面向瓷砖拼花的机器人末端执行器及吸附点规划算法*
2022-03-11陈洁涛陈焕乐谭炯钰蒋晓明
陈洁涛 陈焕乐 谭炯钰 蒋晓明
开发设计
面向瓷砖拼花的机器人末端执行器及吸附点规划算法*
陈洁涛1陈焕乐1谭炯钰1蒋晓明2
(1.广东工业大学机电工程学院,广东 广州 510006 2.广东省科学院智能制造研究所,广东 广州 510070)
针对当前瓷砖拼花行业依赖人工及瓷砖部件形状各异、尺寸差别明显的挑战,设计一种面向瓷砖拼花的机器人末端执行器及吸附点规划算法,提出多点吸附控制系统和基于吸附抓取稳定性最优的多吸附点位优化规划算法。经实验,验证了该算法的可行性以及对不同形状尺寸瓷砖部件的适应性。
机器人;多吸附点;可调吸附点;真空吸附;瓷砖拼花
0 引言
瓷砖拼花是通过水刀把瓷砖切割成不同的部件后,再将不同材质、形状、尺寸的瓷砖部件拼接成一块完整的拼花瓷砖过程。瓷砖部件拼接是核心工艺之一。目前,瓷砖部件拼接采取纯手工方式,存在拼接效率低、质量无法保证等问题。随着机器人技术的快速发展,利用机器人实现瓷砖的自动化拼接成为趋势[1-2]。同时,瓷砖部件的自动化拾取和放置引起广泛关注和研究。
平整规则部件的拾取和放置常采用真空吸附方式。对于大型部件,可布置多个固定吸盘。但瓷砖部件形状各异,尺寸差异较大,要求机器人末端执行器需具备良好的形状和尺寸差异适应能力,吸附点的机构及算法可自适应调整[3-4]。
为此,本文设计面向瓷砖拼花的机器人末端执行器及吸附点规划算法,通过同步带实现3个吸附点位置调整的机器人末端执行器——可调节真空吸附装置,并提出多点吸附控制系统和基于吸附抓取稳定性最优的多吸附点位置优化规划算法[5-6]。
1 可调节真空吸附装置
可调节真空吸附装置由1个步进电机、3个真空吸盘、3个滑块导杆机构、1条同步带、1个同步带轮、2个齿形惰轮、3个惰轮、上机架和下机架等组成,结构简图如图1所示,装置机构设计如图2所示。
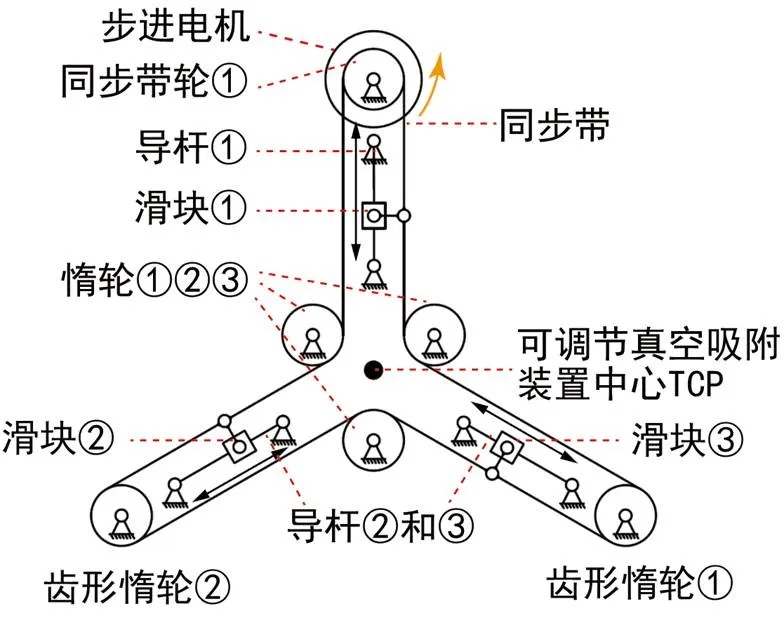
图1 可调节真空吸附装置结构简图

图2 可调节真空吸附装置机构设计
如图2所示,可调节真空吸附装置的下机架设有3个呈120°分布的支架臂,每个支架臂上设有滑块导杆机构,真空吸盘设置在装置中心TCP和滑块底部。2个齿形惰轮和3个背面张紧型的惰轮将同步带进行张紧导向,使其与3组滑块导杆机构的导向分别平行,滑块均固定在同步带上。由步进电机通过同步带轮和同步带与滑块导杆机构传动,沿着装置中心TCP方向调整吸附点。对于尺寸较小的部件,采用单个吸盘吸附;对于尺寸较大的部件,则采用多个不同组合的吸附点共同完成吸附。
2 多点吸附控制系统
多点吸附控制系统主要由工业相机、工控机PC、工业机器人、可调节真空吸附装置和可编程逻辑控制器PLC等组成,用于控制机器人,执行相应的拾取和放置操作。多点吸附控制系统框图如图3所示。

图3 多点吸附控制系统框图
工业机器人末端与可调节真空吸附装置相连。在瓷砖拼花过程中,首先,工业相机拍摄瓷砖部件照片;然后,工控机PC进行图像处理和吸附点规划,将机器人末端姿态发送给工业机器人,并将吸附点调节所需的步进电机脉冲信号和真空吸盘启停所需的I/O信号发送给可编程逻辑控制器PLC;最后,发送相应的脉冲信号驱动步进电机,调整可调节吸附点的位置。
工业机器人与工业相机分别与工控机PC通过TCP/IP以太网连接;可编程逻辑控制器PLC与工控机PC通过RS485串口连接;压力传感器、电磁阀、步进电机等与可编程逻辑控制器PLC连接。其中,压力传感器监测真空压力的大小进而判断真空吸盘吸附状态;电磁阀控制真空发生器的气流通断;步进电机调整可调节吸附点的位置。
3 多吸附点位优化规划算法
3.1 评价准则
可调节真空吸附装置和多点吸附控制系统要满足不同部件的吸附需求,还需设计与装置匹配的多吸附点优化规划算法,其中吸附稳定性至关重要[7-8]。本文以无内轮廓的平面部件为例,吸附稳定性由3个可调节吸附点形成的三角形外接圆半径来评价。若部件平面面积大多在外接圆内,可减少在吸附过程中部件重量对吸盘组的倾覆力矩,即吸盘组的多吸附点离质心越远,吸附越稳定[9-10]。吸附稳定性可描述为

式中:
——可调节吸附点形成的三角形外接圆的半径;
——可调节真空吸附装置中心TCP与部件质心之间的距离。
在不考虑可调节真空吸附装置中心TCP和部件质心偏置的情况下,可将公式(1)简化为公式(2):
由于部件形状各异,本文以部件质心为中心,绘制半径为的最小外接圆以描述部件平面空间的大小;再将吸附点离质心的距离和部件外接圆半径的比值与可行的吸附点数量进行加权,得到稳定性优化函数:

式中:
——由部件质心与尺寸决定。
3.2 算法流程
多吸附点优化规划算法流程图如图4所示。
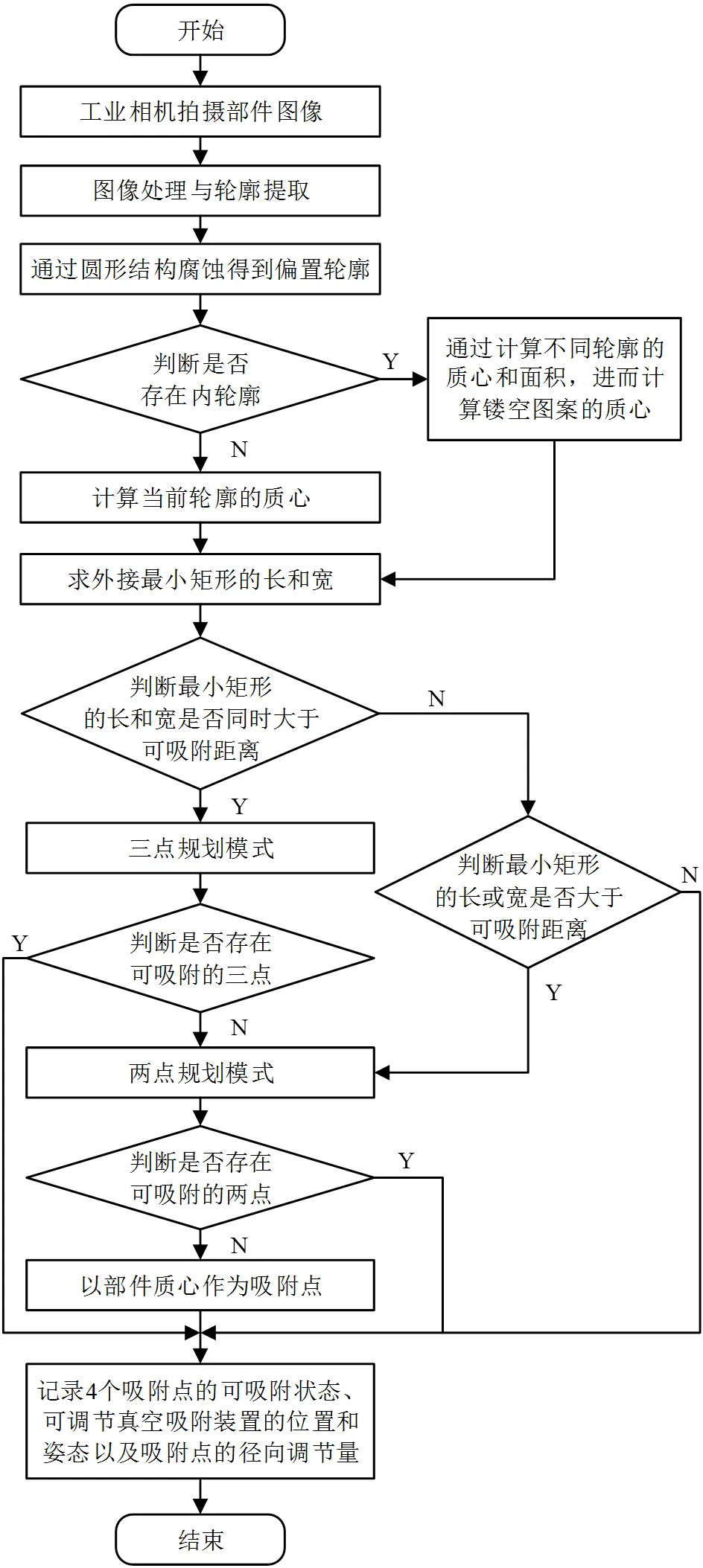
图4 多吸附点优化规划算法流程图
1)利用工业相机拍摄部件图像,并通过OpenCV算子对图像进行滤波和二值化等预处理,分割出部件图像的形状和背景;
2)在工控机PC上利用findContours()函数检测并提取部件轮廓,计算其轮廓矩,判断是否存在内轮廓,计算单一轮廓或镂空轮廓的轮廓矩和质心点;
3)以圆形结构元素对轮廓进行腐蚀,将外轮廓向内偏置(内轮廓向外偏置)一个安全距离,即略大于一个真空吸盘的半径,获得部件的可吸附区域;
4)给轮廓做外接最小矩阵,通过比较矩阵的长宽与可调节真空吸附装置的最小吸附范围的大小,确定采用三点规划模式还是两点规划模式。

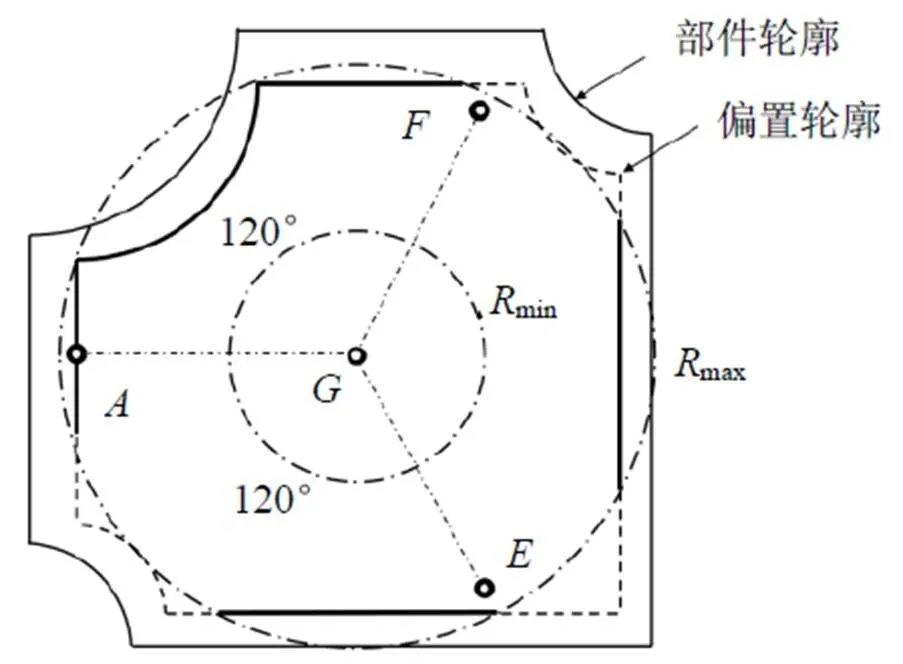
图5 三点规划模式
两点规划模式如图6所示。给偏置后的轮廓建立AABB包围盒,以轮廓中心点为中心,遍历在可吸附范围内的轮廓点,设为点;以点和点作直线,找出与包围盒相交的两点1和2;从2点往点遍历找出在可吸附范围内离点最远的点,从而找出最佳吸附点点和点。对于可吸附范围小于min的部件轮廓,可只采用点为吸附点。

图6 两点规划模式
4 实验
可调节真空吸附装置的可调节吸附点范围在距离装置中心TCP的50 ~ 140 mm,可满足大部分瓷砖部件的吸附需求。实验选取部分常见的具有代表性轮廓的瓷砖部件为实验对象,如尺寸差异大、细长或含内轮廓的瓷砖部件。
对一些常规轮廓、细长轮廓以及含有多个内部轮廓的瓷砖部件进行多吸附点优化规划的仿真测试,结果显示在吸附范围内可根据部件轮廓计算出质心并找出多个分布较远的吸附点,如图7所示。
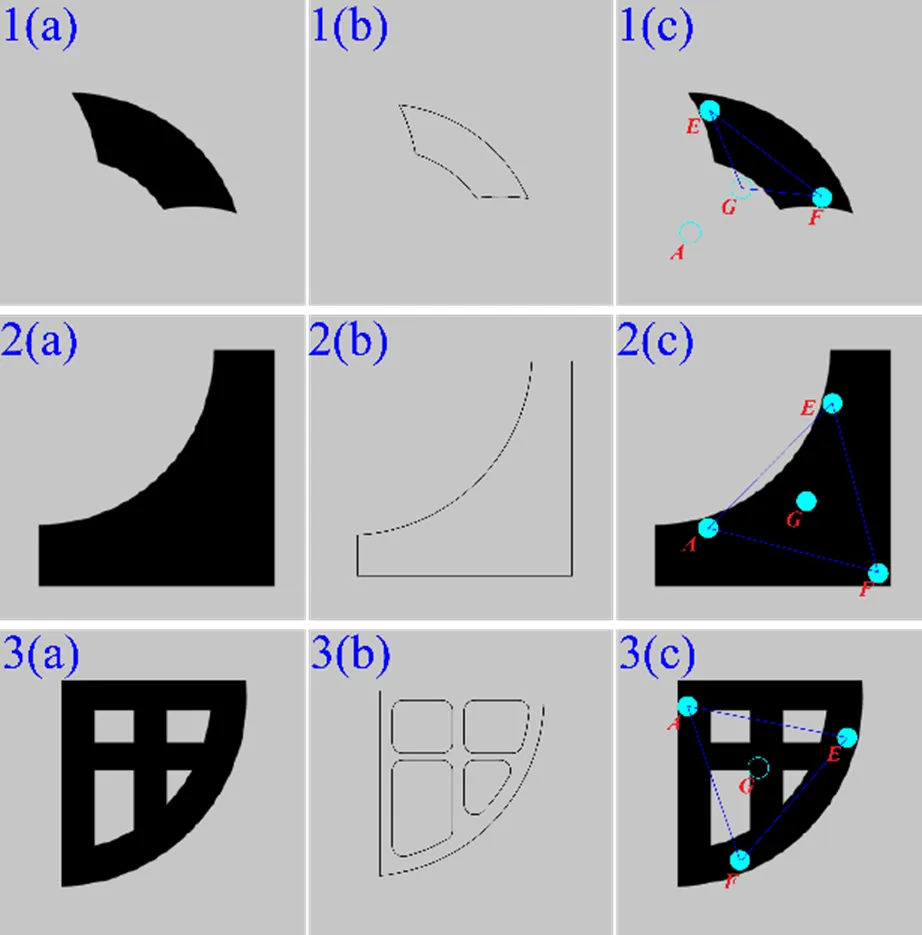
(a) 瓷砖部件轮廓 (b) 瓷砖部件可吸附区域 (c) 吸附点分布示意图
实验采用IRB2600六自由度机器人、MER-2000- 19U3M相机对部分尺寸、形状不一的瓷砖部件进行吸附拾取实验,其中瓷砖部件随机摆放在背光板上,工业相机置于背光板正上方。

(a) 多吸附点规划结果 (b) 机器人吸附瓷砖部件
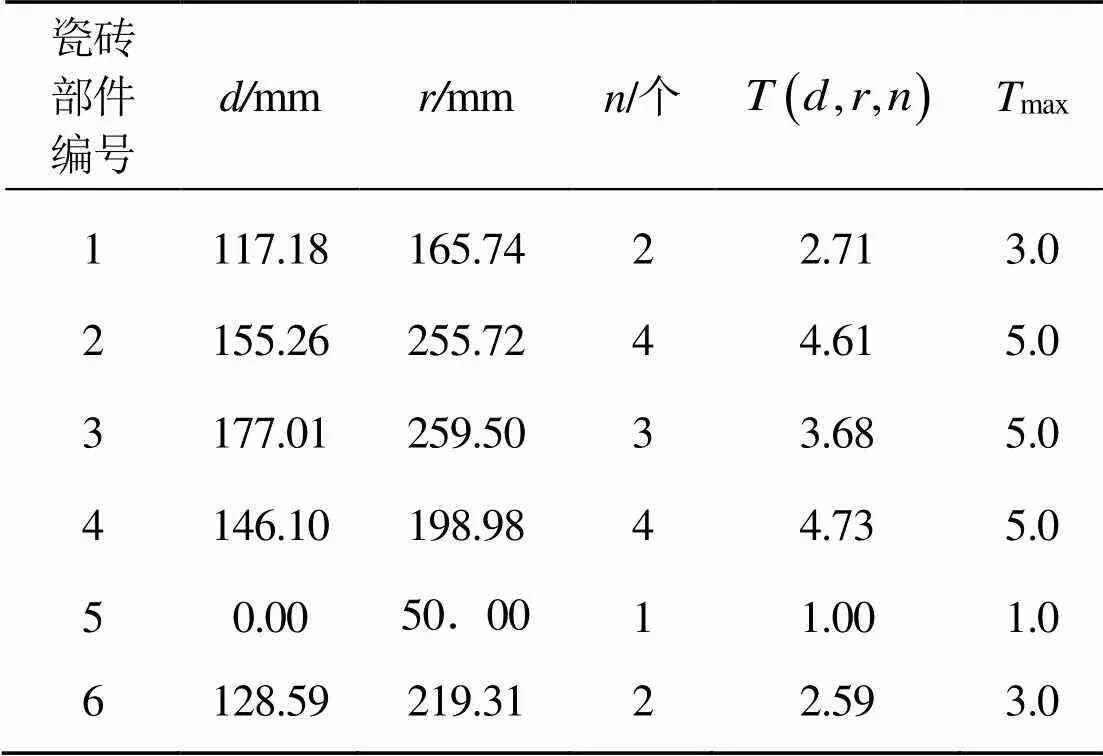
表1 瓷砖部件吸附参数与稳定性评价指标
对不同尺寸的瓷砖部件进行针对性分析:2、3、4号瓷砖部件,最大吸附稳定性max= 5;1、6号细长形瓷砖部件,最大吸附稳定性max= 3;尺寸小于装置可吸附范围的5号瓷砖部件,采用单点吸附,稳定性依赖于是否对瓷砖部件的质心进行吸附。
实验结果分析:首先,瓷砖部件的吸附稳定性趋于最优,在忽略瓷砖部件形状和尺寸对吸附稳定性的影响下,说明多吸附点优化规划算法所得的吸附点分布可达到稳定性最优;然后,可调节真空吸附装置及所提出的多吸附点优化规划算法适用于大部分瓷砖部件的轮廓,其自适应性和可行性也得到验证;最后,实验过程中根据瓷砖部件的轮廓规划出吸附点,并让机器人对背光板上随机摆放的瓷砖部件进行吸附,说明多点吸附控制系统的可行性。
5 结论
本文针对形状各异、尺寸差别明显的瓷砖拼花部件的自动化拾取和放置,提出一种可调节真空吸附装置和多点吸附控制系统,并提出一种基于吸附抓取稳定性最优的多吸附点优化规划算法。
通过瓷砖部件仿真以及机器人吸附瓷砖部件实验,面向瓷砖拼花的机器人末端执行器及吸附点规划算法能满足不同瓷砖部件的自适应吸附需求,同时验证了机器人末端执行器——可调节真空吸附装置、多吸附点规划优化算法和多点吸附控制系统的可行性,对常见轮廓、含内轮廓等特征和细长轮廓等不同瓷砖部件具有较好的适应性,且能达到吸附稳定性最优。
[1] 张浩.视觉引导的机器人平面拼图关键技术研究[D].广州:广东工业大学,2018.
[2] KEVIN T , ABDUL-RAHMAN E S , MOHAMMADALI S , et al. State of the art robotic grippers and applications[J]. Robotics, 2016,5(2):11-30.
[3] 高锐,张伟,王勇.结构用集成材自动上下料装置真空吸附系统设计与试验[J].林业工程学报,2021,6(2):126-132.
[4] 张艳朋,胡建,葛丽敏,等.一种铅锭搬运机器人真空吸附夹具的设计与分析[J].机床与液压,2016,44(5):142-145.
[5] 司震鹏,曹西京,姜小放.真空吸附式机械手系统设计[J].包装与食品机械,2009,27(6):26-30.
[6] MANTRIOTA G. Optimal grasp of vacuum grippers with mul-tiple suction cups[J]. Mechanism & Machine Theory, 2006, 42(1):18-33.
[7] 赵维福.龙虱吸盘的仿生学特性及其真空吸盘组的仿真模拟研究[D].长春:吉林大学,2006.
[8] TAYLAN Atakuru, EVREN Samur. A robotic gripper for picking up two objects simultaneously[J]. Mechanism and Ma-chine Theory, 2018,121:583-597.
[9] SDAHL M, KUHLENKOETTER B. CAGD-computer aided gripper design for a flexible gripping system[J]. International Journal of Advanced Robotic Systems, 2008,2(2):135-138.
[10] MOTZKI P, KUNZE J, HOLZ B, et al. Adaptive and energy efficient SMA-based handling systems[C]//Spie-active & Passive Smart Structures & Integrated Systems. International Society for Optics and Photonics, 2015.
Robot End Effector and Adsorption Point Planning Algorithm for Tile Mosaic
CHEN Jietao1CHEN Huanle1TAN Jiongyu1JIANG Xiaoming2
(1. Guangdong University of Technology, Guangzhou 510006, China 2. Institute of Intelligent Manufacturing, Guangdong Academy of Science, Guangzhou 510070, China)
In view of the challenge that the current tile mosaic industry depends on manpower and tile parts with different shapes and sizes, a robot end effector and adsorption point planning algorithm for tile mosaic are designed, and a multi-point adsorption control system and a multi-point adsorption point optimization planning algorithm based on the optimal adsorption grasping stability are proposed. Experiments verify the feasibility of the algorithm and its adaptability to ceramic tile parts with different shapes and sizes.
robot; multiple adsorption points; adjustable point; vacuum adsorption; tile mosaic
广东省应用型科技研发专项资金项目(2015B090922003)
陈洁涛,陈焕乐,谭炯钰,等.面向瓷砖拼花的机器人末端执行器及吸附点规划算法[J].自动化与信息工程, 2022,43(1):33-37.
CHEN Jietao, CHEN Huanle, TAN Jiongyu, et al. Robot end effector and adsorption point planning algorithm for tile mosaic[J]. Automation & Information Engineering, 2022,43(1):33-37.
陈洁涛,男,1994年生,硕士研究生,主要研究方向:机器视觉、智能制造。E-mail: 630502426@qq.com
蒋晓明(通信作者),男,1973年生,博士,副研究员,主要研究方向:电力电子装备技术。E-mail: xm.jiang@giim.ac.cn
TP242.2;TP391.41
A
1674-2605(2022)01-0006-05
10.3969/j.issn.1674-2605.2022.01.006
