一种单相无刷电机的控制方法
2022-03-10
授权公告号:CN 109842330 B
授权公告日:2021.12.14
专利权人:南京德朔实业有限公司
发明人:王宏伟;李文成
近年来,随着永磁新材料、微电子技术、自动控制技术以及电力电子技术特别是大功率开关器件的发展,无刷电动机得到了长足的发展。单相无刷电机由于其相数最少,电气系统相对简单,所需驱动控制电路成本小,在电动工具、风机、吸尘器等领域得到较为广泛的应用。但是,因为其相对于三相无刷直流电机来说运行效率较低,市场上单相无刷直流电机的应用相对较少。在电机中,导通区间内,电机转子在旋转到某些特定位置时反电势达到最大值后反电势降低会引起电流尖峰,降低电机的整体性能。相同应用下,单相无刷电机较三相无刷电机相比,电枢反应更为严重,且反电势波形在导通区域后期急剧下降,这会引起极高的电流峰值,电流波形畸变严重,整机性能很差。
发明专利“一种单相无刷电机的控制方法”涉及电机控制技术领域,尤其涉及一种单相无刷电机的控制方法。
发明内容
发明提供一种单相无刷电机的控制方法,以降低单相无刷电机的电流尖峰,提高了单相无刷电机的整体性能,减小了电动工具电机的尺寸与对应的控制板的尺寸。第一方面,发明实施例提供了一种单相无刷电机的控制方法,单相无刷电机用于电动工具中,电动工具包括位置传感器、驱动电路和控制器;控制方法包括:在位置传感器输出的位置信号改变时,控制器关闭当前输出的控制信号,并滞后非导通角T 后,控制器触发输出目标控制信号至驱动电路,驱动电路根据目标控制信号驱动单相无刷电机。在位置信号由第一电平变化为第二电平时,控制器关闭输出第二控制信号,并滞后非导通角T 后,控制器触发输出第一控制信号至驱动电路;在位置信号由第二电平变化为第一电平时,控制器关闭输出第一控制信号,并滞后非导通角T 后,控制器触发输出第二控制信号至驱动电路。单相无刷电机的控制方法还包括:获取单相无刷电机的反电势波形;设置位置传感器的位置以使位置信号波形超前单相无刷电机的反电势波形。位置信号波形超前单相无刷电机的反电势波形的超前角的范围是20°~90°。非导通角T 的范围是20°~80°;单相无刷电机的导通角的范围是100°~160°。控制信号为PWM 信号;单相无刷电机的导通角包括平缓导通角和变化导通角;在平缓导通角内,控制器输出固定占空比的PWM 信号至驱动电路;在变化导通角内,控制器触发输出变化占空比的PWM 信号至驱动电路。在变化导通角内,控制器触发输出占空比由大到小变化的PWM 信号至驱动电路。平缓导通角内的PWM 信号的占空比大于变化导通角内的PWM 信号的占空比。平缓导通角和变化导通角以反电势波形的峰值对应的导通角为界限。该控制方法通过以位置传感器输出的位置信号的改变为指令,控制器关闭当前输出的控制信号,经非导通角T 后触发输出目标控制信号至驱动电路用于驱动单相无刷电机,以降低单相无刷电机的电流尖峰。提高了单相无刷电机的整体性能,减小了电动工具电机的尺寸与对应的控制板的尺寸。
实施方式:
图1 为一种单相无刷电机的控制方法的流程图,单相无刷电机可用于电动工具中,电动工具包括位置传感器、驱动电路和控制器;

图1
图2 为一种单相无刷电机的系统框图,参见图2,该电动工具可以包括单相无刷电机110、位置传感器120、控制器130 和驱动电路140。该控制方法具体包括:S110 在位置传感器120 输出的位置信号改变时,控制器130 关闭当前输出的控制信号;S120 滞后非导通角T 后,控制器130 触发输出目标控制信号至驱动电路140;S130 驱动电路140 根据目标控制信号驱动单相无刷电机110。电动工具主要分为金属切削电动工具、研磨电动工具、装配电动工具和铁道用电动工具。常见的电动工具有电钻、电动砂轮机、电动扳手和电动螺丝刀、电锤和冲击电钻、混凝土振动器、电刨等。位置传感器用于测量单相无刷电机的转子位置和转速,其安装方式有多种,例如安装在单相无刷电机的定子槽或齿内,或者是单独安装,单独安装一般做成印制板。

图2
图3 是一种单相无刷电机内部的结构示意图,如图3 所示,位置传感器101 安装在单相无刷电机110 的端部,用来检测气隙漏磁场。位置传感器通常可选用利用电流的磁效应进行工作的磁敏式霍尔位置传感器,它们在磁场作用下会产生霍尔电势,经整形、放大后即可输出电平信号,构成了位置信号。位置信号的改变时刻由单相无刷电机中转子的位置决定的。当位置传感器是开关型霍尔传感器,安装在定子槽内时。开关型霍尔传感器是一个双值元件。一个双值元件仅有“0”和“1”两种状态,两个双值元件便有四个状态,而n 个双值元件则可组成2^n 个状态。按照这样的规律,可以根据电动机的分配状态数确定所需霍尔传感器的最少个数。例如二相导通三相六状态的电机,在一个电周期内需要六个不同的状态,二个霍尔传感器产生不了六个状态,因而所对应需要的霍尔传感器的个数起码是三个。针对是单相电机,因此至少需要一个霍尔传感器。当单相无刷电机通电时的定子磁场中心线和永磁转子的磁场中心线重合时转矩为零。而二者成90°电角度时则转矩为最大,其变化规律呈正弦形。因位置传感器在单相无刷电机中起到检测转子位置的作用,因此应准确检测单相无刷电机的气隙漏磁场,因此位置传感器一般安装在单相无刷电机的端部。
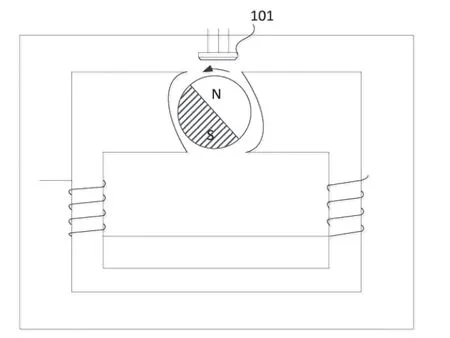
图3
位置传感器输出的位置信号输送到控制器,控制器130 输出一控制信号用于驱动单相无刷电机旋转。当位置信号没有改变时,控制器持续输出当前输出的控制信号至驱动电路,驱动单相无刷电机按照当前的旋转继续转动;当位置信号改变时,控制器关闭当前输出的控制信号,在滞后非导通角T 后触发输出目标控制信号至驱动电路,驱动单相无刷电机进行旋转,目标控制信号即作为该导通角内当前输出的控制信号。非导通角T 的大小可以根据单相无刷电机运行的需要进行选择。
图4 为一种单相无刷电机的反电势和位置信号时序关系的波形示意图,图5 为一种单相无刷电机的反电势、位置信号和控制信号的另一种时序关系的波形示意图,如图4 和图5 所示,波形1 表示单相无刷电机的反电势波形。波形2 表示控制器输出的控制信号,波形3 表示位置传感器输出的位置信号。可以看到,在位置信号改变时,控制器关闭当前输出的控制信号,也就上一阶段输出的控制信号。以位置信号改变时为起点,经非导通角T 后控制器开始输出目标控制信号,在非导通角T 内,如果控制器输出控制信号,单相无刷电机上产生的电流方向可能会和反电势波形的方向相反,引起单相无刷电机运行异常。而在位置信号改变后,延迟非导通角T,控制器才开始输出目标控制信号至驱动电路,防止单相无刷电机异常运行,提高单相无刷电机运行的可靠性。在导通角b 内,控制器输出控制信号,单相无刷电机旋转,产生反电势。在一些位置,反电势降低,反电势的降低引起了电流尖峰。设置非导通角T 后,单相无刷电机在非导通角T 期间不接收驱动电路的驱动信号,避免了电流尖峰降低单相无刷电机的整体性能,因此可以避免电流尖峰带来的降低单相无刷电机的整体性能的问题。另外,由于电动工具空间尺寸有限,对印刷电路板的制程(Printed Circuit Board Assembly,PCBA)的尺寸限制非常苛刻,采用单相无刷电机可以简化控制电路,降低PCBA 的尺寸。在上述技术方案的基础上,位置信号由第一电平变化为第二电平时,控制器关闭输出第二控制信号,并滞后非导通角T 后,控制器触发输出第一控制信号至驱动电路;在位置信号由第二电平变化为第一电平时,控制器关闭输出第一控制信号,并滞后非导通角T 后,控制器触发输出第二控制信号至驱动电路。位置信号的第一电平可以是高电平或低电平。当第一电平为高电平时,第二电平为低电平;当第一信号为低电平时,第二电平为高电平。此处可以用“0”表示低电平,用“1”表示高电平。位置信号一般为方波波形,位置信号由“0”变为“1”称之为上升沿,由“1”变为“0”称之为下降沿。假设第一电平为高电平,第二电平为低电平。位置信号发生变化时,当位置信号处于上升沿时,控制器关闭第二电平对应的第二控制信号的输出并进行计时,当经过非导通角T 后,控制器触发输出第一电平对应的第一控制信号至驱动电路,驱动单相无刷电机;当位置信号处于下降沿时,控制器关闭第一电平对应的第一控制信号的输出并进行计时,当经过非导通角T 后,控制器触发输出第二电平对应的第二控制信号至驱动电路,驱动单相无刷电机。第一电平也可以是低电平,第二电平为高电平,此时的过程与上述类似,此处不再赘述。
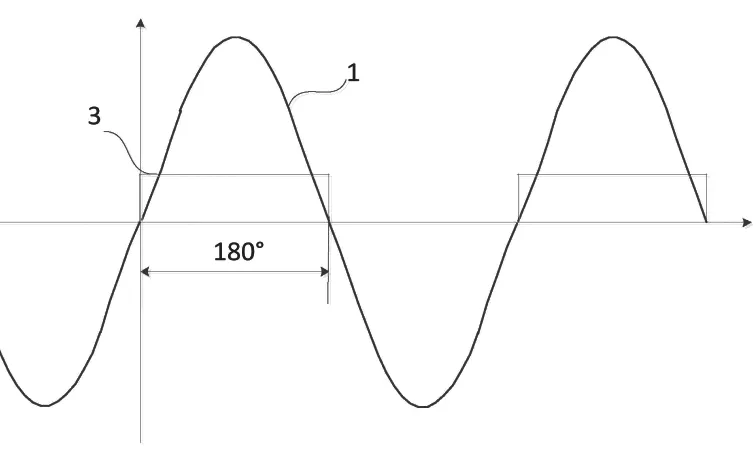
图4
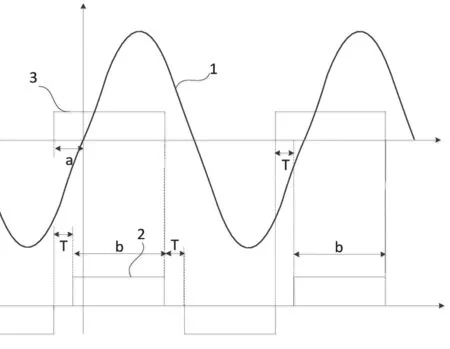
图5
图6 为另一种单相无刷电机的控制方法的流程图,该控制方法包括:S610 获取单相无刷电机110 的反电势波形;例如,通过外部驱动部件驱动单相无刷电机110 旋转,然后测量获得单相无刷电机110 的反电势波形以及位置传感器120 输出的位置信号波形。S620设置位置传感器120的位置以使位置信号波形超前单相无刷电机110的反电势波形。继续参考图5,通过设置位置传感器120 的位置,使位置信号波形超前单相无刷电机110 的反电势波形的a 角度。由于在反电势波形的后期,反电势逐渐降低,单相无刷电机110 的电流变大,会出现电流尖峰。位置信号波形超前单相无刷电机110 的反电势波形的角度a,相当于将位置信号的波形前移,则在整个导通区间内,也即导通角b 内,反电势不会有明显降低,可有效抑制导通区间内,反电势降低引起电流尖峰。位置信号波形超前单相无刷电机110 的反电势波形,在位置信号改变时,如果控制器130 输出控制信号至驱动电路140,驱动电路140 驱动单相无刷电机110。由于此时反电势波形比较低,也可能会出现较大的电流峰值,而此时控制器130 关闭输出的控制信号,滞后非导通角T 后,控制器130 才触发输出控制信号至驱动电路140 而驱动单相无刷电机110,可以降低位置信号波形超前单相无刷电机100 的反电势波形引起过大的电流峰值。S630 在位置传感器120 输出的位置信号改变时,控制器130 关闭当前输出的控制信号。S640 滞后非导通角T后,控制器130 触发输出目标控制信号至驱动电路140。S650 驱动电路140 根据目标控制信号驱动单相无刷电机110。
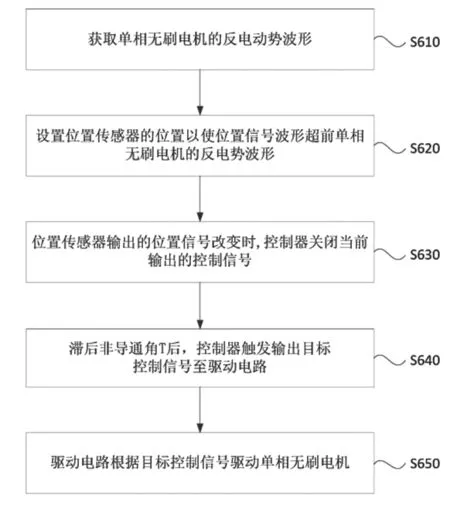
图6
图7 为一种单相无刷电机的相电压、位置信号和电流的模拟波形示意图,图8 为另一种单相无刷电机的相电压、位置信号和电流的模拟波形示意图。图7 中的位置信号和反电势波形相对应,图8 中的位置信号超前反电势。如图7 所示,波形3 表示位置信号的波形,当位置传感器输出的位置信号与单相无刷电机产生的反电势波形对应,位置信号没有超前反电势时(可参考图4),反电势降低引起很大的电流尖峰,造成单相无刷电机的性能下降,反电势降低越快,电流尖峰越高。如图8 所示,波形3 表示位置信号的波形,位置信号的波形超前单相无刷电机的反电势波形时(可参考图5),此时使得反电势降为零之前进行控制信号的转变,可以避开反电势下降最快的部分,即可以避免高电流尖峰的产生,如图8 中的电流尖峰的电流值大大低于图7 中的电流尖峰的电流值其中波形3 表示位置信号的波形,波形4 表示电流波形,波形5 表示无刷电机的相电压波形。
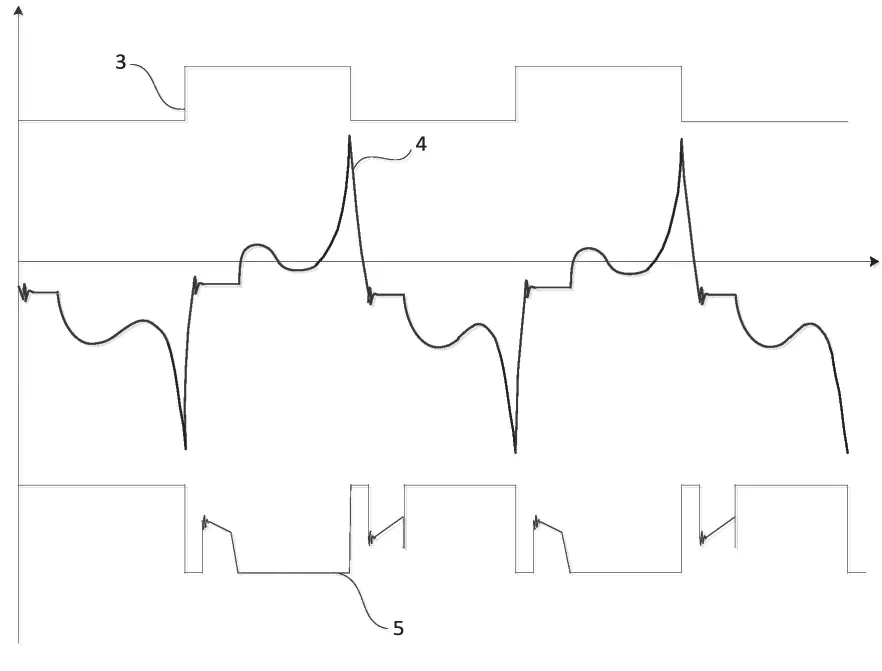
图7

图8
图9 和图10 分别为单相无刷电机的另两种电压、位置信号和电流的模拟波形示意图,图9 和图10 所对应的控制信号的非导通角不同,其中,图9 所对应的控制信号的非导通角T 大于图10 所对应的控制信号的非导通角T。比较图9 和图10 中的电流的波形图,可以看到图9 中电流峰值小于图10 中电流的峰值。而且,图10 中电流的波形的电流值小于图8 中位置信号超前反电势时对应的电流的峰值。因此,当增加非导通角T 的取值时,可以降低电流尖峰的电流值,并且可以抑制超前角引起的电流峰值。另外,当非导通角T 增大时,单相无刷电机的转速降低,如图9 和图10 所示,图9中的单相无刷电机的转速低于图10 中单相无刷电机的转速,因此,在实际应用中,非导通角T 的取值根据实际情况进行调节。

图9
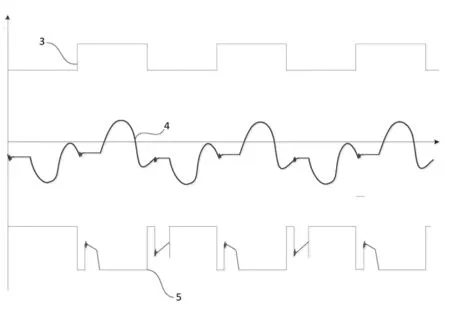
图10
技术方案通过设置位置传感器的位置使位置信号超前反电势波形,可以降低单相无刷电机的电流尖峰。提高了单相无刷电机的整体性能。在此基础上增加非导通角,可以进一步的降低单相无刷电机的电流尖峰,增加非导通角还可以抑制超前角引起的电流峰值,进一步的提高了单相无刷电机的整体性能。在上述方案基础上,位置信号波形超前单相无刷电机的反电势波形的超前角的范围是20°~90°。如图5 所示,位置信号波形超前单相无刷电机的反电势波形的超前角a 的范围是20°~90°。当超前角很小时,位置信号末端对应的反电势下降的斜率仍然很大,因此反电势降低引起的电流尖峰仍然很大,造成单相无刷电机的性能下降;当超前角为90°时,位置信号的末端对应反电势的峰值,反电势最大,此时不会产生很大的电流;当超前角大于90°时,反电势相对较低,也会引起电流尖峰。因此位置信号波形超前单相 无刷电机的反电势波形的超前角a 的范围是20°~90°时,可有效降低单相无刷电机的的电流尖峰。在上述基础上,非导通角T 的范围是20°~80°。非导通角T 和导通角b 之和为反电势的半个周期180°,因此单相无刷电机的导通角b的范围是100°~160°。非导通角T 设置在超前角a 的范围内,可以避开反电势降低引起的电流尖峰。设置非导通角T的范围是20°~80°,使非导通角T 超前反电势波形合适的角度,可以使单相无刷电机快速响应到给定转速,当非导通角T 不超前反电势波形时,单相无刷电机达到的转速与给定转速存在差距,影响单相无刷电机的运行性能。因此设置非导通角T 的范围是20°~ 80°,超前反电势过零点一定角度,避免影响单相无刷电机的运行性能。
图11 是一种单相无刷电机的相电压、位置信号和电流的波形示意图,图12 为一种控制信号是PWM 信号的电流波形示意图,波形4 表示电流的波形,波形2 表示控制信号的波形,在上述基础上,控制信号为PWM 信号;单相无刷电机的导通角b 包括平缓导通角c 和变化导通角d;在平缓导通角c 内,控制器输出固定占空比的PWM 信号至驱动电路;在变化导通d 内,控制器触发输出变化占空比的PWM 信号至驱动电路。如图12 所示,导通角b 分为平缓导通角c 和变化导通角d,平缓导通角c 在变化导通角d 的前端。平缓导通角c 对应的反电势波形没有下降,电流波形比较平缓,因此平缓导通角c 对应的PWM 信号的占空比不变即可使得到的电流波形比较平缓;变化导通角d 对应的反电势急剧下降,而且在相同应用下,单相无刷电机较三相无刷电机相比,电枢反应更为严重,因此电流波形比较陡峭,存在电流尖峰,因此变化导通角d 对应的PWM 信号的占空比根据电流波形改变而改变,使得到的电流波形比较平缓,抑制了电流峰值,提升整机的整体性能及效率。
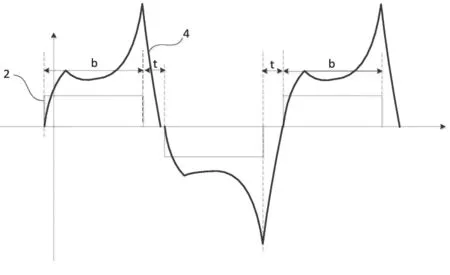
图11
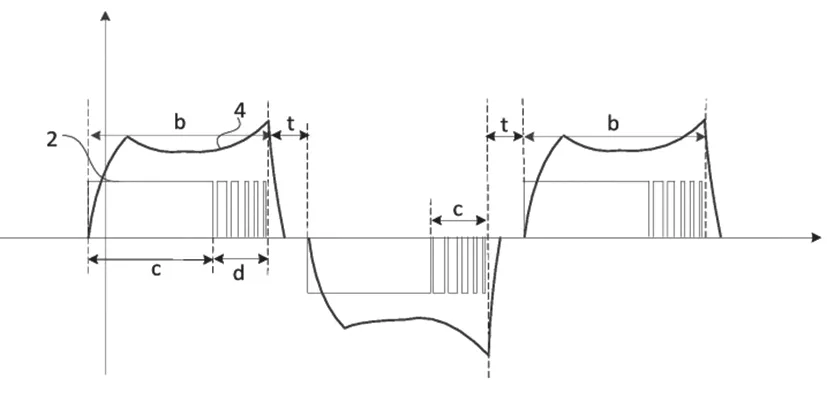
图12
技术方案,通过控制信号采用PWM 信号,并在导通角范围内,使平缓导通角范围内对应的PWM 信号的占空比不变,变化导通角范围内对应的PWM 信号的占空比根据 电流波形改变,可以得到比较平缓的电流波形,抑制了电流峰值,提升整机的整体性能及效率。在上述技术方案的基础上,在变化导通角d 内,控制器触发输出占空比由大到小变化的PWM信号至驱动电路。参考图11,在导通角b 后期,反电势波形急剧下降,电流波形急剧上升。在变化导通角d 范围内,电流波形单调上升。当控制信号的占空比不变时,控制信号驱动单相无刷电机转动的转速不变,因此产生的反电势呈正弦波。在导通角后期急剧下降,引起很高的电流尖峰。参考图12,采用控制器输出PWM 信号时,PWM 信号的占空比越小,在输入电压相同时,其驱动单相无刷电机运动产生的转速越小,产生的反电势越低,因此反电势降低时引起的电流尖峰就越小。因此在变化导通角d 内,控制器触发输出占空比由大到小变化的PWM 信号至驱动电路,较高的电流尖峰对应的PWM 信号的占空比小,比控制信号的占空比不变时对应的电流尖峰的值削弱的多,最终可以平缓整个电流波形。
图13 是单相无刷电机输入功率为400W 时的电流模拟波形示意图,图14 是单相无刷电机输入功率为1000W 时加入PWM 控制信号后的电流模拟波形示意图。由图13 可知,在导通角内,控制器输出端的PWM 信号的占空比不变,电流峰值达到60A,波形畸变严重,整机性能很差。当单相无刷电机输入功率增大时,单相无刷电机转速增加,反电势畸变,引起更大的电流尖峰。当单相无刷电机输入功率为1000W 时,如果整个导通角内,控制器输出的PWM 信号的占空比不变时,电流尖峰在60A 以上,而在导通角的末尾阶段(变化导通角),控制器输出的PWM 信号的占空比可变,如图14 所示,电流峰值约为48A,有效抑制了电流尖峰。在上述方案基础上,平缓导通角c 内的PWM 信号的占空比大于变化导通角d 内的PWM 信号的占空比。继续参考图11,如图11 所示,变化导通角d 内的电流值在平缓导通角c 内的电流值的基础上单调上升,因此平缓导通角c 内的电流值小于变化导通角d 内的电流值。为了得到的电流波形平缓,因此平缓导通角c 内的PWM 信号的占空比大于变化导通角d 内的PWM 信号的占空比,使得在平缓导通角c 内电流值较小的情况下通过PWM 信号占空比的调节能输出的电流值与变化导通角d 内的电流值近似,如图12 所示,使电流波形比较平缓,提升整机的整体性能及效率。在图12 中,平缓导通角c 的占空比为100%,可以在相同输入电压的情况下使单相无刷电机的转速达到最大值。需要说明的是,根据实际需要,平缓导通角c 的占空比可以低于100%。在上述方案的基础上,平缓导通角c和变化导通角d 以反电势波形的峰值对应的导通角为界限。从过零点至反电势波形的峰值,反电势呈上升状态,因此电流波形比较平缓,对应的导通角b 为平缓导通角c;反电势波形的峰值之后,反电势呈快速下降状态,会引起很高的电流尖峰,因此对应的导通角b 为变化导通角d。

图13
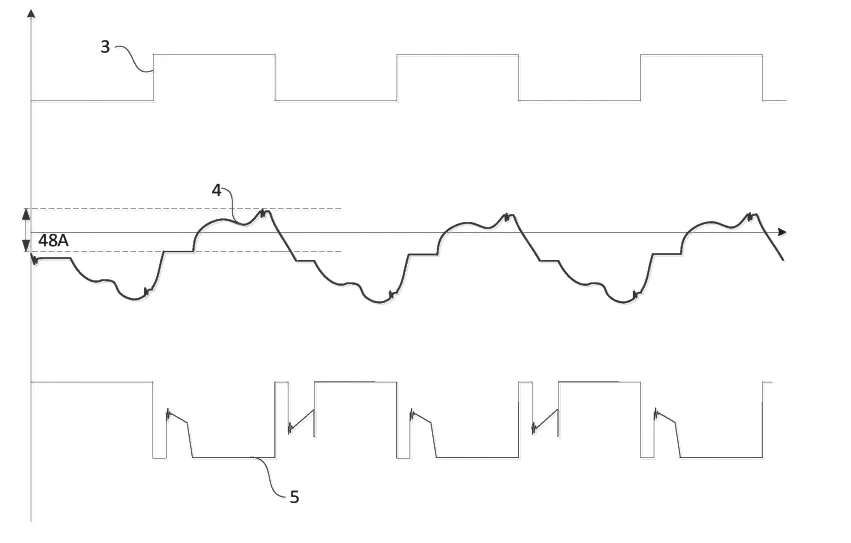
图14
图15 为一种单相无刷电机的系统框图,在上述各例的基础上,提供了一种优选实例,如图15 所示,交流电通过EMI 元件和整流桥后转换为直流电,直流电输入驱动电源,驱动电源输出相应电源电压至驱动电路和控制器电源输入端,为驱动电路和控制器供电,驱动模块可包括驱动模块和功率模块。控制器可以优选为微型CPU,例如单片机。单相无刷电机中的位置传感器检测位置信号发送到控制器,控制器接收外部输入的对单相无刷电机的控制指令,例如调速信号,结合位置信号和对功率模块采样的电流、温度等信息进行计算形成控制信号发送到驱动模块,驱动模块根据控制信号对功率模块中的晶体管进行导通/关断,驱动单相无刷电机旋转。该单相无刷电机的系统可执行发明专利中任意实施例提供的单相无刷电机的控制方法。
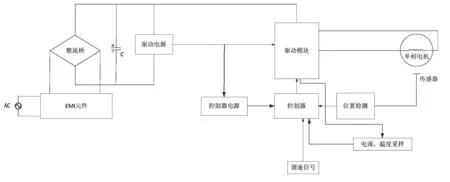
图15
发明专利“一种单相无刷电机的控制方法”还可以有其它实施方式,凡采用等同替换或等效变换形成的技术方案,均落在其要求保护的范围之内。
