CW20无人机在明光市涧溪镇1:1000正射影像图制作中的应用分析
2022-03-10年四磊安徽省第一测绘院安徽合肥230000
年四磊 (安徽省第一测绘院,安徽 合肥 230000)
1 引言
涧溪镇地处安徽省明光市东部,总面积164.4km²,人口4.5万,为皖东重镇。涧溪镇历史悠久,《嘉山地名录》载:“因地处环山之中,有一小河流经,故名。”东与江苏省盱眙县接壤,为周边两省三县数十个乡镇商品集散地,素有“小南京”之称,现已编入南京都市圈地名册。涧溪山川秀美,拥有“白色黄金”之称的凹凸棒粘土,其产品广泛应用于冶金、石化、日化、医药等行业。
因CW-20垂直起降无人机具有受场地限制较小、小型轻便等优势,在任务比较紧急的情况下,我们采用了CW-20垂直起降无人机航空摄影系统,对明光市涧溪镇约61km²进行制作1:1000正射影像图。本次航拍的范围,南北长约10.66km,东西宽约5.75km,总面积约61km²,测区内有309省道,交通较为便利。
2 无人机航空摄影
2.1 无人机航摄系统的选择
本项目采用了CW-20垂直起降无人机(如图1)、4200万像素的索尼α 7RII相机和零度飞控软件组成无人机航摄系统,该系统集成了GNSS、空气速度计、差分GPS、气压计等多种传感器。

图1 CW-20无人机
2.2 测区航线的生成
选择比较适合航摄的天气,直接进入测区内,选择一个相对开阔的垂直起降的场地。首先,架设飞机导入测区的范围线KML格式的红线,保证实际飞行时摄区覆盖范围满足要求。按照航向70%和旁向均不低于55%的重叠度进行设计,具体航摄技术参数详见表1。
其次,按导入的航拍区域,生成对应的航线(如图2航线布设示意图)。本次航飞设置比例尺为1:1000,会自动生成对应的航线,总航程共305.7km,共分了2个架次来飞。最后,进行航飞获取数据[3]。
图2 航线布设示意图
2.3 影像数据获取
CW-20无人机航空摄影系统采用垂直自动起降,在CW-20飞行过程中系统采用的是飞机自动导航系统,地面站监控员通过地面站可以实时监测CW-20的状态信息,实时掌握CW-20的位置、姿态、电量、信号强度、风速以及各种警告信息等情况。将设置好的索尼α7RII相机放入机舱内,数码相机可以定点曝光,利用架设好的RTK基站,自动获取影像和姿态数据,确保不同架次、不同时段所摄航片影像校色准确、色彩均匀、相同地物的色彩一致。飞行结束后,下载2个架次的POS和拷贝对应的照片,并整理好差分的POS以供内业处理。
2.4 像控点测量
本项目的像控点采用CORS-RTK方法进行测量,每公里大约2个像控点。像控点严格按照规范来布设,并且所测像控点的点位中误差均满足本项目1:1000正射影像图制作的需要,侧区内共打了32个像控点。
3 正射影像图(DOM)制作
利用pixelgrid UAV系统处理无人机影像图的主要过程:资料准备、野外像控点测量、畸变差校正,空三自动加密、DEM制作、影像匀色、镶嵌成图、DOM输出。利用PixelGrid UAV系统处理无人机影像数据的流程:原始影像→畸变差校正→控制资料→控三加密→DEM制作→DOM制作→DOM成果。
3.1 数据预处理
收集新飞行的数据,每张像片的原始资料均包括POS数据、影像数据、相机文件以及像控点数据。每张像片的POS数据均包括像片号、纬度、经度、大地高、航高、航向方位角、航向倾角、旁向倾角等信息。主要检查航带转弯处的相片号,让POS数据中的相片号与影像数据相片号一一对应。
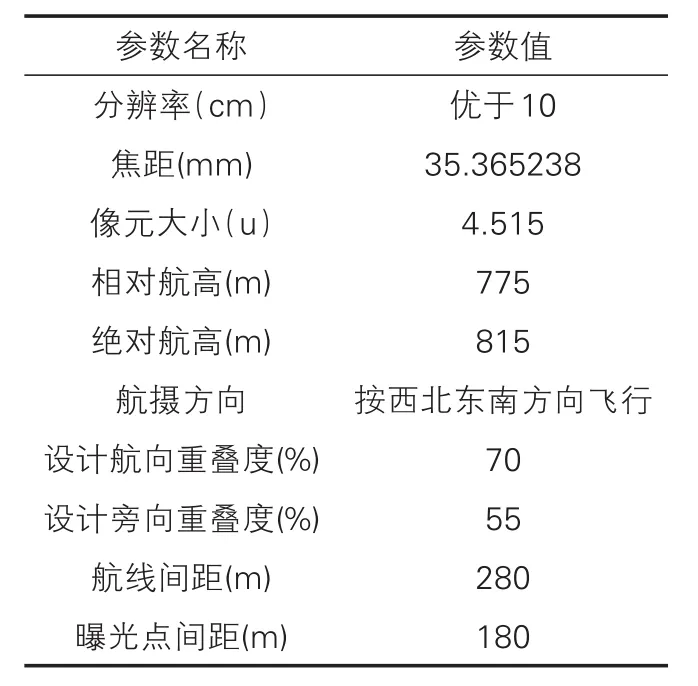
航摄设计技术参数表 表1
检查点检查情况表 表2
3.2 DOM生产
①数据准备。利用pixelgrid软件收集准备无人机参数和相机资料。其中包括原始影像数据和相机检校参数、POS数据、控制点数据、航线图(包括航线索引图、飞行方向、飞行架次等)等。
②畸变差校正。由于无人机航拍的照片,畸变差较大,其像片存在边缘畸变,需对其进行畸变差校正后才能进行加密。利用相机检校参数,用PixelGrid UAV软件对无人机航片进行主点及畸变差校正,生成无主点偏移及畸变的影像。
③空三加密。首先,建立工程文件,根据航线,对做好畸变差校正的航片,进行影像自动内定向,确定航带初始点偏移量,进行全测区自动匹配,剔除多余的粗差大的像点,然后进行连接点的交互编辑,转刺控制点,进行区域平差解算,完成空三加密,输出空成果[4]。
④DEM制作。空三加密完成后,进行DSM匹配、编辑及滤波处理(目的是去除所有建筑物与植被)。
⑤DOM制作。对影像进行正射纠正前,需对影像进行匀光、匀色处理,才能保证最终D0M成果的色调一致。系统可选择多种方法进行匀光处理,有自适应模板法、频率域匀光法、小波低通滤波法等。匀光处理后还要进行匀色处理,才能实现色彩统一。匀色方法有:均值方差匹配法;直方图匹配法;测区全局匹配法。可选择其中一种匀色方法进行匀色。正射影像采用单机多核进行正射纠正处理,用测区大DEM对单片航片进行纠正。最后,对单片D0M进行拼接及裁切输出。在进行拼接时,系统可自动生成拼接线,并对拼接线进行修改,以达到最好的拼接效果,DOM成果如图3所示[2]。

图3 DOM成果示意图
4 DOM成果质量检查
4.1 DOM地物点检查
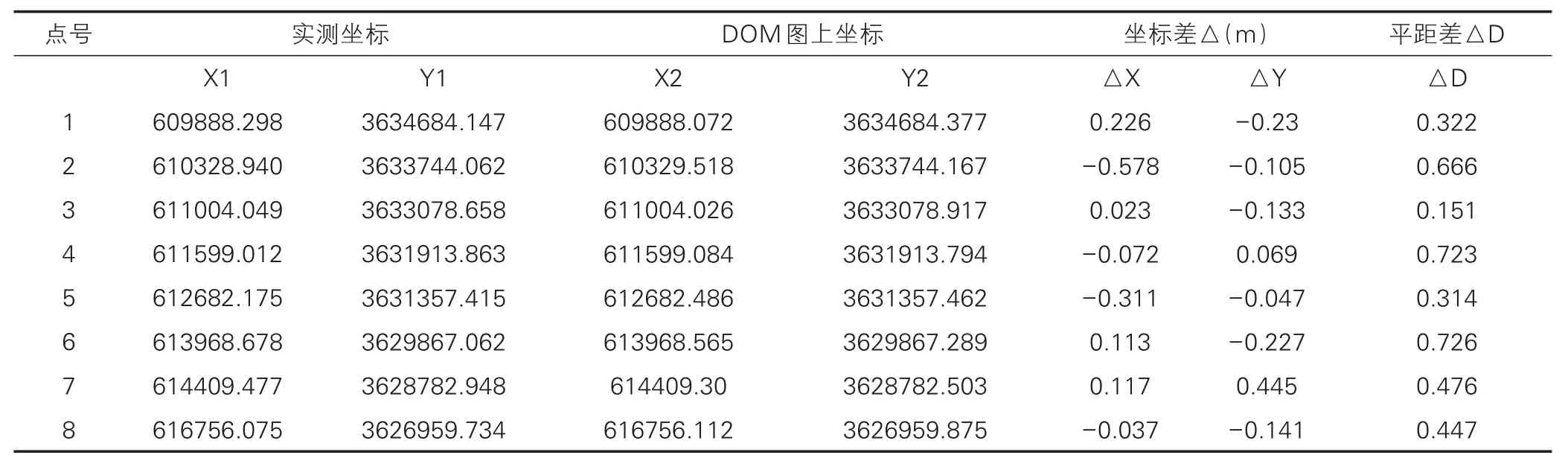
为了验证本项目DOM精度,还利用RTK在整个测区随机施测了8个地物进行检查,检查的详细情况见表2。
像控点中误差计算:
4.2 飞行质量检查
通过对本项目的飞行质量逐项进行检查,质检人员的最终评价为航摄仪和航摄比例尺选择正确,航摄分区合理,航线敷设方法正确,航摄时间选择合理。像片航向和旁向重叠度、像片倾斜角、像片旋偏角、航线弯曲度、航高保持、边界覆盖保证、漏洞补摄、飞行记录填写均符合规范要求。
4.3 影像质量检查
通过质检人员对所有影像进行了认真仔细的分析,最终评价为该项目的整体影像清晰,层次丰富,色彩反差适中、色调柔和,无阴影和云影,未出现大面积反光和污点,拼接影像无明显模糊、重影和错位现象,影像质量符合规范要求。
5 影响正射影像图(DOM)制作的几个关键因素
影响正射影像图(DOM)制作的几个关键因素:一是像控点精度,影响DOM制作精度最重要的就是像控点精度,因此像控点的选择、野外测量的精度、控制点刺点的精度等非常重要;二是DEM的精度,DEM是制作DOM的基础,DEM的精度也相当关键;三是无人机空中飞行的质量,包括无人机飞行姿态、重叠度、旋偏角、曝光瞬间相机在空间的姿态等;四是无人机航飞的原始影像质量,包括影像清晰度,色彩反差、阴影、云影、反光等;五是后处理软件的算法及功能情况等。
6 结语
本项目是CW-20无人机首次在地方利用无人机航摄技术制作1:1000大比例尺正射影像图,具有灵活机动、经济高效、使用成本低、维护操作简单、能完成有人驾驶飞机不宜执行的多种任务等技术特点,且DOM具有精度高、信息丰富、直观真实等诸多优点,相信随着计算机技术和航摄技术的发展,利用CW-20无人机航测技术制作大比例尺数字正射影像图将会得到更加广泛的应用。
