基于改进式RRT*的手术机器人在线避障运动规划
2022-03-10胡孟慧王怀震梁凤强孟超
胡孟慧,王怀震,梁凤强,孟超
(1.山东大学 临床医学院,山东 济南 250011;2.山东新一代信息产业技术研究院有限公司,山东 济南 250011;3.临沂供电公司,山东 临沂 276003;4.临沂正信工程勘察设计有限公司,山东 临沂 276005 )
0 引言
运动规划是机器人研究的基本问题,针对移动机器人的路径规划方法已经非常丰富,目前该类方法主要有Dijkstra 算法、A*算法、随机采样法(PRM)、快速随机搜索树(RRT)、人工势场法、智能算法等。但是,针对机械臂的多输入多输出、非线性、强耦合的高维复杂系统,上述方法很难得到应用。为保证机械臂安全工作,应该满足其在线避障要求。因此,机械臂在线避障运动规划是机械臂控制的一个关键问题。
为了将移动机器人路径规划方法应用到机械臂系统上,学者们对这些规划方法提出了相应改进。祁若龙等[1]对理想轨迹进行分段描述,将空间机械臂轨迹规划问题转变为多目标优化求解问题,建立适应度评价函数,用遗传算法进行求解。理论上该算法可以推广到任意自由度和任意多的障碍物,但是参数量增加导致计算成本增加,计算时间也随之成倍增长。杜爽等[2]使用双向RRT 算法的规划方法,得到仿人机器人双腿稳定位形和抓手位姿序列,实现了机器人的全身运动规划。杨一波等[3]对人工势场法进行了改进,对障碍物建立排斥势场,对目标建立引力势场,针对其容易陷入局部极小点的问题,引入了与目标点相关的因子,能够避开障碍物到达目标点。刘成菊等[4]对RRT进行了改进,引入了引力场的概念,使得随机树的生长向终点偏移,引入路径缓存方法和动态扩展随机树的方法,适合于移动障碍物环境中。贾庆轩等[5]利用运动学方法将空间障碍物转换到了关节空间,再根据连杆与障碍物的碰撞条件,确定出了机械臂的自由运动空间,利用A*算法在自由运动空间进行路径搜索,实现了无碰撞路径规划。何兆楚等[6]将RRT 和人工势场法结合起来,利用人工势场法进行局部路径规划,一旦陷入局部极小值,就使用RRT 选择临时目标点,使其跳出局部最小值,能够实现避障,最终到达目标点,但其只考虑了机械臂末端的避障,未曾考虑机械臂杆件的避障。这些改进方法都是开环的,不能应对动态环境,国外有学者关于实时避障做了一些研究[7-8],可以适应于动态环境,但其主要针对的是移动机器人,关于机械臂实时或在线避障的内容较少。
本文对RRT*进行改进并应用到机械臂空间,根据目标位置变化更新搜索路径形成闭环,实现在线避障运动规划。
1 机械臂在线避障运动规划
在学者们改进的基础上,结合机械臂系统高维度的特点,本文对RRT*算法进行了改进使其适用于机械臂在线避障运动规划。为降低运动学逆解所带来的时间损耗,机械臂运动规划一般在关节空间内进行。而目标点通常是基于笛卡尔空间的,通过逆解转换到关节空间。
在线避障运动规划包括两个阶段:预规划和重规划。预规划阶段从起始点开始搜索,同时将搜索到的路径点送至机械臂控制器,直至搜索到目标点进入重规划阶段。重规划阶段在包含目标节点的路径节点附近采样以优化路径,利用摄像机或其它设备监控目标点,当目标点发生移动时,以当前机械臂位置作为起始点重新规划,实现闭环控制,直至机械臂移动到目标节点。
1.1 预规划
预规划的主要任务是对整个自由空间进行探索,使得节点布满解空间,同时找到目标点。Algorithm1 给出了预规划的伪代码,此算法在RRT*的基础上做了改进。在此过程中,机械臂始终处于运动状态,当机械臂qa运动至与根节点q0之间的距离小于设定阈值时,从规划的路径中选取前k个节点输入给机械臂控制器(17 行),控制机械臂按照这k个节点进行运动,将根节点q0更新为(14—16 行),保证了在线运动。

Algorithm2 给出了规划包含k个节点路径的伪代码。算法使用成本函数式(1)选择节点,当路径规划进行到叶节点时,标记该节点并返回规划路径(3—5 行)。

其中,cost(qi)为起始点到qi的成本,H(qi)为qi到目标点的成本,计算方法如式(2)所示。当qi标记时,表明qi已经访问过,当通过重新布线或添加新节点将未标记节点添加为其子节点时,其祖先节点都有机会再次访问,即所有祖先节点去除标记。当规划路径比最佳路径更接近目标点时,则更新最佳路径(6 行)。


1.1.1qrand的选取和qnew的计算
qrand采用带有目标偏向的随机采样,如式(3)所示,qnew计算方式如式(4)所示。该方法以概率α向目标点方向采样,概率1—α在自由空间内随机采样,利于搜索树向未知空间探索,又保证朝目标点进行搜索,兼顾了随机性和搜索目标的快速性[9]。α的设置根据障碍物确定,当障碍物较少时,α设为较大值,障碍物较多时,α设为较小值。

其中,Pr∈[0,1]是一个随机数,α为自定义常数,qrand=[θ1,θ2,...,θ6]为关节空间内6 个关节角组成的点。

1.1.2 成本计算
路径的总成本为节点之间的距离总和,一般用欧式距离来定义[10]。关节空间的欧式距离定义为式(5),笛卡尔空间位置和姿态的欧式距离定义为式(6)和式(7),r,p,y分别为绕z,y,x轴的转角。

对机械臂来讲,两组相差较小的关节角对应的末端位姿可能相差甚远,另外由于逆解的多解性,两组完全不同的关节角对应的末端位姿也可能完全一致,因此可用三者的加权值来定义距离成本,如式(8)所示。

1.2 重规划
由于目标位置的变化可能会导致规划好的路径不再适用,所以需要对路径进行重新搜索和优化[11]。Algorithm3 给出了重规划的伪代码描述。4—5 行在路径周围进行采样和重新布线,如果找到更优的路径则更新path(6 行)。7—10 行与Algorithm1 对应代码作用相同。当目标点移动导致选择的目标点与障碍物发生碰撞时,需重新选择目标点(11—12 行),以机械臂当前点作为起始点重新规划,形成闭环在线控制,直至机械臂到达目标点。

1.2.1 扩展与重新布线
RRT*-smart[12]在二维空间扩展与重新布线示意图如图1 所示,对比二维空间,机械臂空间也有类似的性质。扩展采样方式如式(9)所示,该方法以概率α在以信标qbeacon为圆心,r为半径的圆内随机采样(左图),概率1—α在自由空间内随机采样。信标qbeacon是路径的节点,包含路径的“拐点”信息,因此在信标周围采样能优化这些“拐弯”处的路径。右图展示了如何重新布线优化路径,根据三角形定理“两边之和大于第三边”可知去掉中间点会使得成本更小,据此对整条路径重新布线以优化路径。


图1 扩展与重新布线
1.2.2 查找临近点
预规划阶段对全局进行搜索,存储了大量的节点,优化路径时需要进行查找,查找速度决定算法的运行速度,因此需要合适的存储结构减少查找时间。本文使用KD 树[13](k-dimension tree)存储节点,KD 树是一种对K 维空间中的实例进行存储以便对其进行快速检索的数据结构。
算法在执行过程中不断扩展节点,将这些节点按照“左小右大”的原则动态添加进树中。在查找近邻点时,从根节点出发,递归地向下遍历,当目标点当前维小于切分点的坐标值时,移动到左子树,否则移动到右子节点,直到叶节点为止。KD 树的引入将查找的时间复杂度从O(N)降低到了O(logN)。
2 仿真实验
为了验证本文提出的算法,利用MATLAB在三维空间内进行两组测试。设置7 个障碍物模型,初始点为{10,10,10},目标点为{90,90,90},步长为5,最大迭代次数为2 000。最后在实际机械臂上对算法进行了验证。运动平台选用的计算机主频为2.3 GHz,内存为8 GB。
2.1 算法对比
针对规划速度而言,RRT 系列算法的速度远高于其它规划算法,因此本文与RRT 系列算法进行对比。在初始点、目标点、障碍物等变量相同的条件下,分别对RRT、RRT*和Algorithm1 进行了10 次对比,对比结果见表1,迭代次数、运行时间和路径长度取成功平均值。

表1 算法性能比对
可以看出,针对7 个障碍物的复杂环境,三种算法都有着较高的成功率。RRT*由于对父节点的选择做了改进,路径长度小于RRT,但运行时间较长,迭代次数更多。Algorithm1在RRT*的基础上改进采样方式,同时将前k个节点送给机械臂控制器,使其路径长度更短,成功率更高,迭代次数也最短,而运行时间与RRT 相比变化不大。
三种算法搜索结果如图2 所示,可以看出,RRT 搜索轨迹不够光滑,RRT*的搜索点几乎布满了整个空间,很多都是没必要的,Algorithm1 以概率α向目标点进行搜索,轨迹较为光滑,同时在自由空间也有一些搜索点,便于重规划进行扩展和重新布线。

图2 三种算法搜索结果比较
2.2 规划对比
预规划与重规划的对比如图3 所示,左图是预规划给出的路径,对中间障碍物进行膨胀操作后与规划路径发生冲突,此时重规划以当前机械臂位置为起点重新规划后面的路径,如右图所示,依然可以顺利完成避障。表明该算法在环境发生变化时,能够在线重新规划后面的路径,适应动态环境以完成避障任务。
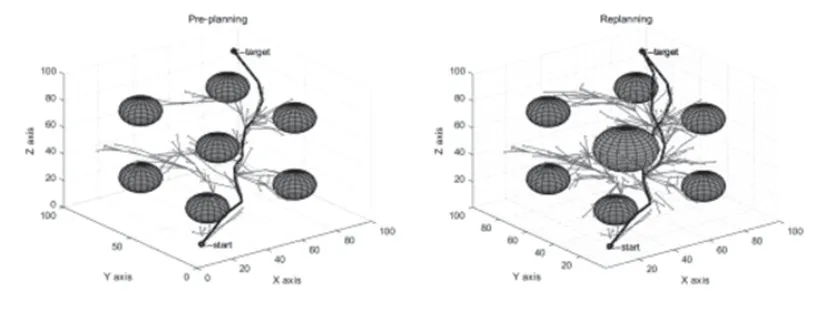
图3 规划对比
2.3 实物模拟
根据本文提出的算法,利用ROS(Robot Operating System)中的运动规划库MoveIt!控制Jaco2 机械臂进行避障运动规划验证。实际环境下避障过程如图4 所示。图4 中长方体纸箱为障碍物,黄色方块位置为起始点,将其移动至障碍物的另一侧,在规划的同时,将得到的路径点送至机械臂控制器,实现在线规划任务。图中可见本文算法能够完成避障任务,验证了仿真结果。

图4 实际环境下避障过程
3 结语
本文从机械臂的作业需求出发,提出了一种在线避障规划算法。规划算法分为两阶段:预规划和重规划。
预规划阶段,在关节空间内以概率α向目标点搜索,对节点进行碰撞检测以确定是否添加进搜索树中,同时将规划出的前k个节点送给机械臂控制器,实现规划与运动并发进行。
重规划阶段,在路径点附近采样,对之前生成的路径进行“剪枝”和“重连接”操作,优化路径,减少成本。当目标节点移动时,以机械臂当前位置为起始点重新规划路径,能够实现动态避障和跟随目标。
在仿真环境中添加了7 个障碍物进行了算法验证,证明该算法能够在复杂环境中规划出一条避障路径,当环境变化导致规划路径不可行时,算法能及时调整路径以适应新的环境,满足机械臂在线避障要求。
