选煤厂智能巡检机器人的设计与研究
2022-03-14高娟娟
高娟娟
(西山煤电镇城底矿选煤厂,山西 太原 030203)
0 引 言
近年来,随着能源需求的不断增长,煤矿的开采强度也在逐渐加大,选煤厂是煤矿生产系统中最重要的环节,目前国内大多数选煤厂采用的均是流水线作业,如同车轴加工生产线,每一个环节通过中间转运设备彼此连接,实现了从原煤产出到最终分选出不同类型煤的全过程自动化,尤其是在洗涤过程中的关键设备非常容易发生故障,当其中的某台设备发生故障时将会导致整个生产系统出现故障,必须进行停工维修[1]。设备停工对企业的产量和效益影响很大,为保证选煤厂工作效率和避免事故发生,人工巡检是目前采取的主要措施,目前常用的人工巡检主要是通过人工用肉眼进行观察,查看设备的运行状态,通过听声音分析设备可能的故障,通过触摸设备外表面感知设备的温度变化等,最终收集到关于设备的运行数据信息并记录,随后对巡检结果进行报送有关部门进行维修,整个巡检过程时间比较长,工人数量比较多,人工劳动强度比较大,人工巡检成本较大,且在巡检过程中容易受到人为、经验等因素的影响会导致最终巡检效果不理想,存在漏巡检、巡检结果不汇报等问题,严重影响选煤厂的长久安全运行。针对上述问题,通过利用比较先进的机器人技术和故障识别算法,设计了一种选煤厂智能巡检机器人,实现代替人工完成选煤厂设备运行和工作环境巡检,减轻工人的劳动强度、提高工作效率,保证煤矿的产量和企业效益。
1 选煤厂机器人巡检要求
对选煤厂设备进行定期巡检对于保证煤矿安全高效生产具有重要的作用[2],传统的人工巡检方式如图1所示,存在工人劳动强度大、巡检效率低等问题,为此提出智能机器人巡检方案。 巡检技术要求及目标主要有以下方面。

图1 选煤厂人工巡检现场图
(1) 工作环境要求。智能巡检机器人需要代替人工完成选煤厂设备运行状态的巡检,首先需要满足煤矿选煤厂的工作环境要求。选煤厂的实际工作环境比较复杂,长期处于潮湿、多尘和电磁辐射严重的环境中,需要巡检机器人结构本体能够适应复杂的工作环境,不发生电路系统故障和运行故障。
(2) 人工与智能融合。按照人工巡检的基本要求,智能巡检系统需要融合人工巡检的所有功能,包括机器人自移动功能,实现自主行走,同时在运行过程中对环境中对有毒有害气体的检测、设备表面的温度变化检测、设备运行声音的检测、运行设备运行过程中的动态监测等全方位检测。
(3) 信息采集与分析。智能巡检机器人需要准确提取故障信息并对所获故障信息进行分析,判断出故障的类型并及时进行报警维修。综上,为保证实际巡检的设计应用效果,利用先进技术,包括视频成像技术、红外线热成像技术、烟雾检测技术等多种技术相互融合,通过机器人本体模块实现对所有参数信息的采集和分析,开发出友好的人交互界面,对巡检机器人本体信息所处环境和采集故障信号等通过网络通讯系统进行上传,最后在监控系统中显示实际巡检效果,满足选煤厂设备的巡检要求。
2 选煤厂智能巡检机器人总体方案设计
选煤厂智能巡检机器人的设计需要解决行走、故障检测、无线通讯和上位机显示四大问题。机器人行走机构目前常用的主要有轮式行走、履带式行走、足式行走和轨道式行走,由于煤矿选煤厂环境比较复杂,车间内设备众多,且车间内地面铺设有用于转运煤的轨道等,加上选煤厂选煤工艺复杂需要使用大量的设备,地面空间相对较少,采用传统在地面行走机构并不适合巡检机器人。通过对国内孟家窑煤矿选煤厂进行深入实际调查,最终得出可以利用车间上方空间进行巡检,通过在设备上方铺设轨道系统,将机器人布置在轨道上可以实现自动行走从而完成巡检任务。图2所示为本次设计的选煤厂智能巡检机器人系统方案。

图2 选煤厂智能巡检机器人本体方案
选煤厂智能巡检机器人主要包括支撑机器人的轨道系统和机器人本体两部分组成,如图2所示,此外巡检机器人本体上安装有传感器监测装置、无线通讯发送与接收装置、大容量可充电里锂电池等部分。利用轨道式行走可以较为精确控制机器人的运动路径,通过在半空中对设备进行巡检能够获得更大的巡检覆盖面积。
如图2所示的传感器模块。巡检机器人本体搭载的多种传感器,主要包括温度传感器、CH4传感器、烟雾传感器、CO传感器、CO2传感器等多种传感器用于采集环境的温度和有毒有害气体浓度的数据;搭载有红外线成像仪,通过对设备表面的温度进行远距离检测从而识别温度变化故障。同时在图像测温系统上,主要采用的是热成像网络智能摄像机,可以得到可见光的最大分辨率达到了1 900×1 000,图像非常清晰,可以直接获取到设备运行状态清晰数据。
巡检机器人支撑系统是以轨道作为核心,通过在车间上方架设运行轨道,即工字型梁,将巡检机器人布置在轨道上,利用轨道下翼缘板作为机器人的支撑,设计了轮式行走机构,多个轮卡在下翼缘侧方,利用步进电机驱动移动轮实现在轨道上的运行,相比于传统的履带式或轮式行走机构,轨道式行走可以有效利用空间资源,对选煤厂车间进行全方位巡检。如图3所示为轨道系统连接图。

图3 轨道连接结构图
如图所示的轨道系统是由高强度的铝合金导轨拼接而成,轨道平台的实际要求承载重量为机器人的自重,大约为60 kg以上,在每隔3 m左右安装一个轨道固定支架,用于对轨道的支撑,连接结构可靠、轨道自重较小,可以根据车间的实际情况随意布置,包括转弯、坡度、直线均可以实现,运动范围更大,巡检效果更好。
3 选煤厂智能巡检机器人无线通讯系统设计
网络通讯系统是实现将现场的图像、声音等信息传送到上位机的关键环节,也是保证巡检过程高效最重要的环节。巡检机器人本体自身具有信号发射装置,用现场的光纤通信传输网络的光缆和100 m的光纤收发器作为系统的主干设备,巡检机器人和远程监控系统终端之间采用以太网进行通讯。为了保证选煤厂巡检机器人能够适应煤矿井下复杂的地质条件,需要保证无线基站能够满足选煤厂的实际工况,也就是需要进行防爆设计。无线基站之间是通过光纤进行连接,保证数据传输的可靠性和稳定性。图4所示为无线通讯系统原理图。
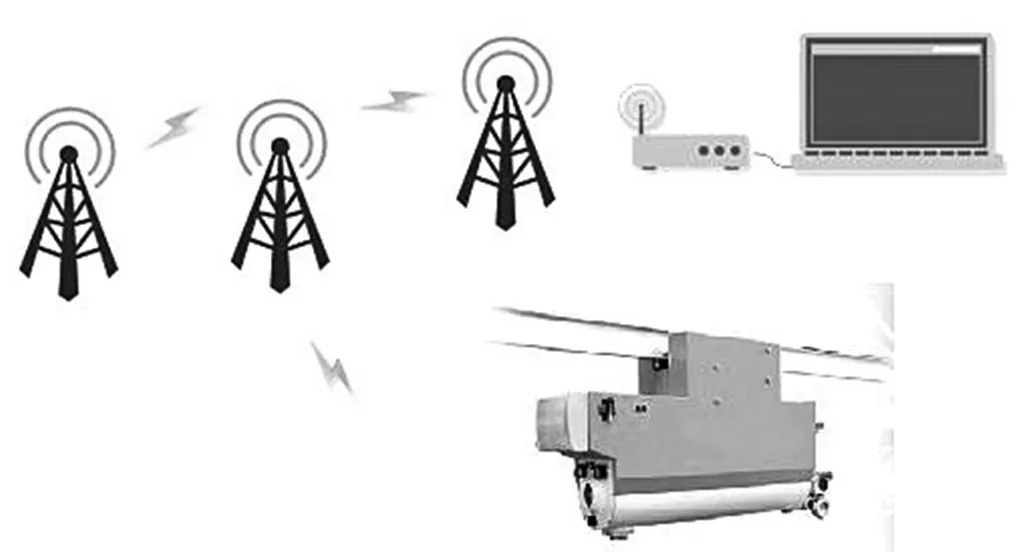
图4 无线基站通讯系统原理图
表1所列为无线基站参数信息表。
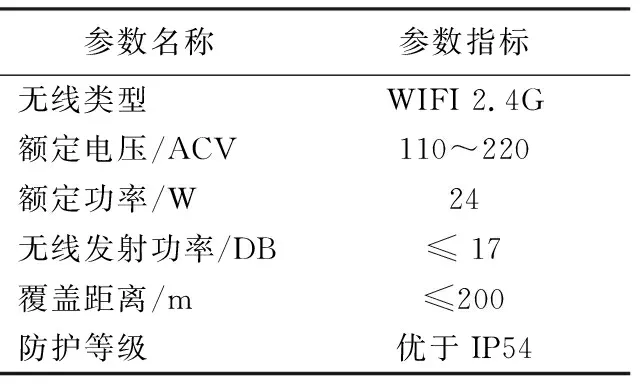
表1 无线基站参数信息
4 上位机监控系统设计和应用现场
利用巡检机器人本体搭载的多种传感器和视频成像装置实现对选煤厂设备和人员的巡检,同时包括对设备表面温度、空气中有毒有害气体的浓度等参数的检测,通过无线通讯系统将采集到的数据上传到集中监控室内,并利用上位机监控系统显示和报警。利用Microsoft Visual软件编写了监控系统后台程序和故障识别分析算法,并利用Labview 2018设计了人机操作界面,图5所示为选煤厂智能巡检机器人上位机监控系统界面,其中包括前置摄像机和旋转摄像机两个画面,从中可以查看现场运行状况和设备故障等。

图5 上位机监控系统界面
利用上位机监控系统可以将选煤厂运行工况清晰还原,同时代替传统的人工完成选煤厂设备的巡检任务。将设计的这套智能巡检机器人在某选煤厂应用,现场应用表明:采用本套智能巡检系统可以实现全天24 h不间断巡检,1台设备至少可以代替传统的5~6人完成选煤厂的巡检任务,大大降低了企业的巡检投入成本,有效避免选煤厂安全事故的发生。图6所示为现场应用异物识别图。

图6 巡检机器人异物识别应用现场图
5 结 语
针对目前国内选煤厂采用人工巡检存在的工人劳动强度大、工作效率低、巡检容易出现纰漏,造成选煤厂安全事故等问题,设计了一种选煤厂智能巡检机器人,设计了轨道式行走机构和巡检机器人本体模块,可以实现选煤厂车间内的自由移动和信号的采集,并开发了上位机监控系统界面,将选煤厂采集到的信号通过无线通讯系统传输到地面监控站,可以实现远距离监控,相比于传统的人工巡检,可实现全天24 h不间断巡检,通过红外热成像探查设备表面的温度和工人的温度,对异常温度进行报警,从而达到巡检少盲区的效果,极大降低企业的巡检成本,避免企业安全事故发生。
