一种局部几何关键点的激光点云配准方法
2022-03-11于振




摘 要:在对激光点云配准时,原始点云的高密度和大数据量都会造成点云粗配准具有很高的时间代价和不稳定的配准精度。点云精配准是以粗配得到的配准参数作为输入,通常采用标准的ICP算法寻找对应点并迭代计算最佳的配准参数。为了提升激光点云配准的精度和稳健性,提出利用3D DoG算子在点云中提取具备曲率不变性的关键点,然后将关键点云输入4PCS算法中对点云做粗配准,最后采用标准ICP算法执行精配准。在采用上述方法对三组激光点云数据做配准试验后,验证了该方法的有效性。
关键词:点云配准;3D-DoG;4PCS;局部几何关键点
中图分类号:TP391 文献标志码:A 文章编号:1003-5168(2022)1-0025-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2022.01.005
A Laser Point Cloud Registration Based on Local Geometric Key Points
YU Zhen
(Shandong Huayu Institute of Technology, Dezhou 253000,China)
Abstract:The laser point cloud has high density and large amount of data, which will cause the point cloud coarse registration to have a high time cost and unstable registration accuracy. Point cloud fine registration takes the transformation parameters obtained from the coarse registration as the initial value, and usually uses the standard ICP algorithm to find the corresponding points and iteratively optimize the transformation parameters. For improve the accuracy and robustness of the laser point cloud registration, this paper proposes to use the 3D DoG operator to extract the key points with curvature invariance, and then input the key point cloud into 4PCS algorithm performs coarse registration, and finally uses the standard ICP algorithm to perform fine registration. After using the method in this paper to do registration experiments on three datasets, the effectiveness of the method is verified.
Keywords:point cloud registration; 3D-DoG; 4PCS; local geometric key points
0 引言
对三维点云进行配准是点云数据应用的基础性处理之一。三维点云的获取和应用存在多个方面,如利用三维激光扫描仪获取的三维点云数据可用于城市扩张监测[1]、森林结构评估[2]、地质灾害调查[3]、文化遗产保护[4]、高压输电线巡检[5]、高精度地圖构建等[6]。在计算机视觉领域,利用三角测量方法获取的密集三维点云可用于目标场景的表面三维重建[7]。受扫描仪测量范围的限制,需要将多测站的点云做配准才能得到整个场景的三维点云。点云配准的实质是计算点云之间的相对位置参数,然后将点云转换到统一的坐标系下。
当对三维点云进行配准时,首要任务是在两片点云间探测对应点[8],对应点的准确性会严重影响配准参数的计算精度。目前,在待配准点云和目标点云间探测对应点对的方法主要分为三类,分别是基于距离准则、基于特征准则和采用深度学习的方法[9]。
在点云数据获取时制约对应点探测精度的主要因素如下:①激光点云具有很高的密度。点云的密度较高会导致对应点探测和配准的时间代价很高,也会增加对应点的模糊性;②场景中移动物体的点云会造成点云在局部不具备刚体性质,即使是正确的对应点,也会因局部的“变形”影响全局参数的计算精度;③场景中的许多重复的结构(如立面和窗户)会增加对应点匹配的模糊性。
目前,根据对应点对估计点云配准参数的数学理论已经非常成熟。存在的难点是从不同场景的高密度三维点云中准确探测对应点。为此,笔者提出利用3D Difference of Gaussian(DoG)算子在待配准点云和目标点云之间提取具备局部几何特征的关键点,然后利用4-Points Congruent Sets(4PCS)算法对点云做粗配准,最后将粗配准的变换参数输入到标准Iterative Closest Point(ICP)算法中执行激光点云的精配准。
1 方法研究
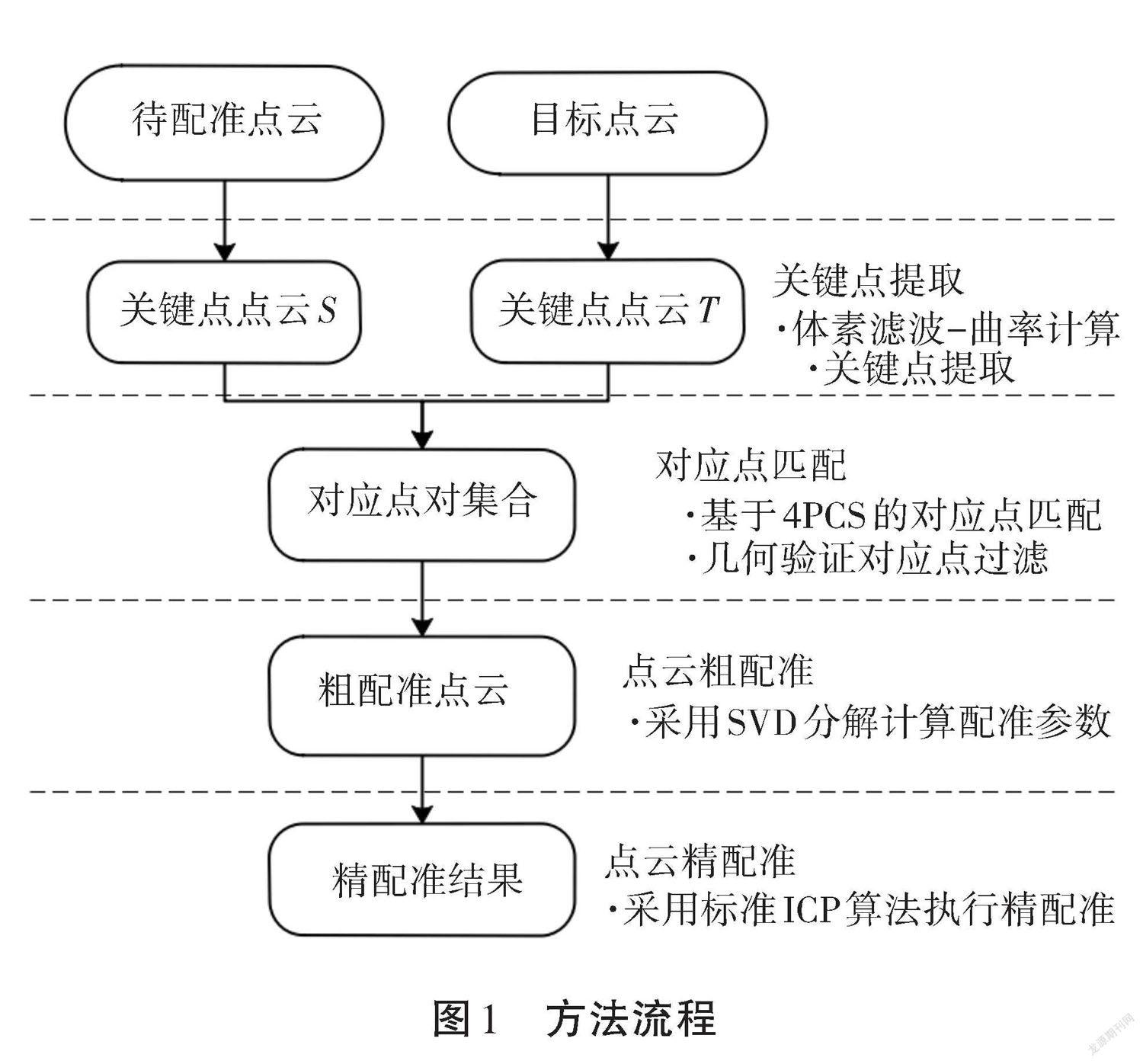
笔者采用的方法的核心思想是采用3D DoG算子在待配准点云和目标点云间提取具备较强几何特征的关键点,然后采用4PCS算法通过几何验证的方法在待配准点云和目标点云的关键点云中匹配对应点。点云的离散曲率信息是描述点云局部几何特性的重要属性。利用3D DoG算子提取点云在高斯尺度空间下的曲率关键点,这类关键点具备较强的几何表征性,可以有效降低对应点匹配的模糊性。然后利用4PCS算法根据几何验证匹配对应点,并利用SVD分解计算变换参数(R,T)。最后以粗配准的结果为初值,采用ICP算法迭代优化配准参数。方法流程如图1所示。
1.1 点云曲率计算
点云的曲率信息可用于表达点云在局部的几何特性。例如,平面区域的曲率值较小,而在弧面或棱角处的曲率值较大。另外,也可用曲率信息探测点云分布的几何形状。例如,在平面区域,点云的高斯曲率和平均曲率值趋近于零;在棱角处最大和最小曲率的方向互相垂直。采用局部曲面拟合法计算点云的离散曲率,具体过程如下:
①建立采样点[pi]的局部坐标系u,v,w,w是点pi处的法向量方向,u和v位于切平面内且与w垂直。
②以采样点[pi]为中心,选择k个邻近点拟合式(1)描述的二次曲面,并利用最小二乘计算曲面参数。
③根据式(2)、式(3)和上一步中得到曲面的参数和计算主曲率k1、k2,高斯曲率K和平均曲率H。
④重复①至③步骤,可以得到点云在每个采样点处的曲率值。
需要注意的是,为了降低计算代价,在计算曲率前首先采用体素滤波对原始点云做均匀下采样。在采样时为了保持点云的局部几何信息,通常计算体素内点的质心代替落在体素内的点,从而实现对原始点云的下采样。
1.2 几何关键点选择
计算下采样点云的曲率后,本文利用3D DoG算子提取点云在高斯尺度空间下的曲率关键点。DoG算子常被用于图像特征点的提取(如SIFT、SURF等)。DoG关键点的主要优点是其对尺度、旋转和平移的变换具有不变性。在二维图像中,DoG算子提取关键点的过程是利用不同模糊系数的高斯滤波器对图像做下采样,然后对下采样后相邻尺度的图像相减,得到高斯差分图像,最后在相邻高斯差分图中检测极值点。三维点云中探测具备曲率关键点的过程为:
①建立点云的尺度空间。采用一定大小的体素栅格建立点云的体素金字塔,根据式(4)计算在σ尺度空间下采样后体素的质心坐标pi。
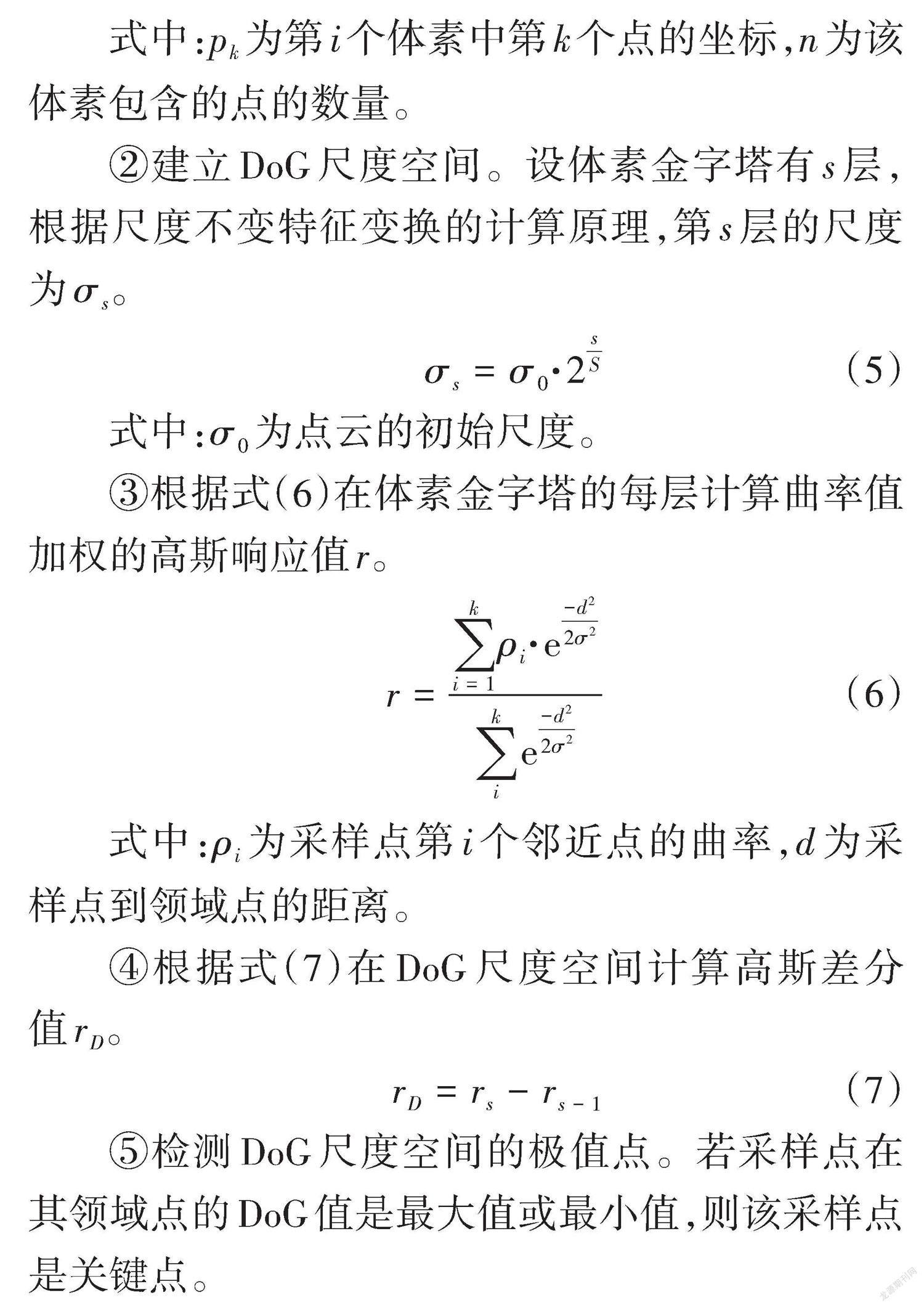
式中:pk为第i个体素中第k个点的坐标,n为该体素包含的点的数量。
②建立DoG尺度空间。设体素金字塔有s层,根据尺度不变特征变换的计算原理,第s层的尺度为σs。
式中:σ0为点云的初始尺度。
③根据式(6)在体素金字塔的每层计算曲率值加权的高斯响应值r。
式中:ρi为采样点第[i]个邻近点的曲率,d为采样点到领域点的距离。
④根据式(7)在DoG尺度空间计算高斯差分值rD。
⑤检测DoG尺度空间的极值点。若采样点在其领域点的DoG值是最大值或最小值,则该采样点是关键点。
1.3 基于4PCS算法和标准ICP的点云配准
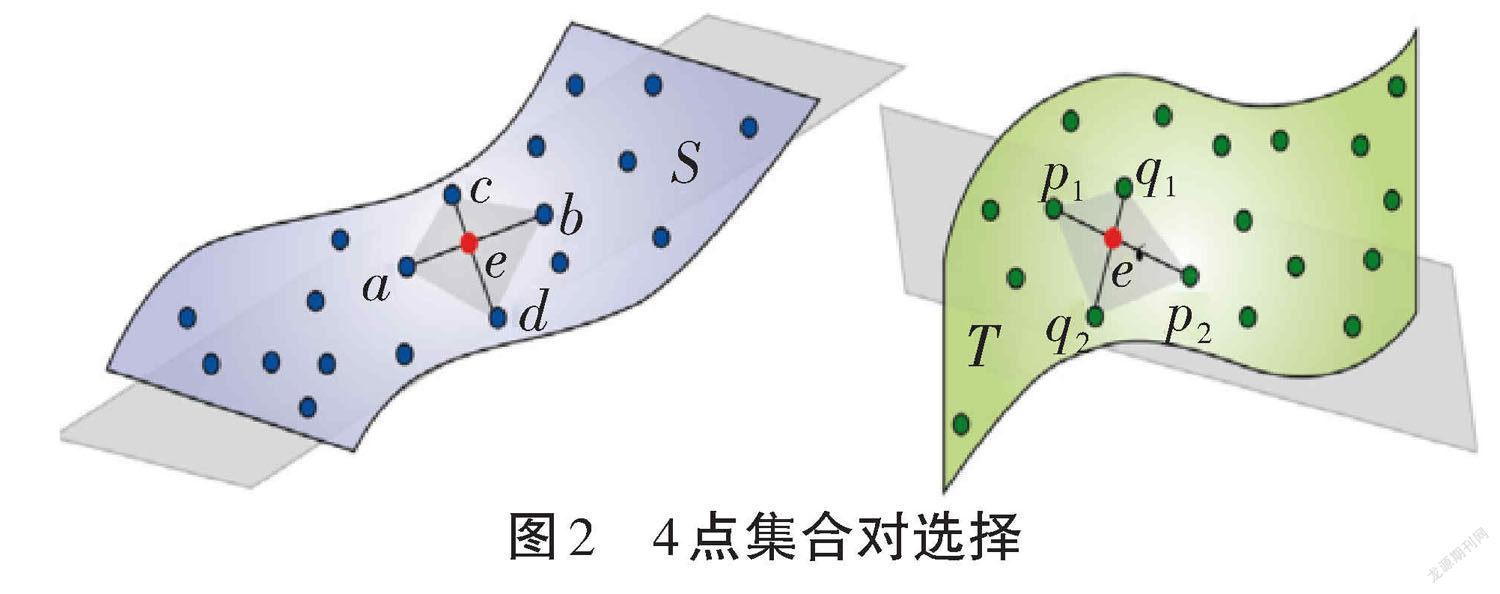
在对下采样后的点云做曲率关键点提取后,分别得到了待配准点云和目标点云的关键点云S和T。关键点云具有较低的密度和较强的几何特征。为了在关键点云间匹配对应点,如图2所示,首先采用4PCS算法根据仿射不变特性提取可能的4点集合对,然后利用距離不变性剔除低可靠的4点集合对,最后采用SVD分解计算变换参数。具体处理过程如下。
①在关键点云S中提取近似共面的4个点,并根据式(8)计算参数r1和r2。
②采用多次随机采样的办法在关键点云T中寻找满足式(1)的4点集。
③为了提高②中4点集的准确性,利用式(9)和式(10)做几何验证,如果不满足则剔除。
在式(9)和式(10)中,δ1=τ,δ2=4·τ,τ为对点云体素滤波下采样时体素的大小。
④重复执行①到③即可得到多对4点集合,然后采用SVD分解计算变换参数。
最后,以粗配准得到的变换参数为初值,采用标准的ICP算法对点云做精配准。
2 试验
2.1 试验环境与试验数据
为了验证上述方法的有效性,采用C++编程语言和点云处理开源库Point Cloud Library(PCL)实现该方法,并对2组室外场景和1组室内场景的激光点云做配准,程序运行的操作系统为Windows 10,CPU为Intel Core 3.3 GHz,内存为16 Gb的计算机。在配准前,3组数据中待配准点云和目标点云间的相对位置关系如图3所示。其中,Dataste-1和Dataset-2是用激光扫描仪获取的室外场景的三维点云,Dataset-3是室内场景的三维点云。
2.2 试验结果及分析
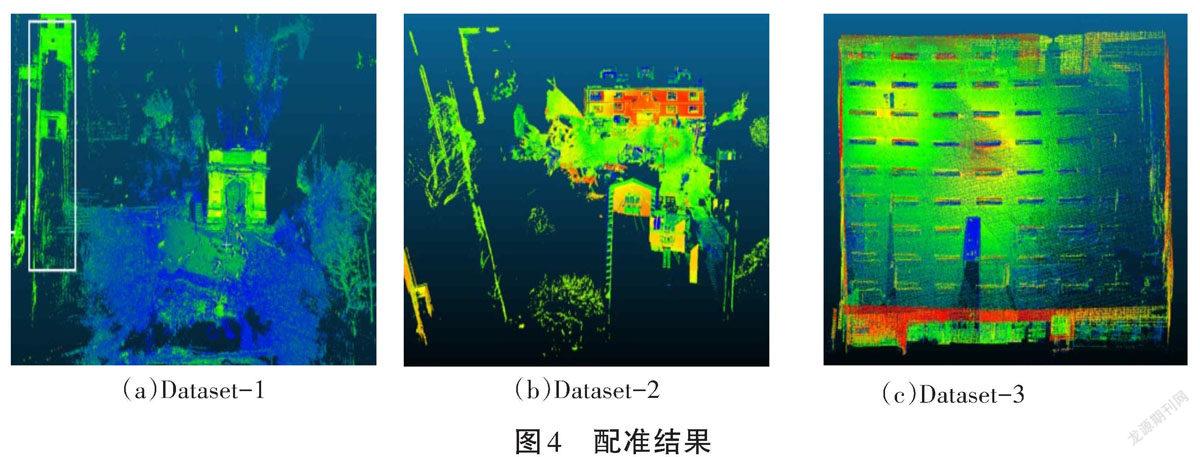
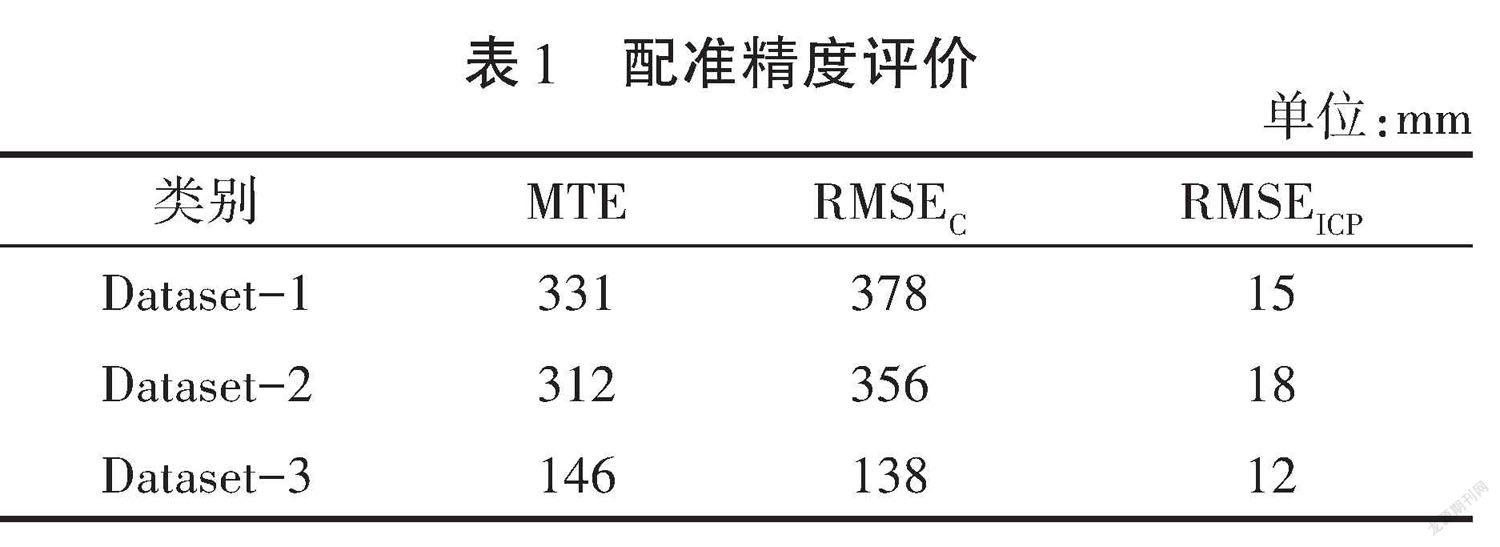
采用第一部分所述方法对3组数据配准后的结果如图4所示,配准后的精度评价如表1所示。为了定量评价本文方法对激光点云配准的精度,在粗配准后,统计了Mean Translation Error(MTE)和Root Mean Square Error(RMSE),即表1中的RMSEC,在精配准后统计了均方根误差即表1中的RMSEICP。
试验结果分析如下。
①从图4可以发现,采用该方法对室外场景的2组数据配准后,配准的结果较为准确,尤其在图4(a)中的方框区域可以发现,在边缘区域也可以得到较好的配准精度。从图4(c)可以看出,该方法对室内场景配准也可以取得较好的配准效果。
②定量分析。从表1可以看出,在粗配准和精配准后,室内场景点云的配准精度均高于室外场景。这是由于室内场景点云测程较小,噪声点少。重要的是,室内场景的点云具有更多的几何特征点,这会提升粗配准的稳健性。从精配准后的均方根误差可以看出,3组数据的配准误差均小于2 cm,证明采用本文方法对大场景的激光点云配准可以取得可靠的配准结果。
3 结论
为了降低对应点匹配的模糊性,提出利用3D DoG算子提取下采样点云中具备曲率不变性的关键点,然后利用4PCS算法在关键点云中配准对应点。为了提高对应点的内点率,在4PCS算法的基础上采用几何约束条件剔除低可靠的4点集合对,从而提高了粗配准的精度。该方法存在的缺点是体素滤波下采样的体素大小对局部几何关键点提取有较强的影响,根据点云密度及配准精度自适应计算最佳的体素大小是进一步研究的内容。另外,配准的处理流程较为复杂,目前还不能实现激光点云的实时配准。
参考文献:
[1] 孟蕾,崔珍珍.基于星载点云数据的城市土地利用变化监测自动提取技术[J].北京测绘,2020(7):929-933.
[2] 范伟伟,刘浩然,徐永胜,等.基于地基激光雷达和手持式移动激光雷达的单木结构参数提取精度对比[J].中南林业科技大学学报,2020(8):63-74.
[3] 薛强,毕俊擘,李政国,等.三维激光扫描技术在阎家沟滑坡变形监测中的应用[J].中国地质灾害与防治学报,2018(3):108-112.
[4] 赵夫群,周明全.文物点云模型的优化配准算法[J].计算机应用研究,2017(12):3885-3888.
[5] 付红安.基于多尺度特征向量的输电线跑无人机LiDAR点云数据分类方法[J].山东农业大学学报(自然科学版),2019(5):852-854,864.
[6] 杨玉荣,李峰.基于激光点云扫描的高精导航地图关键技术研究[J].现代计算机(专业版),2018(9):23-26.
[7] 苗沛基,卢小平,李英成,等. 融合倾斜摄影和点云的公路沿线精细化三维重建方法[J].测绘与空间地理信息,2020(6):67-69,74,80.
[8] HABIB A,DETCHEV I,BANG K.A comparative analysis of two approaches for multiple-surface registration of irregular point clouds[J]. Remote Sens. Spatial Info. Sci.,2010(1):61-66.
[9] DONG Z,LIANG F,YANG B, et al. Registration of large-scale terrestrial laser scanner point clouds: A review and benchmark[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 163:327-342.
收稿日期:2021-12-02
作者簡介:于振(1993—),男,硕士,助教,研究方向:摄影测量。
3601500338257
