无人机倾斜摄影测量技术在房地一体项目中的应用研究
2022-03-09张显升
张显升
(三和数码测绘地理信息技术有限公司,甘肃 天水 741000)
近年来,无人机发展迅速,尤其是低空、长时间续航的无人机发展成为了主流。传统的无人机上挂载垂直相机,就可以进行测绘产品的生产,其核心使用的是共线方程。通过恢复摄影时地面和相机之间的关系,结合飞机在空中的位置和姿态,就可以获取地面相对精度较高的地面点[1-2]。这种方式主要用来生产空三加密成果、数字正射影像图和大比例尺地形图成果。在生产1:500 地形图时,其精度很难达到项目要求,因此需要寻求另外的方式生产精度要求更高的地形图成果。随着相机质量减轻、集成技术不断提升,将单相机换成多相机,从多个角度获取影像,用于数据的生产成为了研究热点[3-4]。通过测试,这种方法生产的1:500 地籍图精度很高,完全满足项目精度要求。随着房地一体项目的开展,由于其精度要求高且工期紧、费用低,采用传统全野外作业方式,不但不可能按时完成项目,而且需要支出的费用更高,全部是外业作业,风险性也高,因此将多镜头获取数据的方式用于房地一体项目中来,成为了研究热点[5-7]。通过无人机搭载倾斜相机,获取多角度影像,用于三维模型生产,然后在三维模型上直接裸眼采集房屋、宗地等,通过精度检测,成果精度不一。本文主要是针对这种成果精度不一进行分析,然后对影响因素进行优化处理,给出切实可行的方案,然后以实际项目进行精度验证。结果表明:采用本文的方法,生产的成果精度均衡,且满足地籍精度要求,可以作为地籍图生产的一种优化方案,具有较强的实用性。
1 倾斜摄影测量技术介绍
主要从倾斜摄影原理、倾斜摄影建模软件和倾斜摄影流程进行介绍。
1.1 无人机倾斜摄影原理
“倾斜”一词是相对“垂直”来说的,其主要区别在于获取地面影像角度的不同。倾斜摄影测量是指在作业平台上,挂载倾斜摄影仪,对地面进行影像数据获取,然后用来建模,生产测绘产品的技术。作业平台主要有有人机、无人机等,考虑到成本和作业区实际情况,多数作业采用的均为无人机[8-9]。挂载倾斜摄影仪主要分为量测和非量测的,考虑到相机的成本,通常采用的是非量测小像幅相机。通过从空中获取地面多角度、全方位影像,然后结合相机曝光时的空中位置和姿态,通过共线方程和影像匹配技术,得到地面相对坐标系下的特征点,通过密集匹配技术,得到密集的三维坐标点,还原地形真实状态[10-11]。通过控制点的引入和转刺,将相对坐标成果纠正到控制点坐标系下,得到最终的高精度三维成果。5 镜头获取地面影像示意图见图1。

图1 无人机倾斜摄影示意图
1.2 无人机建模软件介绍
建模软件分为传统的手工建模软件,如3dsmax等;基于倾斜空三成果的建模软件,如dp-modeler 和SVS-modeler 等。本文主要研究的是倾斜摄影自动化建模软件,目前常用的有瞰景科技的Smart3D2021、大疆的大疆智图、本特利的Context Capture(简称CC)和photoscan 等。倾斜摄影建模软件具有自动化程度高、集群作业效率高等特点,但是不同软件精度不一,适用的场景也不一样。结合房地一体项目和软件的特点,照片数基本上都在1w张左右,建模选用CC软件,该软件精度较高,且处理1W张影像效率高、空三精度高。
1.3 无人机倾斜摄影建模流程
从作业场区来说,无人机倾斜摄影建模主要分为外场和内场。外场主要包括航摄前的测区勘探、空域申请、航线规划、控制点测量和影像数据获取;内场主要包括外场成果整理、工程创建、数据空三解算、控制点转刺、平差调整、自动化建模、地籍图采集与编辑等,具体作业流程见图2。
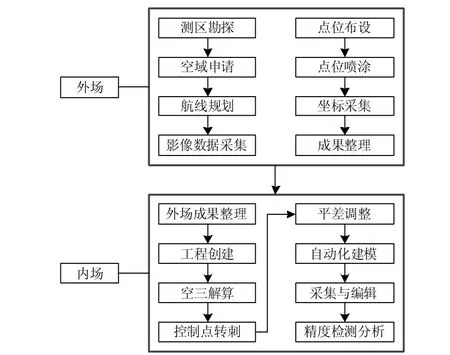
图2 无人机倾斜摄影建模流程
2 倾斜摄影建模精度影响因素分析
2.1 控制点靶标和精度方面
传统的靶标,是在地面上随机选取特征点,然后采集坐标时,手扶对中杆进行对中,目测差不多时进行坐标采集。这种方式获取的坐标点成果,其精度损失有两方面:一是采集坐标时,其精度较低;二是在内业进行控制点转刺时,由于无法准确判断外业采集的点位,导致刺点精度较低。
由于特征点会导致内业转刺精度损失,因此需要对点位靶标进行改正。可采用油漆喷涂式靶标,这样点位明确,有利于内业准确刺点。对于外业采集点位精度低的问题,可采用静态的方式进行点位坐标的采集。传统的特征点和油漆喷涂的靶标见图3。

图3 外业控制点示意图
2.2 建模软件选取
影像成果的质量由外业来决定,影像数据解算主要由内业软件来完成。不同软件,其空三解算算法和精度是不一样的,在分析了各软件的优势后,选择CC 软件来进行数据解算,不但精度高,且空三解算质量高,可以有效保证后续成果的精度。
2.3 航摄方式方面
主要是指外业获取数据的方式,目前影像数据获取的方式有固定航高飞行、变高飞行以及仿地飞行。对于地势平坦地区,可以采用固定航高飞行;对于地势变化有规律的地形,可以采用变高飞行;对于地势起伏变化无规律的,可以采用仿地飞行。其中前两者无需高精度的DSM数据,仿地飞行需要高精度的DSM数据。一般都是采用垂直摄影方式获取影像后,进行数据解算,得到DSM成果,然后利用该成果进行仿地航线规划,然后进行仿地航摄。该方法获取的影像分辨率均匀,成果解算精度高。
2.4 模型质量和完整性
模型质量、精度和完整性,直接影响测图成果的精度。虽然倾斜摄影已经获取了多角度的影像,但是由于遮挡关系,部分区域还是盲区,未采集到有效影像。在数据解算和建模的过程中,这块盲区解算精度不高,建出的模型存在拉花变形等严重问题,会对测图精度带来影响。
这种情况下,可以利用立体像对进行补充采集,对于立体像对无法采集的部分,可采用人工外业补充采集的方法进行,这样可以提高地籍图成果的精度。
2.5 作业人员方面
裸眼测图是近年来兴起的一种测图方式,较传统虚拟立体测图,其具有所见即所得的特点,使得测图更有利于推广,生手可以在短时间内学会测图,这使得测图精度没有了保障。房地一体项目工期紧、任务量大,很多单位拟都大量招聘实习生进行数据生产。由于没有测图经验,在短时间内所学知识,无法对地物进行准确定位和采集,使得所采集的成果精度不均匀。这种情况下,需要提高作业人员的水平,才可以有效保障测图成果的精度。
3 项目案例
采用本文提到的精度优化解决方案,对实际生产项目精度进行验证分析。本次任务区有效面积约2.87km2,测区内地势起伏变化无规律。房屋分散不均衡,部分区域树木遮挡严重、建筑密集。
3.1 航线规划
本次航线规划均采用WapPointMaster 软件完成。首先利用其规划地面分辨率5cm的航线,挂载单镜头进行影像采集。在获得高精度的DSM数据后,利用其规划仿地飞行航线,地面分辨率1.5cm,然后进行仿地飞行影像数据获取,共飞行3 架次,获得有效影像数约3 万张。航线规划设置参数如图4 所示。

图4 航线规划参数设置
3.2 控制点测量
为了提高像控点的精度和内业转刺的精度,本次作业过程中,所有控制点均采用油漆喷涂的方式。利用油漆喷涂L形点位,然后采用静态的方式进行坐标点的测量。在喷涂靶标时,顺带对其点号进行喷涂,拍摄实地照片,便于内业进行精准点位转刺。在控制点采集完成后,随机均匀采集15 个检测点,该成果主要用来检查空三、模型成果,最终检查得到的地籍图成果。
3.3 影像数据采集
在点位喷涂好后,进行无人机航空摄影影像数据获取。在航飞前,首先对无人机进行例行检查,主要检查其各部件是否固定牢靠、相机是否正常曝光,内存卡是否可以正常对影像数据进行保存、电池电量是否可以保证完成一架次任务。在检查确保无误后,进行无人机影像数据的采集。在采集过程中,需要对无人机航飞情况进行观察,确保无人机飞行是受控的,避免发生无人机失控带来的其他意外事件发生。
3.4 数据质检和整理
在获得影像数据、POS数据和控制点成果后,对该成果进行质检。影像数据主要查其纹理是否清晰、对比度是否符合要求、是否存在虚化的现象;POS 数据主要查其是否完整;控制点成果主要检查其坐标采集是否准确,实地照片是否可以反映实际点位情况。通过检查,影像数据、POS数据和控制点成果质量符合要求,可以用于后续数据的生产。
3.5 空三加密及控制点转刺平差
在新建工程,导入影像和POS数据,完善相机参数后,就进行空三任务的提交。在提交空三任务时,参数使用软件默认的设置即可,通过多台电脑集群作业,完成空三自由网的解算与平差。通过人机交互方式查看加密成果,未发现明显的分层、弯曲现象。查看空三报告,加密点精度良好,重投影中误差为0.51pixel。空三解算后丢片很少,且多为边缘影像,对后续模型生产影响不大,空三成果可以直接使用。
设置控制点坐标系,导入控制点进行控制点的转刺。在转刺过程中,对于模糊、边缘点位未进行转刺,其余点位均进行转刺,转刺完成后进行平差。平差完成后,查看平差报告,控制点精度良好,可以满足项目生产要求。
3.6 三维模型生产
结合电脑的配置,本次设置瓦片大小为100m,平面简化设置为“0”,单位选择米,这样可以尽可能保留下建筑物的棱角结构。后期需要进行地籍图的采集,模型输出格式选择OSGB,在模型输出完成后,再次输出正射影像图。模型用来裸眼采集地籍图,正射影像图主要用来套合采集的地籍图,检查采集的是否准确。测区部分实景三维模型如图5 所示。

图5 测区部分实景三维模型
3.7 地籍图采集与编辑
本次采集选择清华山维EPS 软件,该软件上手容易,操作简单。首先将模型和xml 文件进行转换,得到EPS软件能够识别的DSM数据,然后导入DSM数据,在裸眼环境下,直接进行地籍图的采集。该软件有五点房功能,可以快速采集规则的四边房屋,大大提升了采集效率。对于模型变形严重区域,无法直接在模型上准确采集地籍图,可通过调入立体像对,在虚拟立体环境下补充采集地籍图。对于这两种方法无法采集的,需要在外业进行补充采集。测区部分地籍图成果如下图6 所示。

图6 测区部分地籍图成果
3.8 精度检测与分析
利用15 个检测点对地籍图点位精度进行检测[12],检测结果见表1。
通过表1 可知,15 个检测点中,残差最大为5.7cm,最小为2.8cm,其平均值为4.0cm,成果精度可以满足地籍规范要求[13]。

表1 地籍图精度检测统计表单位:cm
4 结论
倾斜摄影技术用于房地一体项目的技术已经被广泛使用,但是生产的地籍图成果精度参差不齐,成果精度不均衡。为了保证生产的成果满足项目要求,本文在分析了目前的作业方式的基础上,对其中影响成果精度的因素进行了分析,提出切实可行的解决办法。并通过实际项目进行生产验证,结果表明:按照本文的方式生产的成果精度高且均衡,可以满足房地一体项目要求,可以为房地一体项目生产带来借鉴。
