基于半实物仿真的工业机器人末端振动分析*
2022-03-11樊依圣徐鸣刘文威董成举
樊依圣 徐鸣 刘文威 董成举
开发设计
基于半实物仿真的工业机器人末端振动分析*
樊依圣1徐鸣2刘文威1董成举1
(1.工业和信息化部电子第五研究所,广东 广州 511370 2.海军装备部重大专项项目管理中心,北京 100071)
速度规划算法作为工业机器人控制技术的关键环节,其加速度的连续性对机器人振动性能有较大影响。目前,工业机器人控制系统大多采用集成式的控制器或运动板卡,控制系统封闭,运动控制算法权限没有开放给用户。为解决集成式控制系统运动控制算法受限的问题,基于dSPACE设计工业机器人半实物仿真控制系统,对比T型速度规划算法和S型速度规划算法下工业机器人末端的振动表现,并进行定量分析。实验结果表明,利用S型速度曲线替代T型速度曲线进行速度规划时,工业机器人末端加速度峰峰值降低了20.5%,低频振动振幅降低了30%,机器人末端振动显著减小。
半实物仿真;工业机器人;末端振动;速度规划;S型速度曲线
0 引言
随着工业机器人应用范围的扩大及生产效率的提高,其正朝大负载、高速化方向发展。负载和速度的提高导致工业机器人运行时惯性力增大,从而产生振动效应。工业机器人的减速机构通常由谐波减速器、传动轴、齿轮等组成,这些柔性关节会对机器人动力学产生影响,导致机器人结构的固有频率降低,使机器人在运行中易产生共振[1]。振动不仅影响机器人自身的位姿精度,而且在低频(10~30 Hz)时还可能引起周边设备的共振[2]。因此,抑制柔性关节产生低频振动的相关技术成为工业机器人研究的热点和方向。
柔性关节机器人振动抑制方法主要有结构优化设计、机敏材料应用、反馈控制、开环控制等4种。其中,结构优化设计简单易实现,但振动抑制效果不明显[3-4];机敏材料应用增加系统复杂性,使系统控制更加繁琐[5];反馈控制需要增加额外的传感器,对机器人结构空间有一定要求[6-7];开环控制以轨迹规划优化为典型[8-9]。宁学涛等人[10]在关节空间内采用五次插值多项式进行运动轨迹拟合,虽然运动参数的连续性可以得到保证,但存在龙格现象;叶增林等人[11]提出一种带有速度和加速度约束的梯型速度规划算法,虽然一定程度地减小了振动,但加速度的不连续性没有得到有效解决;ZHANG Y等人[12]对正弦速度曲线进行修正,通过变量优化使转矩平滑,从而减小振动,但未考虑速度约束。对比上述速度规划算法,S型曲线速度规划算法不仅能保证加速度等参数的连续性,避免运动参数突变造成的冲击,而且能满足运动参数的约束。
本文以工业六轴机器人低频阶段的振动为抑制目标,以S型速度曲线替代T型速度曲线作为速度规划算法;搭建实验对这2种速度规划算法下的时/频域振动信号进行定量比较分析,从而验证S型曲线速度规划算法在工业机器人末端振动抑制方面的优越性。
1 运动学建模
工业六轴机器人本体主要包括机械本体和管线包2部分。其中,机械本体主要由底座、大臂、小臂、手腕4小部分组成,如图1所示;管线包串接于工业六轴机器人本体内部,主要由电机动力线、编码线、I/O信号接口、气管等组成。

1—底座;2—大臂;3—小臂;4—手腕。
工业六轴机器人运动学模型如图2所示。
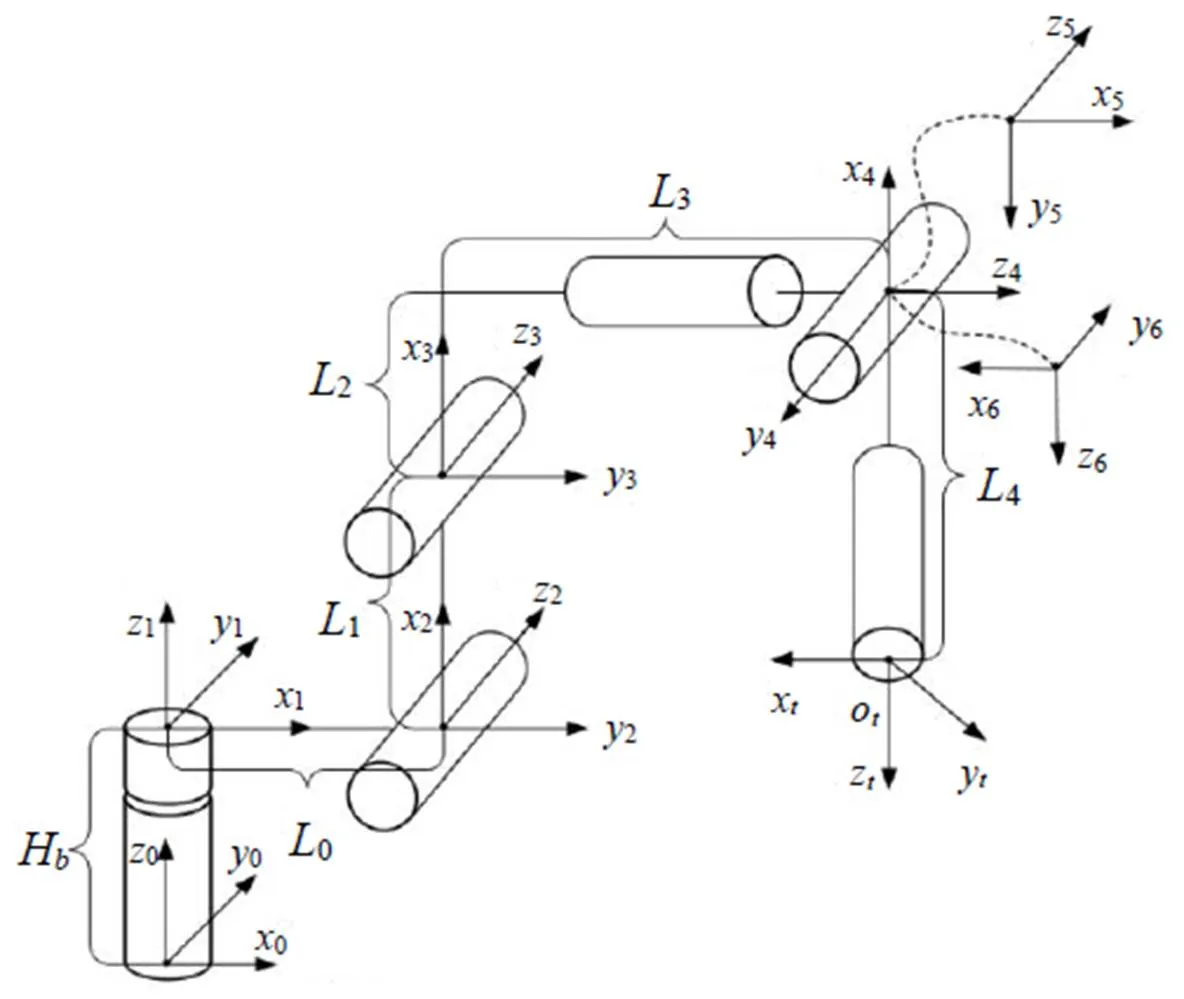
图2 工业六轴机器人运动学模型

表1 工业六轴机器人连杆参数
本文以六自由度串联机器人ER3A-C60为例,采用改进D-H方法(modified denavit-hartenberg,MDH)对机器人进行运动学建模。
1.1 正运动学建模
工业机器人正运动学问题是求工业机器人运动学的正解,即在给定组成运动副相邻连杆的相对位置情况下,确定工业机器人末端执行器的位置和姿态。
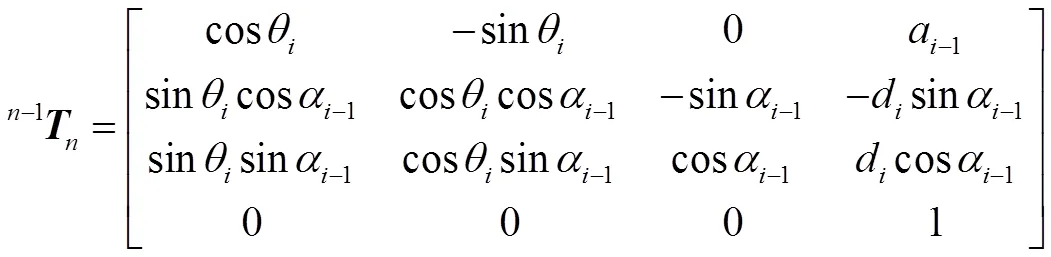
确定连杆变换矩阵为
各连杆矩阵相乘可得到工业机器人的末端坐标系和基坐标系之间的关系矩阵:
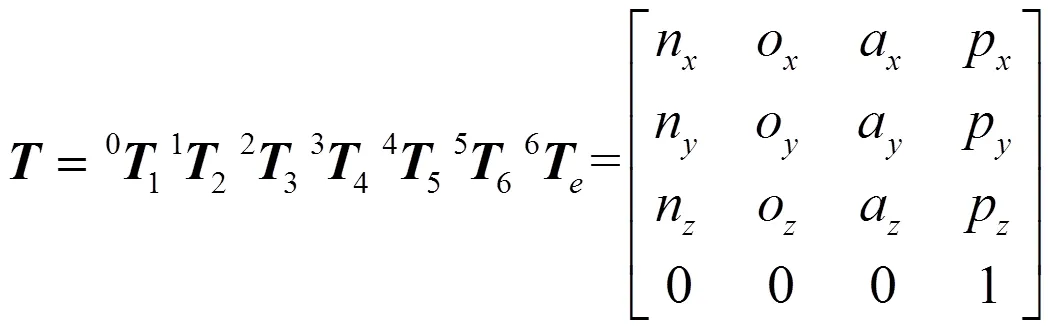
式中:

式中:
1.2 逆运动学建模
工业机器人逆运动学问题是求工业机器人运动学的逆解,即给定末端执行器位置和方向的值,求其对应的各关节变位量。
对于六自由度串联机器人的逆运动学求解,主要方法有代数法、几何法和解析法3种。其中,代数法直接求取机器人每个关节角与旋转矩阵中元素的对应关系,求解方法直观,计算效率高、速度快。
以工业六轴机器人为例,结合连杆参数进行逆运动学建模。对公式(2)进行矩阵处理,得到各关节位置为


式中:






式中:


式中:




2 速度规划算法
速度规划主要为避免工业机器人在启动和停止时产生冲击、振动等现象,关键是速度规划算法。在工业机器人控制系统中,普遍采用T型速度曲线和S型速度曲线进行速度规划。
2.1 T型曲线速度规划算法
T型曲线速度规划算法广泛应用于锻造机器人、码垛机器人等效率要求较高的机器人领域。完整的T型速度曲线如图3所示,可分为匀加速、匀速和匀减速3个阶段。运动过程中最大速度为m,最大加速度为m。

图3 T型速度曲线
T型曲线速度规划算法的规划可分为存在匀速阶段、不存在匀速阶段2类。假设位移为,存在匀速阶段,则说明2。由于T型速度曲线左右对称,可求得

当位移满足公式(11)时,则匀速阶段存在。
T型曲线速度规划算法简单、占用时间少、响应快、效率高,但在加减速阶段的起点和终点处有加速度突变,存在运动冲击。
2.2 S型曲线速度规划算法
相较于T型曲线速度规划算法,S型曲线速度规划算法引入了加加速度Jerk对加速度进行精确控制,实现加速度连续,避免加速度突变引起振动和冲击,降低机器人损伤,具有较好的柔性。完整的S型速度曲线如图4(a)所示,分为加加速阶段、匀加速阶段、减加速阶段、匀速阶段、加减速阶段、匀减速阶段和减减速阶段7个阶段。S型速度曲线的加速度曲线如图4(b)所示。
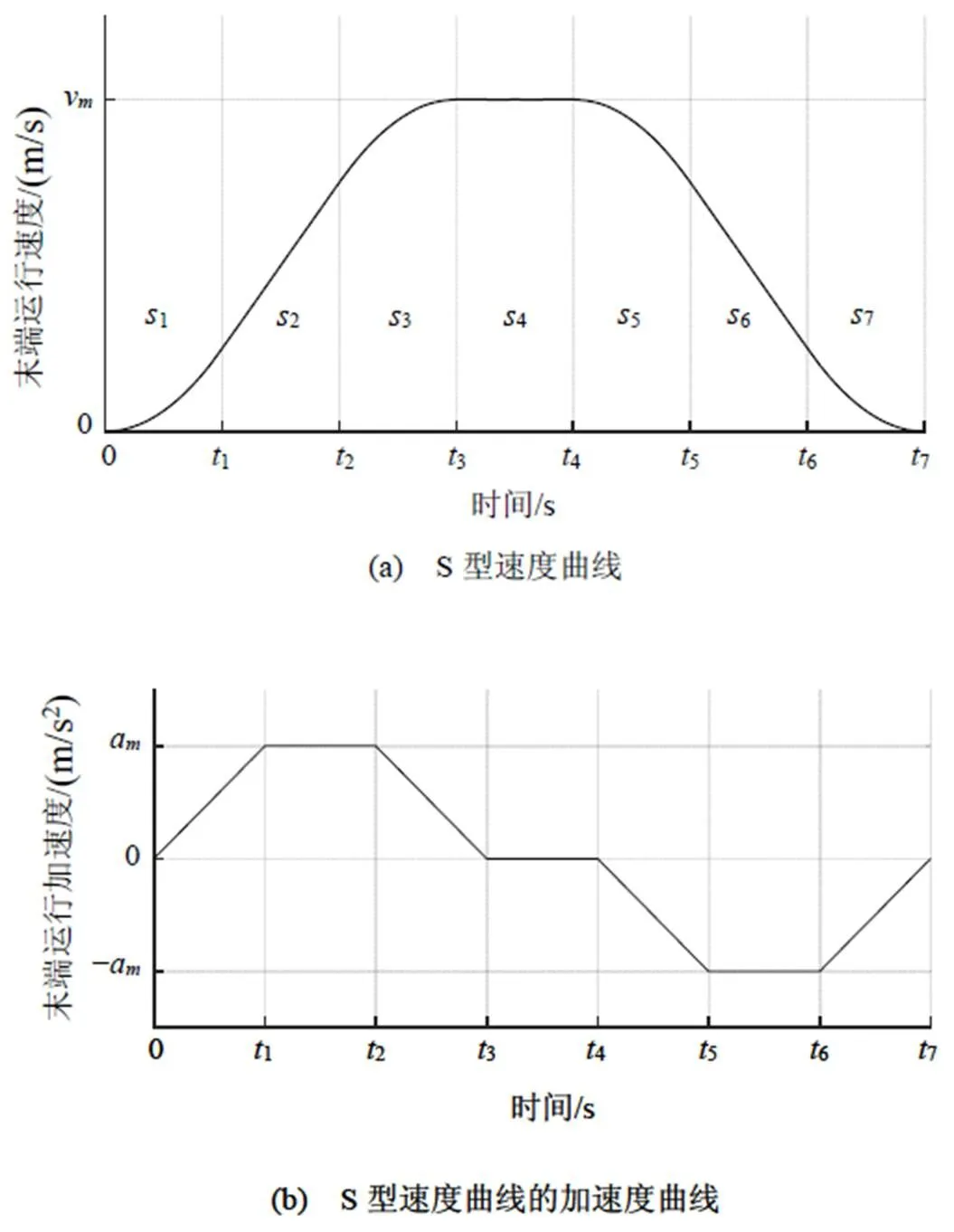
图4 S型速度曲线及其对应的加速度曲线
S型速度曲线的计算需确定以下参数:机器人末端位移、初始速度0、最大速度m、最大加速度m、加加速度。参数不同导致S型速度曲线表现出不同的形式,如给定位移太小时,速度无法从0变换到m,这将导致S型速度曲线不存在匀速阶段。根据不同的加速、减速和匀速阶段存在的情况,S型速度曲线共有17种情况。本文仅考虑S型速度曲线7个阶段都存在的情况。如图4(b)所示,加速度经过1时间的加加速阶段后达到m,时间1的计算公式为

经过3时间后,速度达到v


将参数代入求得

3 半实物仿真控制系统搭建
工业机器人半实物仿真控制系统主要由上位机操作站、dSPACE实时仿真控制器、MATLAB/ Simulink仿真软件、交流伺服电气柜和机器人本体组成,如图5所示。
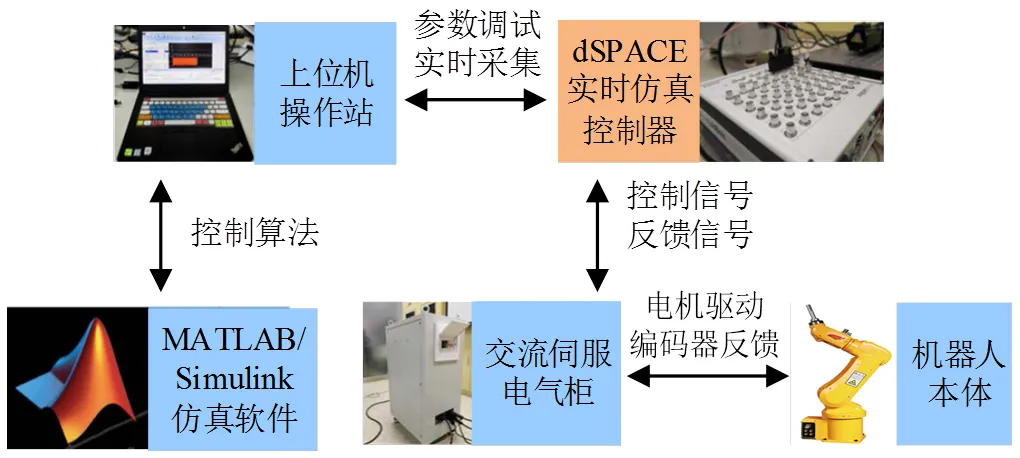
图5 工业机器人半实物仿真控制系统组成
利用MATLAB中Simulink模块搭建工业机器人运动学仿真模型,同时编写控制算法,调用硬件接口库实现Simulink仿真模型与实际硬件接口的连接与通讯;通过串口将MATLAB生成的M代码下载到dSPACE实时仿真控制器;控制器接收交流伺服电气柜和机器人本体的反馈信号,通过运动控制算法进行信号分析处理,从而输出控制信号实现机器人控制。
工业机器人半实物仿真控制算法包括机器人轨迹规划、正/逆解、伺服使能、控制器和反馈6个模块。其中机器人轨迹规划模块作为整个运动控制算法的核心,主要分为3部分:
1)笛卡尔坐标系下点动控制;
2)笛卡尔坐标系下的T型曲线速度规划算法和S型曲线速度规划算法程序;
3)位置指令逻辑切换,如图6所示。
正/逆解模块以运动学模型为基础,主要对工业机器人进行坐标系变换和运动学分析控制;伺服使能模块控制6个伺服驱动器使能。
反馈模块如图7所示。首先,工业机器人上电时通过RS232接口读取其初始位置;然后,通过与各轴的增量值相加,得到工业机器人的实时关节反馈;最后,根据各关节减速器减速比,计算减速器端输出的实际关节弧度。
控制器模块根据反馈模块的输出选用比例(P)算法进行工业机器人位置闭环控制。此外,控制器模块还做逻辑选择,分别选择机器人回零、关节/笛卡尔坐标系的输入、速度指令等,通过DA转换器输出。

图6 轨迹规划模块组成
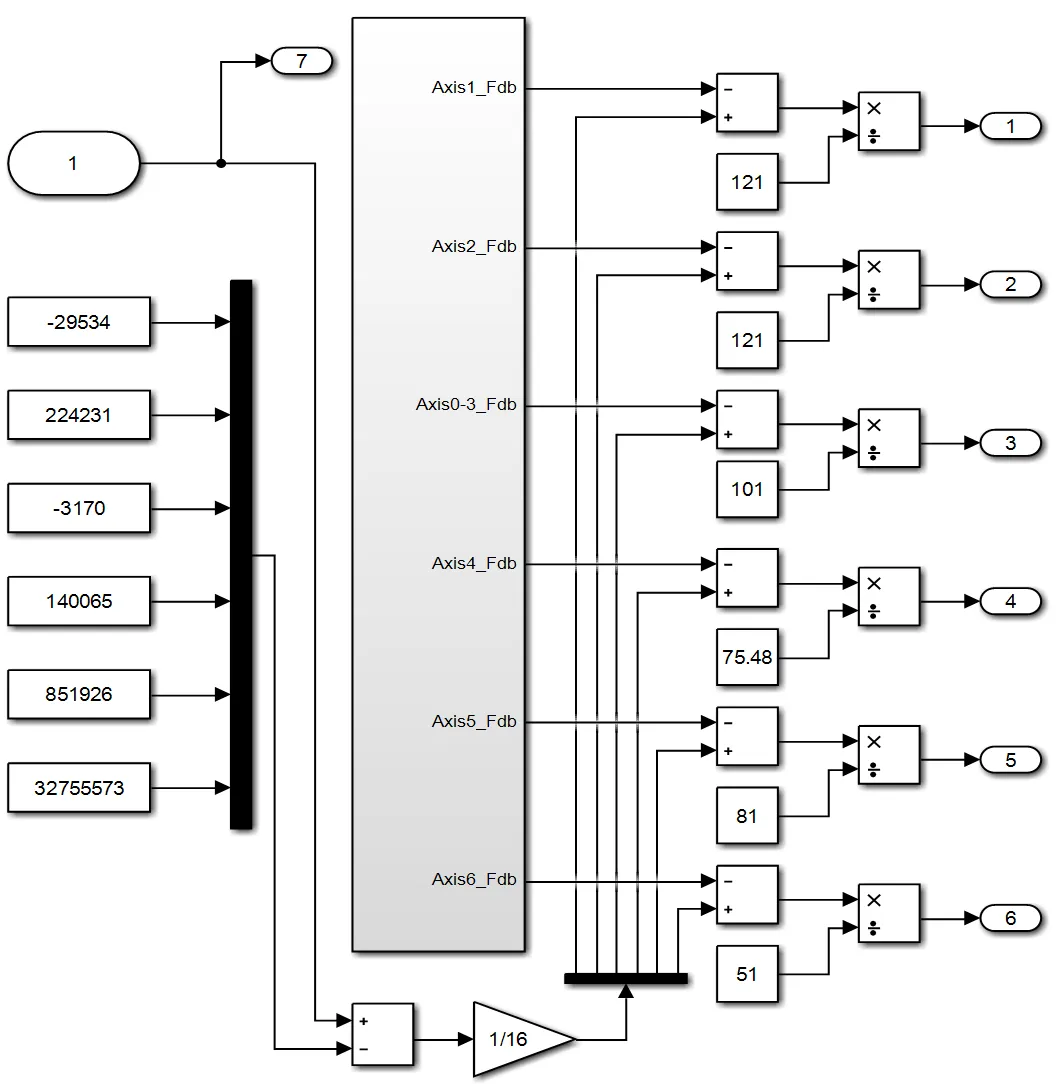
图7 反馈模块
4 实验验证
工业机器人末端的振动状态可通过末端加速度振动的幅值来描述,搭建实验系统,如图8所示。

图8 工业机器人半实物仿真控制实验系统
工业机器人半实物仿真控制实验系统包括加速度传感器、振动测量仪、工业机器人本体、计算机以及dSPACE实时仿真控制系统。加速度传感器置于工业机器人末端,用以测量其末端加速度值;加速度传感器的输出信号通过振动测量仪转换为数字信号并保存。
通过MATLAB将T型曲线速度规划算法和S型曲线速度规划算法应用于工业机器人半实物仿真控制系统,分析和处理检测到的振动信号,并进行振动抑制效果比较,结果如表2、图9、图10所示。
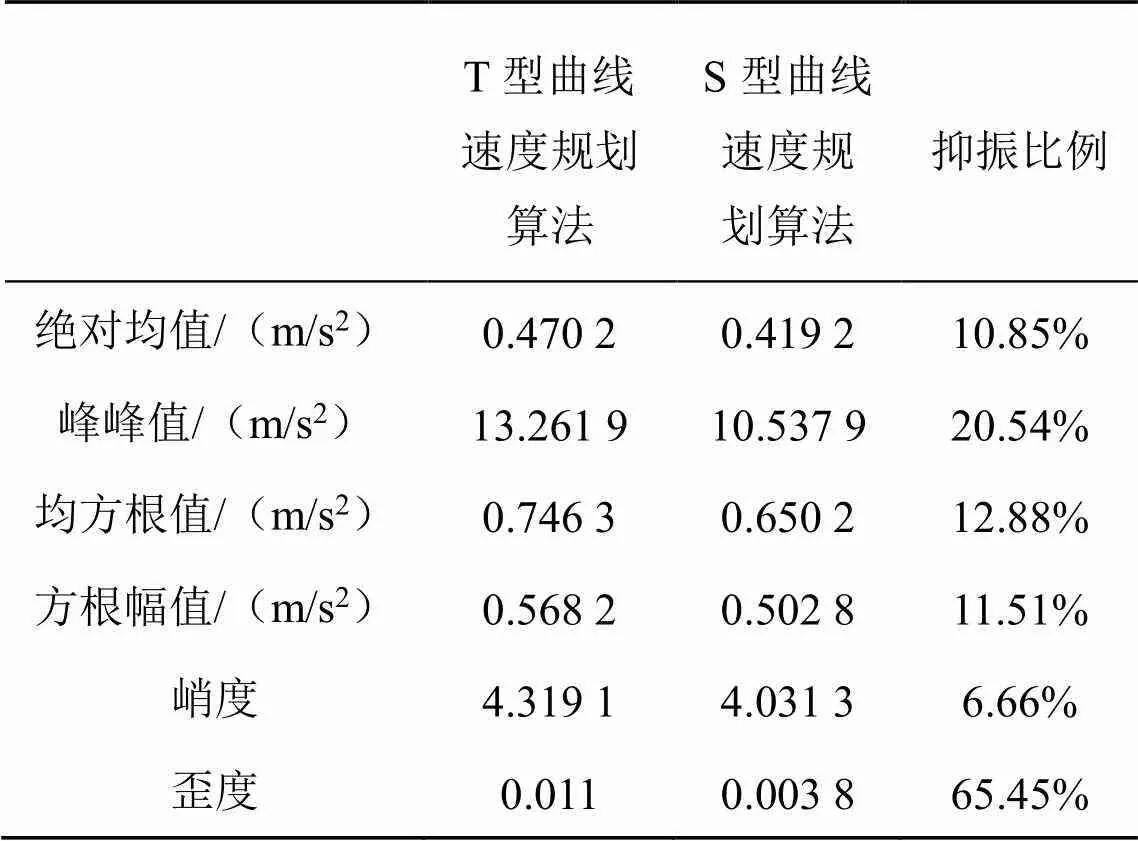
表2 2种速度规划算法下的振动数据对比结果

图9 T型曲线速度规划算法下加速度时/频域响应

图10 S型速度规划算法下的加速度时/频域响应
实验结果表明:采用T型曲线速度规划算法时,机器人末端的加速度峰峰值为13.261 9 m/s2,在10~ 30 Hz低频段内的最大幅值为0.009 5 m/s2;采用S型曲线速度规划算法时,机器人末端的加速度峰峰值为10.537 9 m/s2,比T型曲线速度规划算法降低了20.5%,在10~30 Hz低频段内的最大幅值为0.006 8 m/s2,降低了30%,抑振效果明显。由此验证了S型曲线速度规划算法相较于T型曲线速度规划算法在机器人振动抑制性能方面的优越性。
5 结语
本文根据工业六轴机器人运动学模型进行半实物仿真控制系统的设计,并将T型曲线速度规划算法和S型曲线速度规划算法应用于工业机器人末端振动实验。实验结果表明:工业机器人末端加速度峰峰值降低了20.5%;低频振动的振幅降低了30%。由此说明在运动精度要求较高的应用场合,工业机器人控制系统宜采用S型速度规划算法进行末端轨迹规划和速度控制。
[1] 强艳辉.工业机器人关节柔性分析与减振控制[D].北京:中国科学院大学,2012.
[2] 吴明月,刘延杰,蔡鹤皋.基于最优S型曲线轨迹的硅片传输机器人末端振动抑制方法[J].机器人,2014,36(4):446-454.
[3] ONODA J, SANO T, MINESUGI K. Passive damping of truss vibration using preloaded joint backlash[J]. Aiaa Journal, 2012, 33(7):1335-1341.
[4] ZHANG Y H, HE W D, XIAO J J. Dynamical model of RV reducer and key influence of stiffness to the nature character[J]. IEEE Computer Society, 2010:192-195.
[5] 宋轶民,张策,马文贵.压电材料在机敏结构振动控制中的应用[J].机械设计,1999(4):26-29.
[6] 吴震宇,袁惠群,罗宝佳,等.关节型工业机器人扭转振动的伺服补偿技术研究[J].振动与冲击,2020,39(9):132-137.
[7] 韩亚丽,刘聪,郭亚男.双连杆柔性机器人手臂的非线性自适应鲁棒控制器设计[J].机床与液压,2020,48(3):47-51,23.
[8] 李国洪,王远亮.基于B样条和改进遗传算法的机器人时间最优轨迹规划[J].计算机应用与软件,2020,37(11):215-223, 279.
[9] 李宝华,刘麒,王影,等.基于模糊控制算法的六自由度工业机器人运动路径规划[J].科技经济导刊,2019,27(13):58.
[10] 宁学涛,潘玉田,杨亚威,等.基于运动学和动力学的关节空间轨迹规划[J].计算机仿真,2015,32(2):409-413.
[11] 叶增林,陈华,吴昊.基于带约束的修正梯形加速度规律规划算法研究[J].河南工程学院学报(自然科学版),2020,32(4): 53-58.
[12] ZHANG Y, HUANG R, LOU Y, et al. Dynamics based time-optimal smooth motion planning for the delta robot[C]// Robotics and Biomimetics (ROBIO), 2012 IEEE International Conference on. IEEE, 2013.
End Vibration Analysis of Industrial Robot Based on Semi-physical Simulation
FAN Yisheng1XU Ming2LIU Wenwei1DONG Chengju1
(1.The Fifth Institute of Electronics, Ministry of Industry and Information Technology,Guangzhou 511370, China 2.Major Special Project Management Center of the Naval Equipment Department, Beijing 100071, China)
As the key link of industrial robot control technology, the continuity of acceleration has a great impact on the vibration performance of the robot. At present, industrial robot control systems mostly use integrated controller or motion board. The control system is closed, and the authority of motion control algorithm cannot be opened to users. In order to solve the problem that the motion control algorithm of the integrated control system is limited, thesemi-physical simulation control system of industrial robot is designed based on dSPACE, the vibration performance of the end of industrial robot under T-curve velocity profile planning algorithm and S-curve velocity profile planning algorithm is compared and analyzed quantitatively. The experimental results show that when using S-curve instead of T-curve for speed planning, the peak and peak acceleration of industrial robot end is reduced by 20.5%, the low-frequency vibration amplitude is reduced by 30%, and the robot end vibration is significantly reduced.
semi-physical simulation; industrial robot; end vibration; speed planning; S-curve velocity profile
樊依圣,徐鸣,刘文威,等.基于半实物仿真的工业机器人末端振动分析[J].自动化与信息工程,2022,43(1):25-32.
FAN Yisheng, XU Ming, LIU Wenwei, et al. End vibration analysis of industrial robot based on semi-physical simulation[J]. Automation & Information Engineering, 2022,43(1):25-32.
广州市科技计划项目(202002030314)
樊依圣,男,1996年生,硕士研究生,助理工程师,主要研究方向:工业机器人控制技术研究。E-mail: 18813120471@163.com
徐鸣(通信作者),男,1982年生,大学本科,工程师,主要研究方向:装备项目管理工作。E-mail: xugongmei@hotmail.cn
刘文威,男,1987年生,博士研究生,高级工程师,主要研究方向:智能机器人质量可靠性与仿真技术研究。
董成举,男,1991年生,硕士研究生,工程师,主要研究方向:机器人可靠性技术。
TP249
A
1674-2605(2022)01-0005-08
10.3969/j.issn.1674-2605.2022.01.005
