蔬菜嫁接机秧苗夹持机构的设计与应用研究
2022-03-13魏海燕
魏海燕
(博兴县综合行政执法大队,山东博兴 256500)
0 引言
嫁接是植物的人工繁殖方法之一。为了使物种更符合人类生存发展的要求,通常会把一株植物的枝、芽和另一株植物的茎、根接合在一起形成兼具两种植物特性的新品种,这个过程叫做嫁接,嫁接的目的是保留两种植物各自的优势,使之特性更符合人类需求。嫁接的方式分为枝接和芽接。我国的蔬菜种植面积和产量在世界上都占有较高比重,蔬菜种植是一项保障民生的重要产业,研发与发展高效、高产量种植技术十分必要,机械化种植和植物的量产都更适合现阶段农业发展需要。
蔬菜作为关系民生的传统农作物,在传统种植条件下容易受到土壤条件、种植密度、降水量等因素的影响,受病虫害影响较大,采用嫁接技术可以避免蔬菜作物自身的局限性,同时提高蔬菜作物的抗虫性,从而提高蔬菜作物产量,因此对高效嫁接技术的开发是提高农作物生产率的重要条件。嫁接机是自动嫁接装置,大大提高了传统人工嫁接的效率,现阶段我国蔬菜嫁接采取以工厂化穴盘育苗为主体的作业方式,这种育苗方式是在穴盘中进行,对砧穗木秧苗进行夹持定位并切削,因此,蔬菜嫁接机夹持定位效果与嫁接成功率是密切相关的。本文通过对六株同步自动嫁接设备中秧苗夹持机构的设计与应用研究,旨在对提高夹持成功率、减低秧苗损伤进行进一步优化改进,以提高工业化接育苗的效率。
1 夹持机构与工作原理
1.1 夹持机构
首先选取合适的穴盘进行育苗实验,穴盘内育种可通过手工种植或机械种植,机械化播种效率高且精确度好,人工播种虽然效率较低但是可以手工对种子、秧苗进行合理分配,但两者均不能保证秧苗按播种时的条件生长,即秧苗生长到可嫁接阶段时存在秧苗参差不齐的情况,加之秧苗间根须也存在交错,不利于夹持工作的进行。因此,针对穴盘育苗进行合理化播种实验来克服苗株之间的位置误差是工作化育苗的第一步。本实验拟采用一行六苗对秧苗夹持机构进行研究,其结构如图1所示。
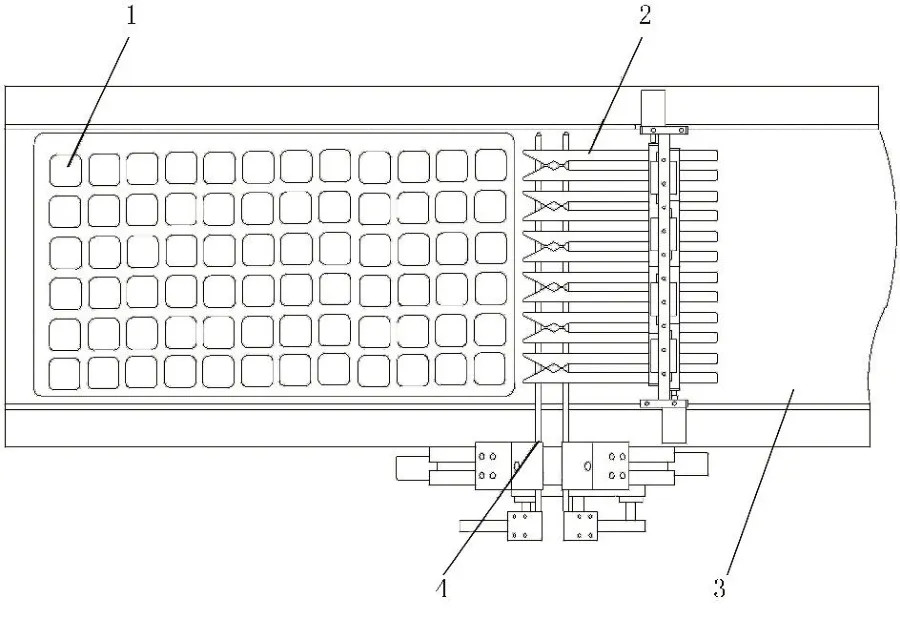
图1 嫁接秧苗夹持机构示意图
其中,输送方向为纵,水平为横,纵向共培育六株秧苗。把秧苗不断沿着水平方向进行输送,逐渐到达2号秧苗横向夹持定位装置的位置,在该区域秧苗实现夹持定位和切削、嫁接作业。3号位置是本装置的输送带,4号位置是整行秧苗纵向夹紧装置。夹持机构的工作分两部分进行,首先是整行秧苗纵向夹紧,其次是单株秧苗横向夹持。第一步进行纵向夹紧,将一纵列的六株秧苗与机器分开做沿纵向的夹紧定位;第二步做单株秧苗的横向夹持,主要针对纵向夹紧定位的秧苗,横向夹持有六对夹持爪,用夹持爪可分别实现单株的横向夹紧。在完成两组夹持动作后可进行切削、嫁接作业。
1.2 工作原理
蔬菜嫁接机在采取机械化作业时需要保证砧木和穗木夹苗机械手在喂苗位置张开,当砧木和穗木分别喂入苗后,机械手处于闭合状态,闭合后的机械手在动盘带动下转动90°至切削位置,此时由切削装置分别对砧木和穗木进行切削,秧苗继续在动盘带动下转动,当继续转动90°时秧苗达到嫁接位置时,可以实现砧木苗和穗木苗的贴合,即完成嫁接过程,嫁接完成后机械手张开实现秧苗回盘。在嫁接秧苗夹持机构作业中,需要注意保持机械手在合理位置张开和闭合,避免相邻秧苗之间产生影响。同时,为保证切削过程的准确度,一定要合理计算秧苗回盘的距离和时间,避免切削位置不理想造成的嫁接失败。
2 关键部分设计
2.1 整行秧苗纵向夹紧装置结构方案设计
整行秧苗纵向夹紧装置具体构造如图2所示。纵向夹紧装置作业的主要流程是先由整行秧苗沿着纵向进去夹持区域,两夹紧杆拉出,横移气缸给予夹紧杆作用力使之实现夹持和拉出的动作,时间测算可经由光电传感器对秧苗进行探测并于合适时间驱动两夹紧杆夹紧秧苗,完成整行秧苗的纵向夹紧。

图2 纵向夹紧装置结构图
这个过程的注意事项是要将夹紧杆靠近秧苗底部,可以避免相邻秧苗之间的相互作用。当完成纵向夹紧工作时秧苗处于底部,为将秧苗送至适合单株秧苗横向夹紧的定位区域,需由两夹紧气缸驱动滑轨将秧苗向斜上方运送,至此纵向定位步骤全部完成。
2.2 整行秧苗纵向夹紧装置结构参数的确定
嫁接秧苗夹持机构共计72孔位(包含6纵列12横行),在秧苗夹紧作业中最重要的参数是两夹紧杆最大间隙和最小间隙。已知实验所用穴盘的行间距和穴宽分别是42和40(单位mm),最小间隙则由夹紧杆夹紧状态的空隙来确定,因此夹紧杆的最大间隙和最小间隙分别为34 mm和2 mm。经过反复实验测算,在夹紧间距不超过4 mm时,秧苗不容易因夹持造成损伤且可以合理规避秧苗之间的相互影响。
2.3 单株秧苗横向夹持定位装置结构方案设计
单株秧苗横向夹持相比整行秧苗的纵向夹持需要更精准的实验测算。整行秧苗纵向和单株秧苗横向夹紧都需要提前确定规格,因此夹持爪、穴盘、秧苗的规格都有具体尺寸要求,精确到0.1 mm。同样要合理计算单株秧苗横向夹持的位置并对其进行精准定位,这样才能保证夹持不易损伤秧苗。
单株秧苗横向夹持定位装置具体构造如图3所示。其中夹持爪由左右两夹持爪单体组成,左夹持爪单体在气缸驱动下沿滑动轨道同步滑动,右夹持爪单体则被固定在另一移动板,在右夹持气缸驱动沿滑动轨道同步滑动。当气缸伸出时夹持爪夹紧,反之松开,经过两次纵横定位实现对单株秧苗的夹持定位。

图3 横向夹持定位装置结构图
2.4 单株秧苗横向夹持定位装置参数的确定
横向装置参数将根据夹持爪的尺寸、穴盘规格、秧苗尺寸综合确定。已知每相邻夹持爪之间,夹持中心的间距为42 mm,相邻夹持爪之间间距为12 mm,经过反复测试,常见秧苗直径为2.5~4 mm,选取常见秧苗进行反复测试,表明在夹持孔径为2.2~2.7 mm的时候,秧苗不易遭受损伤。
3 试验应用与分析
3.1 夹持取苗试验
为确定本次秧苗嫁接实验中夹持机构设计的工作性能参数在实际生产中的应用情况,可在砧木和穗木中分别进行夹持取苗和嫁接作业性能试验。实验秧苗直径分别为2 mm、3 mm、4 mm,秧苗嫁接夹持机构为实验设计72空位嫁接夹持机,装置结构内部参数均按照实验测得最佳数据进行,所得实验数据如表1所示。

表1 夹持取苗试验夹苗成功率统计表
3.2 结果分析
通过对实验设计中72孔位嫁接秧苗夹持机构的夹持取苗成功率进行测试,测试选取2 mm、3 mm、4 mm的秧苗,将不同直径的秧苗分别进行嫁接夹持取苗实验,实验测得夹苗成功率为93%以上,伤苗率控制在3%左右,夹持取苗实验测试结果满意。
4 结语
对夹持机构的合理设计与应用是实现机械化蔬菜嫁接的重要步骤,通过对蔬菜嫁接机秧苗夹持相关机构的研究,设计出一种72孔位的嫁接秧苗夹持机构。文章首先对夹持机构的结构进行了详细说明,接着对夹持机构的具体参数进行了合理的测算确定,最后通过具体的夹持取苗试验对夹持机构进行的夹苗成功率进行了验证,实验结果较为满意,希望为未来蔬菜嫁接工业化生产作业提供一定的理论支持。