC<0.565时,为了防止电池过度放电对使用寿命造成损害,降低车辆的整体效率,发动机开始输出转矩,并通过调节转矩分配因子,控制发动机输出转矩在总需求转矩中所占的比例,并根据当前电池SOC值的大小来决定发动机向动力电池输出充电转矩的大小。同时,当电池SOC值高于设定的最小值时,为了确保发动机在最优效率区工作,应当由电机进行转矩补偿,循环终止时,电池SOC=0.575,与初始值相差无几。整个运行过程中,电池SOC值一直保持在0.56上下,波动范围保持在上下3%以内,而基于逻辑门限值的能量管理控制策略,为了保证发动机尽可能的工作在最优效率区,提高整车燃油经济性,动力电池持续放电,导致电池SOC值下降速度过快,放电电流过大,对电池的使用寿命产生了不利的影响。图15为动力电池充放电时电流的变化情况,从图15中可以看出电流的变化一直保持在合理范围内,说明本文提出的控制策略在车辆行驶过程中,基本上可以实现P2构型混合动力汽车的能量管理,满足了不损害电池使用寿命的目的。
图16和图17分别为发动机和驱动电机在运行过程中工作点的分布情况,由图16与图17可知,与逻辑门限值控制策略相比,本文提出的控制策略能够保证发动机的工作点绝大多数的分布在燃油消耗最小的区域,说明该策略能够改善发动机的燃油消耗。驱动电机的工作点主要分布在0.75~0.9的高效率区域内,具有良好的控制效果。总体可以看出,本文提出的控制策略在不损害电池使用寿命的同时,车辆的整体效率也得到了提高。
通过以上两种控制策略的仿真分析对比,可以得出,由于基于逻辑门限值的控制策略主要依据专家经验设定合理的门限值来限定发动机的工作区域,制定相应的切换规则,未能充分考虑车辆动态时的转矩分配和电池SOC值的波动情况,无法统筹兼顾系统各个部件的综合性能,对提高车辆燃油经济性和改善电池使用寿命具有一定的局限性。
为了更直观的对比有关燃油经济性的优化效果,将本文提出的控制策略与逻辑门限值控制策略进行对比分析,如图18所示,通过马尔科夫链模型对未来时域内需求转矩的预测,以及对转矩分配因子的动态调节,基本上可以实现电池SOC值在合理范围内波动的前提下,混合动力汽车的燃油消耗明显低于采用基于逻辑门限值控制策略下的燃油消耗。
5 结论
1) 鉴于能量管理控制策略的实时性,建立了马尔科夫链预测模型,通过预测未来时域内混合动力汽车的转矩需求,可提前对需求转矩在两个动力源之间进行实时分配,为改善混合动力汽车的燃油经济性和转矩分配的实时性提供理论基础。
2) 以往的能量管理控制策略,大多数仅仅关注如何提高发动机的燃油经济性,然而,针对混合动力汽车而言,发动机的效率最优并不等同于车辆的整体效率最优,本文通过建立模糊控制器,引入转矩分配因子的概念,并利用自适应模拟退火算法对转矩分配因子进行优化,在提高了整车效率的同时,动力电池的使用寿命也获得了改善。
3) 本文有效的结合了模型预测和模糊控制策略两者的优点,既提高了控制策略的实时性,又具有很好地鲁棒性。在MATLAB和Cruise软件中进行联合仿真,验证本文提出的并联式混合动力汽车转矩实时分配的控制策略,在WLTP工况运行过程中,电池SOC一直保持在0.56上下,波动范围维持在与初始值上下3%以内,达到了在提高整车燃油经济性的同时改善动力电池使用寿命的目的。