全站型扫描仪在工程施工中的应用
2022-03-10储巨球董海英郝国宇朱善美
储巨球 ,董海英,郝国宇,朱善美
(1.中铁四局集团第四工程有限公司,安徽 合肥 230041;2.安庆市水利局,安徽 安庆 246000)
1 引言
随着我国基建实力的不断提升,隧道桥梁等工程建设也得到了高速发展,而隧道断面测量作为隧道施工控制必不可少的重要环节其测量技术也需要不断的发展、进步。隧道结构横断面测量,是验证土建施工后限界尺寸和有效净空能否满足设计要求所进行的测量工作,其测量精度要求高、施测密度大[1]。传统的横断面测量方法一般采用支距法、全站仪解析法、断面仪法等,虽然施测方法多种多样,但都有其自身的缺点和局限性,很难确切地反映所测量断面的真实情况,进而为后期隧道的调线调坡工作提供准确的基础数据[1]。
传统的三维数据可以通过单点采集与面采集两种方法获取:利用逐点采集的方法称为单点采集,但此方法采集速度慢,在地形复杂的情况下存在采点困难、效率低等缺点,如利用经纬仪、全站仪、GPS等仪器获取目标点的三维信息;通过对摄影测量、遥感获取的影像数据处理从而得到三维数据的方法被称为面采集,但该方法存在影像质量要求高,数据处理难度大、耗时长等问题。
全站型扫描仪集成了多项先进的测量技术,是近年来一项重要的技术革新,相对于传统扫描仪,虽然它采集点云的频率较低,但拥有更高的精度,再加上其综合了全站仪测量模式,具有设站的功能[2]。在点云数据拼接方面更高效,精度更高,具有广泛的应用空间[3]。

扫描仪选型 表1
2 工程概况
昌景黄铁路安徽段站前一标二分部位于黄山市休宁县境内,土建里程DK9+662.02~DK18+060,全长8.39km。本分部主要工程有3.5座隧道,5座桥梁,5段路基。隧道总长6.6km,其中,新塘隧道长225.2m,茄塘隧道长849.97m,东山隧道长3489.44m,云头山隧道长2052.91m,占线路总长79%;桥梁总长1.35km,其中,休宁河特大桥长715.3m;茄塘大桥长266.93m,元溪大桥长189.37m,井季中桥103.29m,酸梅树中桥70.65m,占线路总长16%;路基总长0.43km,占线路总长5.1%。
3 全站型扫描仪的比选
综合比选,在相同精度及工作任务的条件下,选用Trimble SX10仪器可以更快速地完成外业测量工作,并且其内业数据处理软件单一,免去数据在不同软件中导入导出时格式转换的繁琐,也保证数据在处理过程中不存在数据丢失的情况。因此,本项目点云采集设备最终选用Trimble SX10。
4 全站型扫描仪工作原理
4.1 扫描系统的工作原理
三维激光扫描仪作为目前时效性最为强大的三维数据获取的设备,根据其扫描的平台可以分为三种:机载激光扫描系统、便携式激光扫描系统以及地面型激光扫描系统[4]。Trimble SX10属于地面型激光扫描,由扫描仪主体、相机及处理软件等构成。
Trimble SX10每秒可测高达26,600个点的高精度数据,测量距离可达600m。但采集的点云数据会呈现近密远疏的特点,因此在作业过程中,应在满足密度需求的范围内进行测量以保证扫描数据的精度。
测量作业前期,应按照使用仪器规定与待扫描隧道长度,确定单次扫描的距离及扫描的次数,如东山隧道需扫描距离为120m,则分两次扫描,确保两次扫描区域有不少于5m的重叠,如第一次在洞口位置,第二次则在距离洞口45m处。

图1 扫描点云分布图

图2 扫描站位示意图
扫描系统的工作原理主要是发射激光并接受被扫描对象表面反射的信号来完成三维点云数据采集,进行匀速等角度拨角转动激光测距仪,不断重复地记录扫描对象表面的三维坐标,从而实现三维的构建。
通过计算目标点P与扫描仪之间的距离L,同步测量每束激光横向扫描角度ɑ和纵向角度θ[5]。通过已知点进行设站后,扫描仪即可使用独立坐标系或者工程坐标系,X轴与横向扫描面平行,Y轴与横向扫描面垂直,Z轴与X,Y所代表的扫描平面垂直,地面三维激光点云中O点的三维坐标如图3所示。
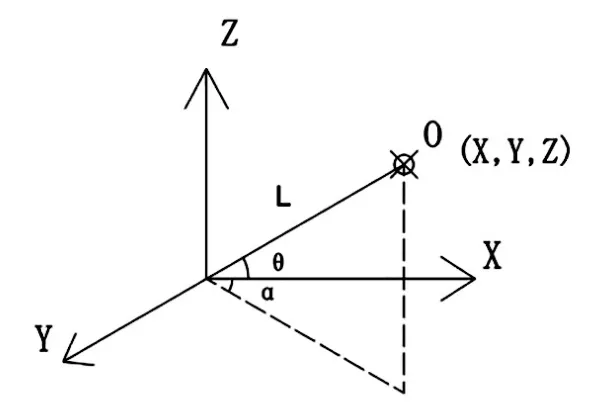
图3 扫描三维坐标
设t为发射脉冲的往返时间间隔,C为光速(即脉冲的速度),因此扫描点与仪器中心的距离为L
则O点坐标为:

4.2 全站型扫描仪的优点
①数据采集速度快,能够在短时间内获取到大量目标的三维信息;
②数据内容丰富,可在通过同步拍摄的照片,获得目标表面的色彩信息,为目标的分类以及识别提供了有效的依据;
③测量精度高;
④主动性工作。
4.3 与普通扫描仪、全站仪的区别
①保留了全站仪的精度,但无需手动测量点位;
②省略点云拼接这一步骤;
③点云在施工坐标系或设站坐标系内;
④无需坐标系的转换无需安置靶点;
⑤无需数据配准、数据滤波;
⑥由于扫描全站仪是通过全景照片进行染色与三维激光扫描不同,不包含点的强度信息和颜色灰度信息。
5 技术路线
使用Trimble SX10进行作业,其流程可以大致分为三部分:作业前准备过程-外业操作-内业数据处理。
5.1 作业前准备
实地查看隧道内点位的分布情况,根据要扫描任务的长度,确定单次扫描距离与扫描次数,根据周围环境找到架站最合适的设站位置进行标记。
5.2 外业操作
分别在两个测点上架设扫描仪和后视点,对中整平完成后,将测站坐标和后视点坐标输入操作手簿,进行定向测量并检查定向是否准确。确认定向准确后,设置取景方式,对需要扫描的区域进行扫描。完成后在手簿中查看数据,确认无误后转移测站,重复此步骤直至完成。

图4 扫描作业流程图
在设置扫描参数时,首先设置取景方式(扫描范围),共有“矩形、多边形、水平带和全部范围”四种方式,根据现场的需求选择合适取景方式。点云密度依据不同的检测内容应该有所区分。

扫描作业点云密度建议表 表2
5.3 数据处理

图5 扫描点云数据处理流程图
5.3.1 设置参数
输入水平与垂直定线的相关参数信息,创建平纵曲线并建立断面参数信息。
输入水平定线参数:
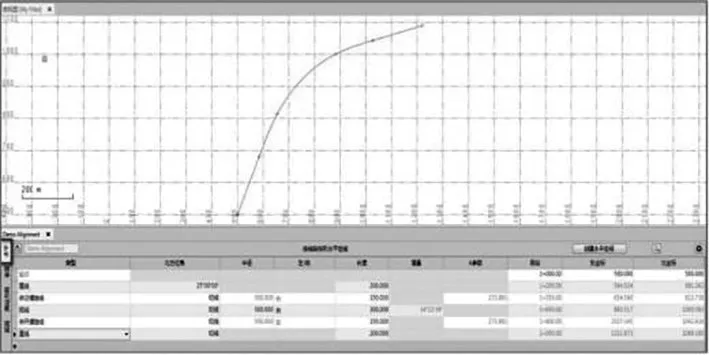
图6 水平定线

图7 垂直定线
创建垂直定线:
输入模板线性参数:
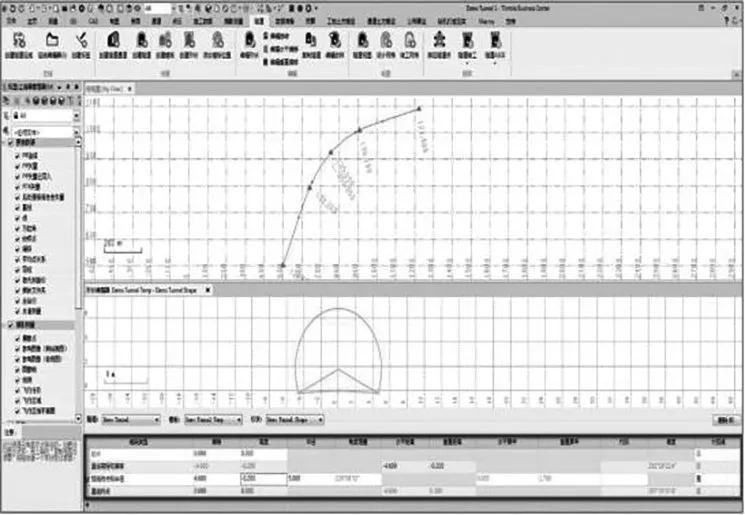
图8 模块线性
5.3.2 导入点云
将点云数据导入TBC软件,剔除噪音点。

图9 点云数据导入
图10为剔除噪声点后的隧道点云。

图10 点云除噪
根据需要里程、间距等指定隧道断面点,并进行数据处理分析。
5.4 输出结果
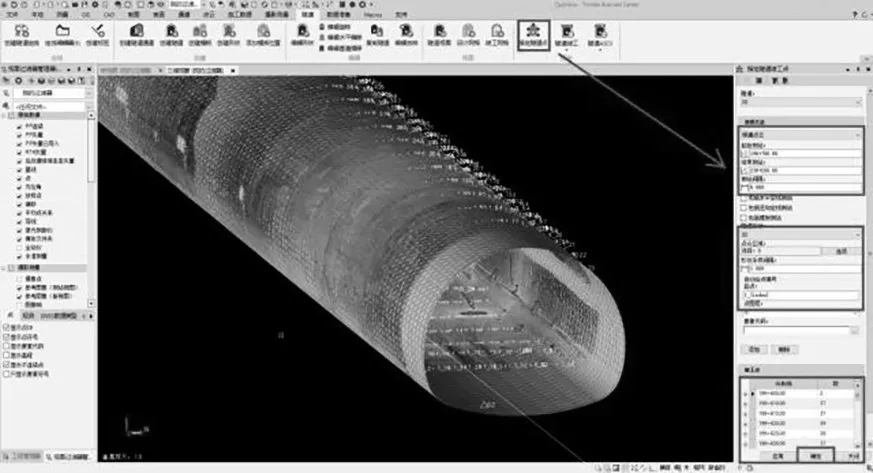
图11 点云数据处理
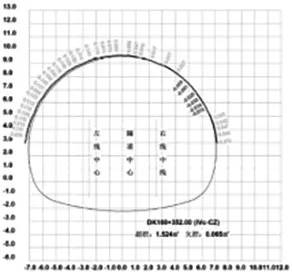
图12 超欠挖分析
①超欠挖分析:
②隧道二衬净空轮廓与建筑限界检测:

图13 隧道净空及限界

图14 点云对比

断面及方量计算 表3
③混凝土量计算:
见表3。
④变形监测-通过同一里程不同期点云对比:
6 结语
三维扫描技术能够快速获取海量高密度高精度的目标空间信息,突破了传统单点测量的数据采集处理方法,具有无接触式测量、扫描速度快、数据信息量大、精度高等特点,完全能够满足建设工程的应用需求,且在保证高精度的同时还大大提高了生产效率,其采集的点云数据可以运用于隧道初支、衬砌等断面与收敛变形的分析与评估,这是目前现有的隧道断面测量方法所不能比拟的。