工业自动化对象仿真在流程自动化控制系统中的应用*
2022-03-11梁金夏潘天赐
梁金夏,潘天赐
(1.百色职业学院,广西 百色 533000;2.桂林理工大学博文管理学院,广西 桂林 541006)
1 引言
现代工业生产中最具广泛应用的控制系统为工业自动化控制系统[1],该系统可有效提升工业生产效率与质量,也使得越来越多的现代化信息技术被广泛应用于自动化控制系统的实际运行过程中,将计算机技术[2]的更多功能赋予自动化控制系统。因此只有在控制系统中合理应用计算机技术,才能提升系统运行效率、促进工业生产发展。随着流程自动化[3]水平的不断提升,生产系统日益复杂,生产节奏与日加快,因此,管理者需谨慎思考生产改进过程中的每一个决策,稍有差池就会付出高昂的代价。控制系统具有一定的复杂性、柔性以及快节奏性,若想精准预测出各决策对系统产生的影响,就要依靠计算机仿真技术,使其演变成流程自动化控制系统管理者的一种有效手段,辅助生产系统规划各人员工作。
国内外针对该领域的流程自动化控制已经有了一些研究成果。国外有研究提出采用计算机运算系统的数学模型,分析、研究、设计被仿真的工业自动化系统即为工业自动化对象仿真。国内学者在该研究的基础上,将该仿真技术应用于流程自动化控制系统中,既能节省物理试验模拟系统的建立资金投入、降低构建费用成本,还能通过计算机技术实现准确的运算与验证分析,强化系统策略实践性,根据仿真结果来判定控制系统性能,制定合理方案。
为此,本文将工业自动化对象仿真技术融入流程自动化控制系统,并探讨其应用性。将系统的传递函数转换为输入到输出的递推公式,简化运算步骤,节省计算时间,提升仿真速度,实现工业自动化对象仿真由一次矩阵变换完成;通过双线性变换实现离散化后,提升系统稳定性。
2 工业自动化对象仿真在流程自动化控制系统中的应用
2.1 工业自动化对象仿真类别
按照仿真状态可以将工业自动化对象仿真划分成两种:稳态仿真与动态仿真。
2.1.1 静态仿真
时间参数不包含于前者的流程对象中,此类仿真中的流程因素不因时间而发生变化,属于一种动态过程至平稳状态的简化处理[4]。将稳态仿真应用于流程控制系统中可以解决下列三种问题:
(1)模拟分析流程系统:通过模拟计算给定的流程系统,获取所需的系统状态变量,分析、验证控制系统流程;
(2)构建控制系统:根据提出的系统变量设计规定与要求,对决策变量进行调整,使其符合构建要求;
(3)优化流程系统参数:联立计算流程系统模型与最优化模型,获取一组优化变量使工况的目标函数为最佳,该优化形式主要通过调整工艺操作条件完成,结合优化软件与静态仿真软件,优化流程操作变量。
2.1.2 动态仿真
动态仿真[5]主要是针对实际流程中的各类波动、干扰与条件变化,利用微分方程组构成的动态模型,模拟实际生产流程。若将动态仿真应用于流程控制系统中,则能够解决多个实际生产问题,具体描述如下:
(1)设计流程系统工艺:通过选择生产方案、明确生产参数等工艺设计,令流程控制系统以最佳状态维持运行;
(2)设计流程系统控制器:控制器生成的控制量被动态仿真软件接收后,即可获取被控对象动态模型的实时动态输出,基于模型输入与输出之间的相关性,构建合理的控制器;
(3)分析、预测流程系统安全性:动态建模当前生产流程后,动态仿真、分析并预测控制系统的安全性能;
(4)培训员工操作技能:训练操作人员维持正常运行的操作技巧与面对紧急事故的处理能力;训练仪表工程师调整、组态仪表系统能力以及分析、处理仪表系统故障能力;训练工艺工程师分析工艺流程变量与优化选取工艺参数能力。
2.2 工业自动化对象仿真算法
由于计算机只能储存、运算离散值,因此,在仿真流程自动化控制系统前要先实施离散化[6]。选取Z变换[7]处理下列梯形积分公式:

得到下列Z变换表达式:

整理上列两式后得出下列表达式:

上式里,采样周期是T的序列分别是x(t)与x'(t),对应序列的Z变换分别为X(z)与X'(z)。
假设下列公式为流程自动化控制系统的闭环传递函数表达式:

则由上式可推导得出闭环传递函数的微分方程,如下所示:


其中,k为任意常数,取值范围是k=0,1,2,…。
Z变换处理上列等式两端,改写成下列表达式:

根据式(3)的代换形式,整理上列表达式,则有:

上式里,Z变换矩阵Zn、系数矩阵a与b以及序列矩阵X、DT的表达式分别如下所示:

其中,序列矩阵X中元素xi0、xj0以及xij的取值条件式如下所示:

利用式(8)与采样周期T,就能够求解离散传递函数。为简化运算步骤,节省计算时间,提升仿真速度,将系统的传递函数转换为输入到输出的递推公式,使工业自动化对象仿真通过一次矩阵变换即可实现。因此,根据公式(8)对应差分方程表达式,完成的单位阶跃输入:

从而推导得出下列表达式:

通过双线性变换实现G(s)离散化后,使系统稳定性得以提升,以t字长的稳定系统为前提,设计上式的递推算法稳态误差计算公式,如下所示:

根据上式可知,当系统稳定时,有|z|=1且D(z)≠0,此时稳态误差为有界;若字长明确,则稳态误差由系统稳定程度决定,运算误差随着闭环极点与圆心距离的变小而降低。
采用综合、明确、单一的指标,评估系统性能优劣,在众多对象仿真系统中选取较好性能系统,故选用ITAE(integrated time and absolute error,时间乘以误差绝对值积分)指标[8]完成评估,并利用下列计算公式求解指标值:

上式里,误差函数为e(t)。
2.3 仿真在流程自动化控制系统中的应用
2.3.1 泵阀与管路系统仿真
将容器去除后只剩下变频泵阀系统,其主要组成部分分别为变频器驱动水泵、回水阀门、调节阀与电磁阀并联管路以及出口手阀。图1所示为泵阀与管路系统工艺。
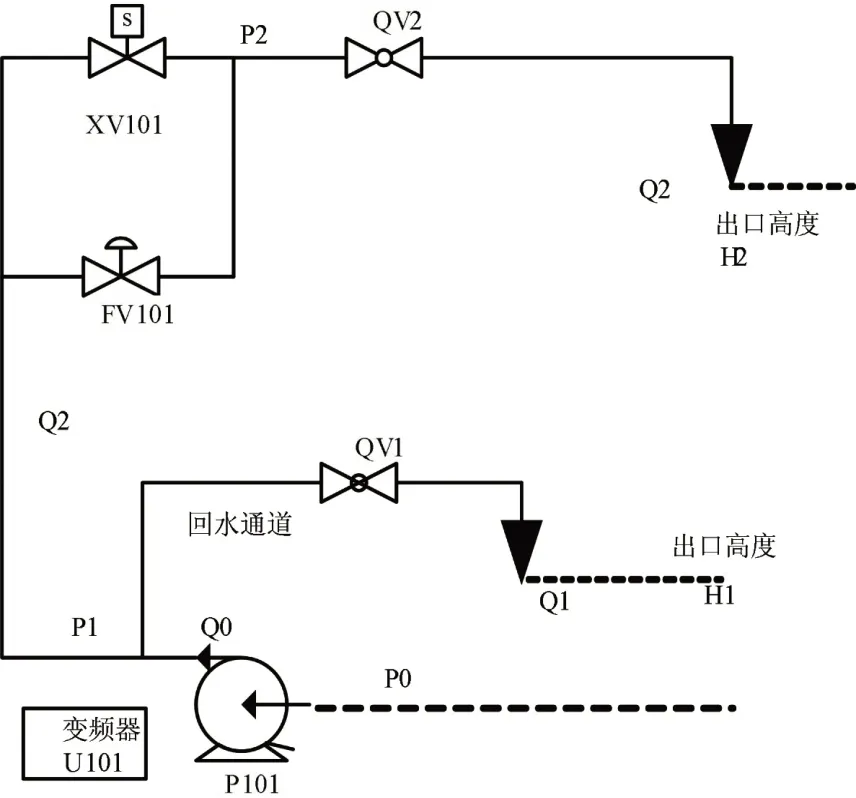
图1 泵阀与管路系统工艺示意图
根据上图1中所示,设定各阀门均满足下列等式:

上式里,体积流量为Q,与开度存在关联性的流量系数为CV,水密度为G,取值通常为1。
由于水泵模型的实际流量曲线相对复杂,故将其简化为曲线图2。
变频器的启动频率是15Hz,最大频率为50Hz。由上图2可以看出,当变频泵特性处于良好状态时,与水泵扬程之间表现为线性关系;流量随着出口压力的增加而减小,扬程则随着频率平方的增加而变大。

图2 简化后的水泵模型流量曲线示意图
根据采样时间变化,求解阀门FV101 与变频器的实际值,P1作为计算过程中的关键数值,可通过折半查找方法获取,则P1的极值分别是Pmax与0。
2.3.2 液位容器仿真
液位容器存在水平互联时复杂度将有所增加。用Q2表示进口流量,Q3 表示出口,S 指代水箱截面积,H 代表液位高度,构建图3所示的液位容器仿真模型。
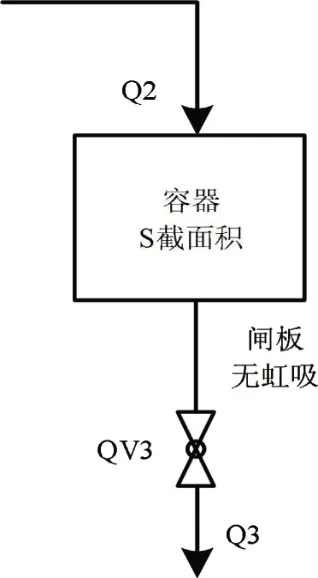
图3 液位容器仿真模型示意图
阀门与压差开方为正相关,且出口流量满足下列表达式:

经过离散化,得到下列表达式:

其中,t'为标准时间单位,若流量为立方每小时,则将其转换为小时。
2.3.3 控制器仿真
针对两个给定PID,通过对象仿真令所有单回路PID、串级控制、前馈反馈控制以及位式控制得以实现。其中,PID控制的计算公式如下所示:

由于增量算法存在抗饱和属性,因此,可以省略额外的抗饱和操作。
3 实验分析
3.1 实验准备阶段
选取某企业近几年投入使用的三号机组流程自动化控制系统作为工业自动化对象仿真的模拟实验对象。在准备工作过程中,先完成传感器、控制器以及数据采集控制卡等硬件的安装、连接与设置,调试过数据采集卡与PC机后,安装simulink、real-time work target以及realtime workshop等系统仿真所需工具箱。
仿真模型的具体构成组件如下表1所示。

表1 模型组件统计表
不需连接实际的硬件环境,便可将控制系统组态置于操作台中,根据仿真模型的操作反馈信号,显示仿真结果,并以此作为控制系统运行结果的判定依据。
关于仿真模型的符号与功能设置,具体描述如下:
(1)故障报警为自动化控制阀门图形旁边的字母“F”,主要分成预报警与故障报警两种:前者用于提醒操作者注意调整工艺控制,后者用于提醒操作者工艺调整错误,当变量与电机、阀门存在联锁情况时,设备将终止运行;
(2)电机形状图形旁边的字母i、M、L,分别表示关于设备的联锁条件、中控室手动操作与现场设备手动。
3.2 仿真实验结果分析
为验证本文构建的工业自动化对象仿真模型具有相对理想的有效性与可行性,将控制系统组态置于操作台中,运行仿真程序,根据仿真模型得出仿真实验的结果数据,得到图4所示的流程自动化控制仿真数据。

图4 流程自动化控制仿真数据
对本文中使用的三号机组流程自动化控制系统进行实际操作,并记录实际操作后的实验数据,得到图5所示的流程自动化控制实际数据。

图5 流程自动化控制实际数据
采集流程自动化控制的仿真数据和实际数据后,采用scope模块记录实验波形,得到图6所示的流程自动化控制实验结果。

图6 流程自动化控制仿真结果
根据图中曲线走势可以看出,在50s 时,实际数据为29.2v,仿真数据为29.3v,100s 时,实际数据为29.4v,仿真数据为29.5v,150s 时,实际数据为29.6v,仿真数据为29.5v,以此类推,可见,仿真实验数据与实际数值之间具有较高的拟合度,虽然稍有偏差,但误差极小,几乎可以忽略不计,这说明本文构建的工业自动化对象仿真模型具有相对理想的有效性与可行性。
3.3 控制系统各指标对比
为验证工业自动化对象仿真的应用性,比较控制系统使用仿真策略前后的经济效益与时效性指标值,所得实验结果分别如图7所示。

图7 工业自动化对象仿真应用前后指标对比
结合图5展示的仿真策略使用前后经济效益与时效性指标值趋势,发现相比仿真模型使用前,使用后的控制系统成本投入与消耗更少,时效性的大幅度上升不仅加快了流程自动化控制效率,而且也使整体生产运行速率得以提升,同时增加了经济效益,两指标相辅相成,推动了流程自动化控制系统的进一步发展。综上所述,在该系统中融入工业自动化对象仿真技术具有重要的现实意义与实践价值。
4 结束语
本文以流程自动化控制系统为研究目标,探讨工业自动化对象仿真技术在其中的应用。尽管计算机仿真技术已经在电力、通信、生物、航空、交通运输以及经济等多个领域中得到广泛应用,但工业自动化对象仿真技术与流程自动化控制系统的融合仍处于初探阶段,该项研究既可以较大程度缩短流程规划设计周期,还能够依据仿真结果优化控制策略。通过人机界面观测未来实际生产阶段里系统设备全时空信息,还有生产现场的设备输送、存储情况以及多个设备的运行状态,预测有可能发生的潜在阻塞与障碍。通过改变输入参数、仿真系统受到的波动冲击与生产情况,使基于理想化状态的系统构建中未曾考虑到的不同因素得以避免,为系统阻塞提供更直观、更形象的解决策略。在创建控制系统前,多方面全方位地掌握流程自动化控制系统建成后的实际生产信息与流程。
