基于激光雷达测风仪的风电机组偏航优化控制方法*
2022-03-11冯红岩朱海娜
冯红岩,朱海娜
(天津中德应用技术大学能源工程学院,天津 300350)
1 引言
激光雷达测风仪(lidar anemometer,下文简称Lidar)不仅在风能资源测量中显现出了巨大优势,激光雷达测风技术的不断发展也为风电机组的智能化提供了更广阔的空间。将Lidar应用于风电机组,进行风况的多参数准确测量和机组优化控制的研究,主要集中于两个方向:一是利用激光雷达预测风速的特点进行风电机组的前馈控制技术研究,文献[1]借助Lidar对机组前方的风速特点进行了详细研究,可以对各种基于Lidar 的控制技术应用提供支持,韩兵等人将模型预测控制技术应用到基于激光雷达的风电机组控制策略中,仿真结果表明可以增加机组运行的稳定性,降低机组的疲劳载荷[2]。Haizmann等人给出了基于Lidar的前馈控制技术的具体实现方式[3],Bossanyi 等人通过对多款Lidar 在机舱上的实际应用进行研究,发现将其应用于变桨前馈控制可以显著降低机组的疲劳载荷[4];另一个方向是将Lidar 应用于偏航控制的优化,Bossanyi 认为风电机组的偏航系统是一个非常缓慢的跟随系统,Lidar可以提前几秒预测风向的特点对偏航控制而言,不能带来任何优势,但是Lidar 可以避免传统风向标由于叶轮的扰动对风向检测产生的偏差,因此,可以用Lidar 对传统风向标测到的偏航误差进行校正[5]。文献[6-7]对Lidar 在偏航控制优化中的应用进行了基于实测数据的研究,但是不论是对Lidar的风向检测设置方式,偏航误差的校正方式,还是校正方案的适用条件等方面研究的都不够深入。本文在对Lidar 的偏航误差检测原理进行分析的基础上,对其应用于机组偏航控制或校正的适应性进行了说明;在研究机组前方气流分布特点的基础上,明确了Lidar 的风向检测设置方式;从检测数据的处理,偏航误差校正函数的拟合,偏航优化控制策略的实施等方面设计了一套完整的偏航误差校正方案。
2 项目描述
测试风场位于河南省唐河县境内,主导风向为NE和SSW。选取3 号机组为测试机组,如图1所示,在主导风向上地势相对平坦,且没有上游风机的尾流影响。机组额定功率2500kW,叶轮直径为121m,额定风速10m/s(安装地空气密度下)。机组上安装了一台四光束激光雷达测风仪,可以同时采集前方50-200米十个不同距离的风况信息。

图1 被测机组的位置及有效风向扇区
因为在风电机组实际运行过程中,机组的效率、载荷与风向无关,影响机组性能的是偏航对风的误差。机舱上安装的测风仪,直接检测到的是机组的偏航误差,即测风仪参考零位线与风向的夹角。在测风仪安装中,其参考零位线与机舱中轴线是否严格平行,就成为影响偏航误差的至关重要的因素[8]。所以在开始测试之前,对本地风向标的安装精度进行了校准。
3 Lidar的检测原理及设置
Lidar 的风速、风向检测原理是分析其适用范围、检测误差来源的基础。
3.1 Lidar的检测原理
Lidar根据大气中散射粒子的多普勒频移效应,可以直接测得沿光束方向大气散射粒子的移动速度。为简单明了,以图2所示两目激光雷达测风仪为例,说明风速、风向计算原理。传感器可以直接测得左侧激光束方向气流速度Vlos1和右侧激光束方向气流速度Vlos2。假设当前风速、风向如矢量V所示,V可以分解为与仪器轴线垂直的矢量U和与仪器轴线平行的矢量W,假设激光束方向与水平面平行,忽略风速垂直方向分量,则有:
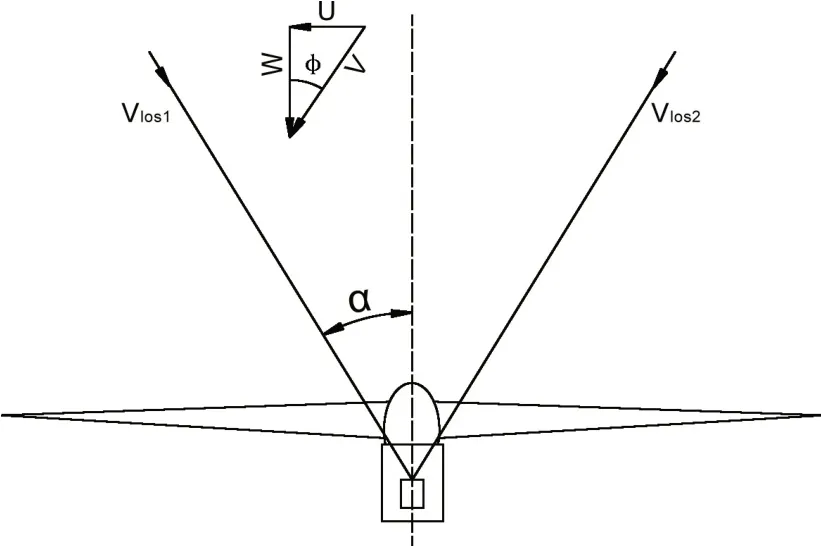
图2 激光测风仪的风速风向计算原理图

其中α是激光束与机组机舱中轴线的夹角,根据以上两式可以推导出:

则风速为:

设风向与仪器中轴线的夹角为Φ,则Φ可由下式求得:

根据公式(5)、(6)便可以测出机舱前方设定距离的自由流的风速,及风向与仪器中轴线的夹角。使激光测风仪的中轴线与机舱的中轴线重合,则Φ角即为机组的偏航误差。四目或多点圆周扫描式的激光雷达对风速和风向的计算原理与上述两目式基本相同,但可以扩展到对横向和纵向风切变的检测,进而得到整个叶轮前面的平均风速,而不仅是叶轮正前方轮毂高度的风速。所以检测数据更完备,成本也更高。
由此可见,Lidar是基于对左右两侧光束方向检测位置处气流流速的大小,进行偏航误差计算的。但是,叶轮没对正风向、两个检测位置的实际风速不同这两个因素都会导致Vlos1和Vlos2的大小有差异。在后期的数据处理过程中,会一起影响机组偏航误差的计算。所以,Lidar不能有效区分机组的实际偏航误差和风速的水平切变。在上游地表粗糙度比较大,或者上游机组尾流影响严重的扇区,用Lidar 的偏航误差检测结果进行偏航控制,可能会引入不确定性误差[9]。本项目参考了风电机组功率特性测试标准IEC61400-12-1:2017[10]的规定,只有符合安装测风塔条件的扇区,才可以作为进行偏航校正有效数据采集的扇区。所以用Lidar进行偏航误差校正,首先要确定有效的风向扇区,本项目被测机组的有效风向扇区如图1标出的扇区所示。
3.2 Lidar的检测设置
IEC61400-12-1:2017规定测风塔距被测风机的距离要在2D-4D 之间,D 为叶轮直径。实测数据也表明在距风机距离小于2D范围内,风速、风向开始缓慢发生畸变。
随机选取不同风速下实测的叶轮前方不同距离处的偏航误差曲线如图3所示。从图中可以看出,同一时刻检测到的不同距离处的偏航误差规律的向一个方向变化,但是变化的方向不确定。这也直接反映出气流在接近叶轮时风向将发生畸变。测试结果也表明,风速在叶轮前方首先经历一个受压加速的过程,然后逐步降低,转折点随风速不同而略有变化。而风电机组在运行中,是要对正不受自身干扰的风的方向,才能保证机组的风能利用效率。要获得不被叶轮干扰的自由流的风速和风向,测试点要远离叶轮,符合IEC61400-12-1 的规定。但是对于以优化机组的控制方式为目的检测,检测点越靠近风机,检测结果所需要的延时时间越小,有效性也越高。通过对大量检测数据进行分析发现,距离风机大于1.5D后,偏航误差值随距离变化趋缓,可以反应自然风向。
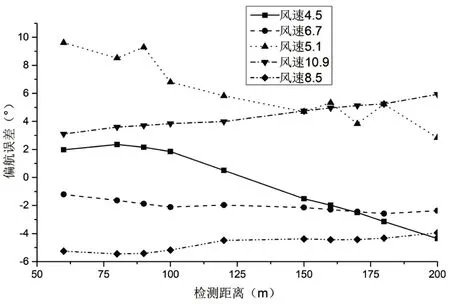
图3 不同风速下叶轮前方风向随距离变化趋势
另外,风电机组吸收的风能大部分集中在叶片3R/4以上的范围,在这个范围内的风速和风向是对机组的出力影响最大的[11]。在设置激光雷达的测试距离和锥角时要尽量使检测点落在这个范围。本测试项目所用激光雷达的水平锥角为15°,垂直锥角为12.5°。所以,靠近叶轮的测试点的风向测量精度会有所降低。
结合以上两点分析,本项目最终确定以200米处的偏航误差作为修正机舱偏航误差的参考值。在对每个检测位置的风向都有较高精度要求的应用中,建议激光测风仪不同距离用不同的锥角值。但需要注意,锥角过大会影响风速的检测精度。
4 偏航误差分析与传递函数的拟合
4.1 数据的前处理
数据分别取自SCADA 系统记录的机组本地测风仪测得的10min 偏航误差和Lidar 数据采集系统记录的10min 偏航误差。无效测量数据会严重影响偏航误差的统计,进而影响拟合的传递函数的有效性,因此需要进行数据预处理,包括数据筛选和数据质量检查2个步骤。数据筛选:(1)剔除风电机组偏航系统在“not active”状态下的数据;(2)剔除在有效测量扇区之外的数据;(3)剔除风速低于切入风速和高于额定风速的数据;(4)剔除绝对值大于30°的数据。数据质量检查:(1)确保测试信号在正常范围内且可利用;(2)确保传感器正常运行;(3)确保数据采集系统正常运行;(4)激光测风仪测量数据有效率大于0.3。
由于风向的畸变受风速影响较大,采用风速分区拟合的方式,分3~6.5m/s,6.5-10m/s两个区段,从切入风速(3m/s)到额定风速(10m/s)分区拟合传递函数。剔除所有无效数据后,保证在拟合的风速区段内,在[-10°~10°]的偏航误差范围内,每0.5°区间至少有5 个以上有效数据[12-14],以保证最终的拟合精度。
4.2 偏航误差分析与传递函数的拟合
测试期间本地风向标的10min偏航误差测量结果平均值为0.11°,均方差为5.39°,说明机组在控制系统作用下能进行良好的风向跟踪,风向标安装的精度和机组的偏航控制策略满足要求。而Lidar 的偏航误差检测结果均值为2.13°,均方差为4.92°。这主要是因为测试期间机组以本地风向标的检测输入作为偏航控制偏差,没有追踪Lidar 测得的风向。二者平均值的偏差2.02°,即为本地测风仪受叶轮旋转的干扰而产生的测量偏差。
以机组本地风向标的偏航误差测量结果x为横坐标,以激光雷达检测出的偏航误差y为纵坐标画出低风速和高风速时的散点图,如图4和图5所示。采用最小二乘法对x,y进行一阶线性拟合,风速在3~6.5m/s 间拟合的传递函数为:

图4 低风速区间的散点图和拟合曲线

图5 高风速区间的散点图和拟合曲线

其拟合优度R2=0.4559。
风速在6.5~10m/s间拟合的传递函数为:

其拟合优度R2=0.4748。从拟合结果可以看出,传统风电标的检测误差主要来源于低风速段;而高风速段Lidar的偏航误差检测结果比本地风向标的更稳定。
5 误差校正交替控制策略的设计
通过前面分析可知Lidar 对偏航误差的检测精度是受一定条件限制的:只有机组前方没有上游风机尾流影响和地形条件符合要求的扇区才可以开启校正函数。针对此问题,设计了偏航误差校正交替控制的策略,并且不同风速段对应不同传递函数以提高精度,控制流程图见图6。

图6 偏航误差校正交替控制策略流程图
6 结果分析
应用上述偏航误差校正交替控制策略对目标机组进行了一个月的运行控制后,取SCADA数据进行分析。对测试期间的偏航误差求均值,结果为1.91°,该偏差是因为偏航误差校正控制程序修正本地风向标的偏航误差检测结果而引入的。
利用中央监控系统的实时数据中“偏航电机工作时间”统计结果,采用校正控制之前2019年5月16日-6月15日偏航电机累计工作时间为38.3个小时;采用偏航校正控制之后2019年8月1日-8月30日偏航电机累计工作时间为32.5 个小时。偏航电机的动作率由5.32%,降低为4.51%。这说明偏航系统的动作频率明显降低,这将有助于降低偏航系统的疲劳载荷,提高稳定性。
利用中央监控系统在上述校正前一个月和校正后一个月的10min数据,做出机组网侧功率的散点图,并求出每0.5m/s风速区间的功率均值,如图7所示。从散点图中可以看出:采取校正措施后,在相同风速下,网侧功率10min 均值可以达到一个更高的输出。校正后的功率曲线要优于采取校正措施措施之前。根据功率曲线进行年发电量计算,结果表明:本测试项目采取交替校正的控制策略后年发电量可以提高1.87%。

图7 校正前后功率曲线比较
7 结束语
项目基于Lidar测风数据,进行风电机组的偏航误差校正问题进行了深入的研究,主要成果和需要进一步研究的问题总结如下。
通过对Lidar的风向测量原理进行分析,得出了应用Lidar 的检测结果直接或间接进行偏航误差校正的局限性,提出只有在机组上游没有明显尾流,地表粗糙度比较小的情况下,才能得到高精度的检测结果。地形和上游风机尾流对Lidar风向检测结果的影响需要进一步研究。
通过对叶轮前方的风向变化规律进行分析,发现要检测到不受干扰的自由流的风向进行偏航误差控制,测试点距叶轮的距离应大于1.5D,径向位置在3R/4~R之间为宜。
设计了一套拟合偏航误差传递函数的方法和偏航误差校正交替控制策略。该方案只需经过短期安装Lidar,得到足够的测试数据,拟合出可信度较高的偏航误差传递函数,应用到设计出的控制策略中即可完成,无需增加硬件成本。经过实际测试表明,该方案可以降低机组偏航动作的频率,有助于提高机组的发电量,具有实际工程应用价值。
