基于SolidWorks的电梯检验运载机器人承重板有限元分析
2022-03-14徐黄镇
伍 磊,腾 凯,徐黄镇
(湖州市特种设备检测研究院,浙江 湖州 313000)
0 引 言
随着城市化进程的不断推进,大量高楼建筑拔地而起,电梯作为人们穿梭于楼宇之间的交通工具,近期电梯冲顶或蹲底事故频发,其安全性越来越受到大家的关注,造成大家强烈的恐惧心理,不利于电梯行业的快速稳定发展。为了保障了电梯安全稳定的运行,对电梯进行承载性能检验检测是非常必要的。但目前电梯检验面临任务重、危险性高、人工效率低等问题。
长期以来人们一直致力于如何将更多的物品更安全、快速地运送到目的地的研究,并创造了种类繁多的运载机器人。运载机器人的移动方式有轮式、履带式、多足式、轮履复合式等[1]。由于此次实验路面情况复杂,受载强度大,因此在文中的砝码运载机器人的行走机构选用具有负荷行走能力大、抗干扰能力强等优点的履带式行走机构。
SolidWorks是具有友好的用户界面和较高的市场占有率、广泛应用于各大机械非标设计公司和高校的基于Windows开发的软件。Simulation是SolidWorks开发的一款有限元分析工具软件,它的功能非常强大,提供了多种计算与分析工具,具有应力计算与分析、应变计算与分析、产品设计及优化、线性与非线性分析等功能,从而能对比较复杂的零配件计算、测试与分析[2]。作为一款嵌入式分析软件,它还可以与SolidWorks无缝集成,非常方便。在产品概念设计阶段,运用Simulation对产品结构分析,可迅速获得相应的计算分析结果,极大地降低了时间成本,提高产品的生产速度,从而使企业获取更大的利润。
1 模型建立
1.1 运载机器人模型建立
运载机器人其主要结构由驱动机构和承重机构两部分组成:驱动机构基于DSP控制技术,采用线控与遥控相结合的控制方式[3],由锂电池供电,通过两个直流无刷电机动作驱动行走机构移动;承重机构上部留有凸起的固定凸块为砝码块的平稳堆放提供固定支撑,同时保障运载机器人整机加砝码块的质量达到电梯规定承重测验要求,图1为运载机器人三维模型图。
由于实际电梯的通道和电梯门的限制,最窄处为800 mm,要保障正常地电梯进出,所以运载机器人整体结构尺寸设计不宜过大,避免和电梯门框发生碰撞、干涉。因此设计该运载机器人的长为1 200 mm,宽为700 mm,高为500 mm。
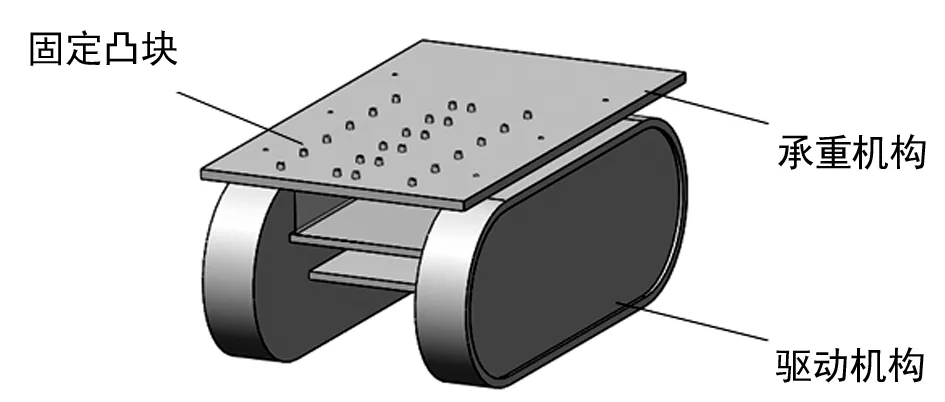
图1 运载机器人三维模型图
1.2 运载砝码结构设计
运载机器人自重已达650 kg,根据电梯曳引能力检测时的最大测试载荷确定运载机器人的总质量为1.25 t。为满足待测电梯载荷达到最大极限承重,需要设计运载砝码组合配重达600 kg。
考虑便携式拆装、重复使用和便于搬运等因素,根据电梯曳引能力检测时各个测试载荷的大小,确定运载码垛机器人载荷加载的最佳配置方案,通过设计,为减少砝码体积,提高了砝码材料的密度,选用铅作为砝码的材料;并通过三维设计软件,设计了砝码的形状和尺寸,如图2。确保单个砝码的质量为25 kg,共24块,其两列两排堆放组成砝码堆,如图3。

图2 砝码尺寸图
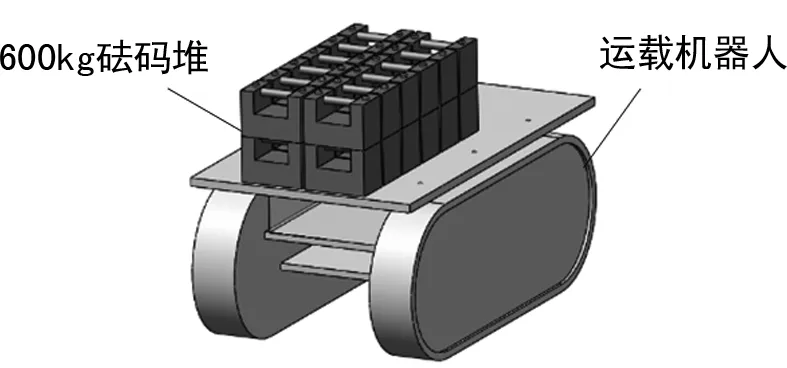
图3 砝码堆整体运载图
在运载机器人码垛过程中,为了保障机器人运行的安全和平稳,避免砝码块的滚落,对砝码进行机械结构的配合设计,每块砝码上部左右两边,留有两处圆柱型凸块并倒圆角;下部相对应两处留有配合凹槽,砝码细节结构如图4、5。借助传统式凹凸槽机械配合,保证了砝码堆的稳定搬运。
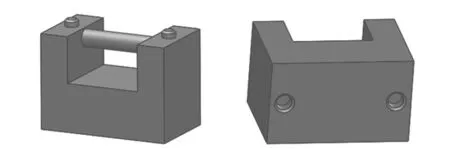
图4 砝码顶部 图5 砝码底部
2 有限元分析
当该运载机器人进行定量砝码搬运工作时,其承载砝码堆的承重板所受应力最大,也最为重要,其材料的选型、尺寸的大小与所受应力的关系密不可分,应力强度的分析是保障整个运载过程的安全可靠的关键。因此对承重板进行有限元计算必不可少,便于优化后续的加工制造。
2.1 建立数学模型
设计的几何模型被适当的有限单元划分是重要的一环,其中一些极小的孔、倒圆、倒角等特征,几乎不会影响结构分析,对于这些特征可以采取理想化、消除细节或删除等方法进一步简化几何模型[4]。设计承重板的整体结构尺寸为1 200 mm×430 mm×25 mm,在其下方有前后两处由立板固定,借此作为承重板的固定约束,配置材料属性为碳素结构钢Q235A,其弹性模量为212 GPa,泊松比为0.288,屈服强度为235 MPa,质量密度为7 860 kg/m3,作用载荷为6000 N均布在承重板上方,如图6所示。
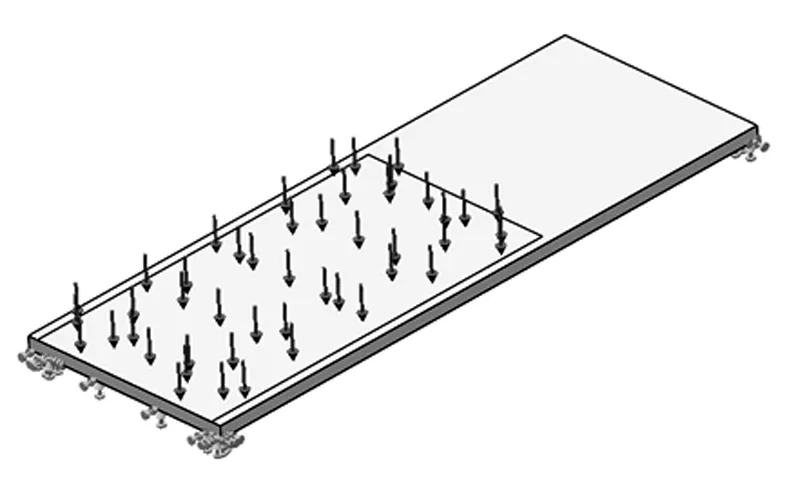
图6 承重板固定约束和作用载荷图
2.2 有限元模型求解
在三维数字模型的基础上,借助SolidWorks Simulation模块的静应力分析模组,求解得到应力计算结果如图7、8所示。
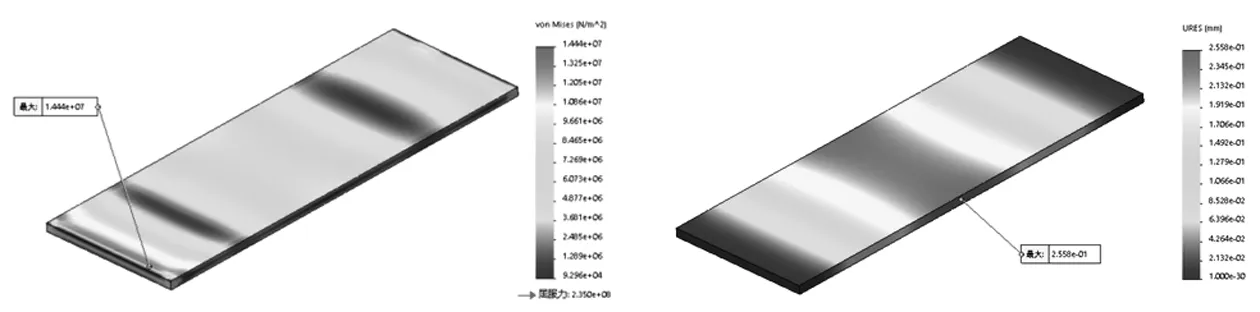
图7 应力云图 图8 位移云图
由上述有限元计算结果可得,承重板最大应力为14.44 MPa远小于钢材的屈服强度235 MPa,最大位移为0.256 mm,故承重板应力满足材料应力要求。
2.3 固有频率求解
为防止运载机器人驱动系统和承重机构产生共振造成安全隐患,需计算承重板固有频率,借助SolidWorks Simulation模块的频率分析模组,获得前五阶固有频率结果如表1所列。
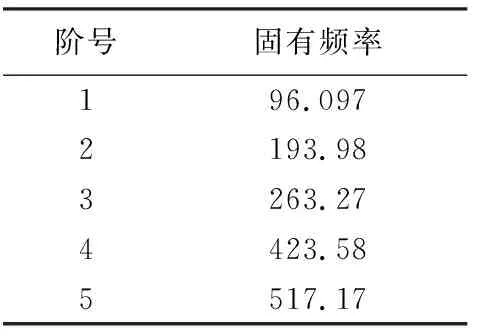
表1 固有频率 /Hz
由上述有限元计算结果可得,其前五阶固有频率分别为96.097 Hz、193.98 Hz、263.27 Hz、423.58 Hz和517.17 Hz,在运载机器人作业时,应该避免这些振动频率,以防共振频率的产生,造成作业事故和人员伤害。
3 结 语
为了解决目前电梯检验任务重、安全性低、人工效率低等问题,文中设计了电梯检验运载机器人,巧妙的设计了带有凹凸结构配合的砝码堆组合。最后借助SolidWorks Simulation模块对运载机器人的砝码承重板进行有限元分析,获得应力云图和前五阶固有频率,分析可得其最大应力满足材料应力要求,在运载作业时,应该避免这些固有频率,以防共振危害的产生。
