小龙虾头尾定向装置设计及试验
2022-03-09傅润泽
傅润泽
王爱民1
陈洪兴1
潘凤涛2
潘海艳2
(1. 盐城工学院海洋与生物工程学院,江苏 盐城 224051;2. 盐城市怡美食品有限公司,江苏 盐城 224341)
小龙虾(Procambarusclarkii),也称克氏原螯虾,近年来其产业呈加速增长态势,养殖产量和规模大幅增长[1-2]。然而小龙虾加工的前处理均是由工人手工完成,劳动成本高,加工速度和产量难以提高,而且很多企业还有招工难的困境。关于虾类的机械化加工研究主要集中在对虾、沼虾等一些产业成熟的虾类品种上,如滚轴挤压剥壳等脱壳技术[3-5]。而针对小龙虾机械化前处理的研究较少,包括自动化清洗分级[6-7]、超高压脱壳[8-11]等。水产品机械化加工的前提是机械化定向,目前有关鱼类的头尾定向、腹背定向研究较多[12-14],但其定向机理对小龙虾无借鉴意义。其他虾类如对虾的定向研究也有报道[15-16],但小龙虾机械化头尾定向的困难之处在于其形态特征与对虾等虾类存在巨大差异,小龙虾体型较大, 头大尾小,虾体粗短,与细长虾类相比更难定向;其次小龙虾熟制后尾部卷起,整体呈梭形,导致其在放置时具有不稳定性,增加了定向难度;同时小龙虾虾螯较长,不利于其在传统技术上定向,而有关小龙虾机械化头尾定向的研究尚未见报道。研究拟利用小龙虾头尾形态差异,提出一种小龙虾头尾定向方法,对小龙虾头尾定向装置进行设计与试验,以期为小龙虾定向设备的研发提供依据。
1 小龙虾头尾定向装置设计与工作原理
1.1 头尾定向装置总体结构
小龙虾头尾定向装置由滚轴输送分级机构、头尾定向机构及相关辅助机构组成,其整体效果如图1所示。
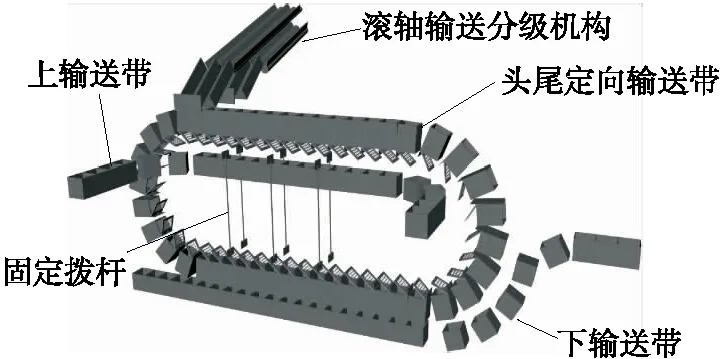
图1 小龙虾头尾定向装置整体效果图Figure 1 Structural schematic sketch of device forcrawfish head and tail orientation
1.2 头尾定向机构
小龙虾头尾定向机构由头尾定向输送带、上输送带、下输送带以及带有拨片的固定拨杆组成。头尾定向输送带为垂直方向的长环状输送带,由一定数量的头尾定向槽构成(图2),头尾定向槽下方设有带弹簧的虾螯捕捉网(尼龙绳网),由金属外框和绷紧的绳网构成,绳网空隙大于虾螯而小于虾尾。头尾定向槽下方两侧设有固定拨杆,拨杆顶端设有向内伸出的拨片。头尾定向槽运动时拨片可以碰到虾螯捕捉网。
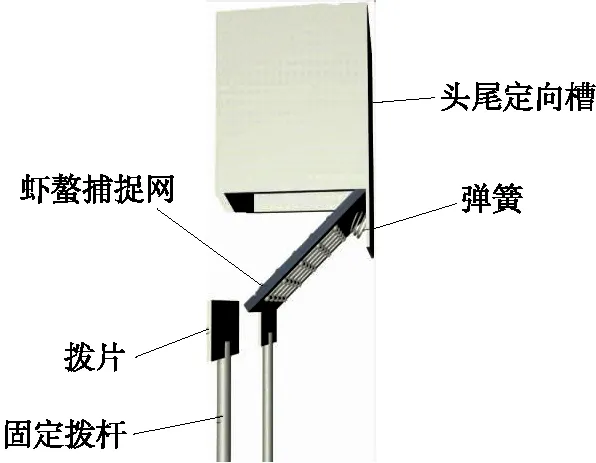
图2 单个头尾定向机构效果简图
1.3 工作原理
头尾定向装置工作原理:当头尾定向槽宽度小于额剑到龙虾腹部弯曲部分的距离时,小龙虾由分级输送装置掉落后进入头尾定向槽,分为头上尾下和头下尾上两种情况,小龙虾继续下落,碰到虾螯捕捉网。
(1) 头下尾上小龙虾虾螯或尖锐额剑被绳网勾住,无法下落;头上尾下小龙虾因为熟制后尾部圆钝,绳网无法勾住,一部分直接落入下方的上输送带槽内,上输送带与头尾定向输送带同步同速运动;头上尾下小龙虾也有可能因为摩擦力等原因不能直接掉下,而停留在虾螯捕捉网上,如图3所示。

图3 头尾定向装置工作步骤1Figure 3 Working step 1 of head and tail orientationdevice
(2) 随着输送带的运动,上拨片与虾螯捕捉网碰触,产生轻微震颤,使小龙虾落入下方上输送带槽内,输送带运动过程中根据工艺设置多个固定拨杆和拨片,保证小龙虾全部落下。而头下尾上小龙虾因为虾螯或尖锐额剑被勾住无法下落,如图4所示。

图4 头尾定向装置工作步骤2Figure 4 Working step 2 of head and tailorientation device
(3) 头下尾上小龙虾随着投喂定向槽继续运动,并完成垂直方向的掉头,头尾定向槽掉头后的下方设有下输送带,一部分小龙虾因为重力因素掉落进入下方下输送带槽内。另一部分因为绳网的钩挂等原因不能直接掉下,而停留在虾螯捕捉网上。随着输送带的运动,下拨片与虾螯捕捉网碰触,产生震颤,下拨片与虾螯捕捉网的碰触面积大于上拨片,震颤幅度加大,小龙虾落入下方下输送带槽内,输送带运动过程中有多个固定拨杆和拨片,保证小龙虾全部落下,如图5所示。
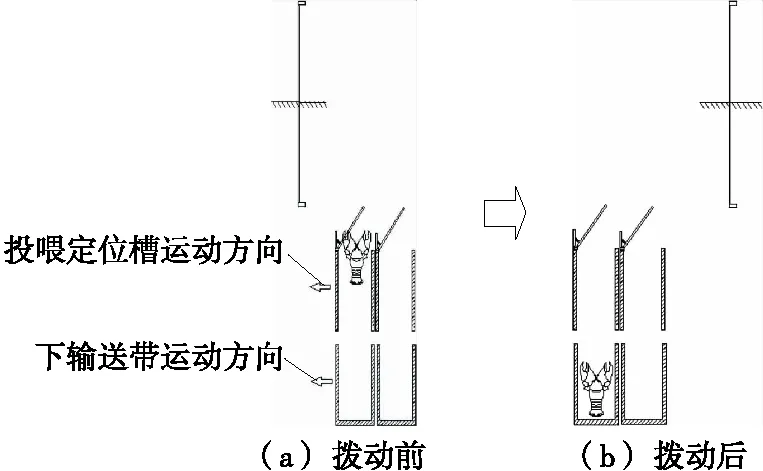
图5 头尾定向装置工作步骤3Figure 5 Working step 3 of head and tailorientation device
2 小龙虾头尾定向受力分析
对小龙虾头尾定向进行受力分析[17],定向槽各参数见表1。
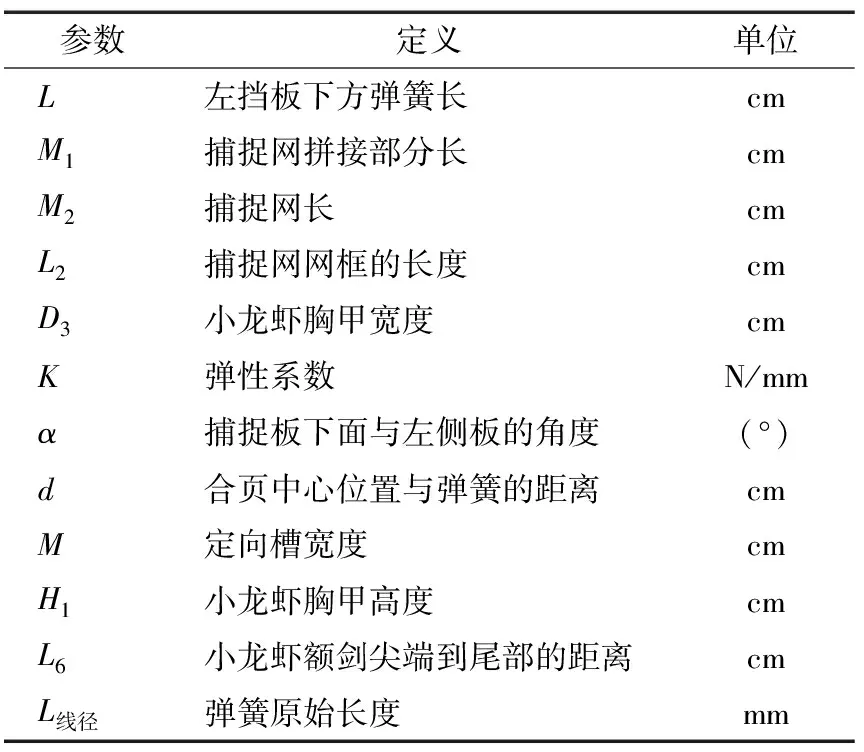
表1 定向槽各参数Table 1 Parameters of directional slot
2.1 小龙虾头朝下进入定向槽
当小龙虾头朝下垂直方向落入定向槽,并接触捕捉网后,小龙虾的受力分析如图6所示,小龙虾受到捕捉网垂直方向上的支持力F2,平行方向上的摩檫力F1,如果捕捉网可以提供的最大静摩擦力F1Max大于重力在捕捉网平行方向上的下滑力,那么小龙虾虾螯或尖锐额剑被捕捉网勾住,即满足式(1):
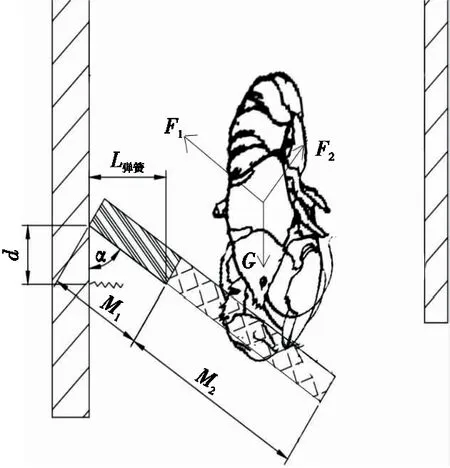
图6 小龙虾头朝下进入定向槽的受力分析Figure 6 Force analysis of crayfish entering orientationgroove head down
F1Max>Gcosα。
(1)
经分析发现,F1Max与捕捉网材质、网孔大小等因素有关,重力在捕捉网平行方向上的下滑力与小龙虾重量以及捕捉网角度α有关。试验选用表面粗糙的尼龙网为捕捉网材质,选取不同网孔大小的尼龙网以及不同捕捉网角度进行验证实验。
若小龙虾虾螯或尖锐额剑被捕捉网勾住,在重力作用下小龙虾倒向定向槽侧板,产生水平方向的支持力F4,小龙虾达到稳定状态,如图7所示。而小龙虾触碰到定向槽侧板需要满足一定的条件,主要与定向槽宽度有关,宽度过大的定向槽,小龙虾碰不到侧板,发生翻转滑落。在理想条件下,小龙虾可能有任意的掉落位置和倾斜方向,在极限条件下,若小龙虾额剑尖端到尾部的距离L6大于定向槽对角线长度,则任何条件下都不会发生翻转滑落;同时弹簧应该提供足够的支持力,使捕捉网能够支撑住小龙虾的重量,以上条件即满足式(2)和式(3)。

图7 小龙虾头朝下倾斜状态的受力分析Figure 7 Force analysis of tilted crayfish enteringorientation groove head down
(2)
F2=K×(线径-L弹簧)cosα>Gsinα。
(3)
但是考虑到小龙虾自身、弹簧以及捕捉网的形变问题,以及后期定向槽翻转后需要小龙虾的垂直状态等因素,选取定向槽宽度作为操作参数进行验证实验,以期找到较为合适的定向槽宽度参数。如果小龙虾虾螯或尖锐额剑未被捕捉网勾住,重力在捕捉网平行方向上的下滑力的作用下滑出定向槽,则小龙虾头尾定向失败。
2.2 小龙虾尾朝下进入定向槽
当小龙虾尾朝下垂直方向落入定向槽,并接触捕捉网后,小龙虾的受力分析如图8所示,小龙虾受到捕捉网垂直方向上的支持力F2,平行方向上的摩檫力F1,如果捕捉网可以提供的最大静摩擦力F1Max小于重力在捕捉网平行方向上的下滑力,且捕捉网与定向槽侧板形成的开口足够大时,小龙虾顺利滑出定向槽。即满足式(4):

图8 小龙虾尾朝下进入定向槽的受力分析Figure 8 Force analysis of crayfish entering orientationgroove tail down
(4)
若捕捉网可以提供的最大静摩擦力F1Max大于重力在捕捉网平行方向上的下滑力,小龙虾没有下滑,在重力的作用下倒向定向槽侧板,产生水平方向的支持力F4,如图9所示。
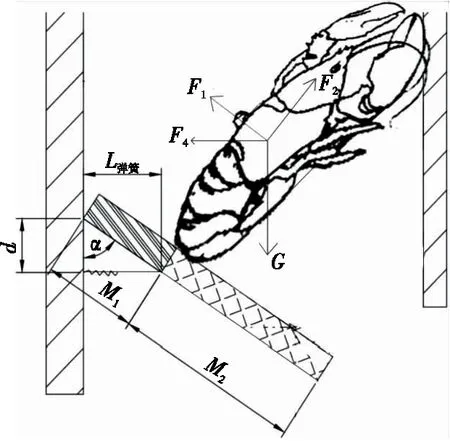
图9 小龙虾尾朝下倾斜状态的受力分析Figure 9 Force analysis of tilted crayfish enteringorientation groove tail down
当小龙虾未能顺利通过定向槽时,可以借助拨杆波动捕捉网,改变角度α大小,使重力在捕捉网平行方向上的下滑力增大,最终大于最大静摩擦力F1Max,使小龙虾顺利滑落,即满足式(5):
(5)
3 小龙虾头尾定向试验
3.1 试验仪器与设备
小龙虾头尾定向简易试验装置:该装置为数个不同捕捉网角度、定向槽宽度以及网孔大小等参数的头尾定向机构,未设置拨片机构,自制;其他主要仪器设备包括游标卡尺 (精度 0.1 mm)、钢尺(量程 500 mm)、电子天平(精度 0.01 g)等。
3.2 试验材料
小龙虾市售,产地盐城,挑选个体鲜活、虾螯完整的小龙虾,运至实验室后人工挑选大小规格相同的小龙虾,为了避免活体小龙虾运动对头尾定向过程的影响,将小龙虾加热熟制处理后待用。
3.3 小龙虾形态参数测定
通过对小龙虾头尾定向机理的分析,头尾定向槽、虾螯捕捉网等结构参数对头尾定向具有重要影响,其设计优化应具体参考小龙虾的各项形态参数,故对试验所选用的小龙虾进行质量和外观尺寸测量(见图10)[18-19]。实际测量时,如头部重量、胸部重量等参数受切割位置、角度等差异的影响,长度数据受到弯曲程度的影响,仅作为相对数据参考,不作为绝对数据,测量结果见表2和表3。

表2 小龙虾外形尺寸测量结果Table 2 Measurement results of crayfish body size cm

表3 小龙虾重量参数测量结果Table 3 Measurement results of crayfish body weight g

图10 小龙虾外观尺寸测量示意图Figure 10 Measurement schematic diagram of crayfishbody size
3.4 单因素试验
采用捕获率(头朝下)和通过率(尾朝下)作为小龙虾头尾定向效果的评价指标。小龙虾头朝下进入定向槽被捕捉网捕获视为捕获成功,小龙虾尾朝下进入定向槽未被捕捉网捕获,能够顺利通过视为通过成功,每次选用50只小龙虾样本进行试验,结果取平均值,并按式(6)、式(7) 分别计算捕获率和通过率。
(6)
(7)
式中:
R1——捕获率,%;
R2——通过率,%;
d1——每次试验成功捕获的小龙虾个数;
d2——每次试验成功通过的小龙虾个数;
n——每次试验小龙虾样本数。
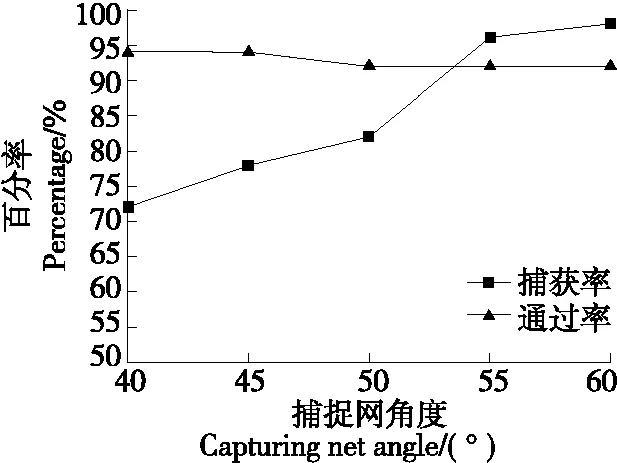
3.4.1 捕捉网角度 由图11可知,随着捕捉网角度的增加,小龙虾捕捉成功率逐渐上升,当捕捉网角度为60°时捕捉成功率最高为98%。实际试验时仅有一只小龙虾未能成功捕捉,可能与该只小龙虾在同一批次中体型偏小,虾螯短小且质地较软有关,在工业化加工时应严格分级,剔除残疾、死虾等不良龙虾个体,保证定位成功率。捕捉网角度越大,捕捉成功率越高,但尾朝下通过率会下降,后期可通过拨片波动捕捉网,使尾朝下小龙虾顺利落下,但应尽量降低拨片力度以降低其对捕捉率和虾螯完整度的影响,且捕捉网角度为55°时,已经达到了很高的捕捉率,故较优的捕捉网角度为55°~60°。
3.4.2 捕捉网网孔大小 由图12可知,随着捕捉网网孔尺寸的增加,小龙虾捕捉成功率逐渐上升,当捕捉网网孔尺寸为10~12 cm时,捕捉成功率达最高,可能是因为网孔越大,虾螯越容易深入捕捉网,小龙虾额剑也更容易被捕捉网挂住。试验的捕捉网网孔最大孔径为12 mm,远小于虾尾宽度,虾尾不容易被捕捉网挂住。故较优的捕捉网网孔大小为10~12 mm。
3.4.3 定向槽宽度 由图13可知,随着定向槽宽度的增加,小龙虾捕捉成功率逐渐下降。当定向槽宽度为5 cm时,捕捉成功率最高为100%;当定向槽宽度超过6 cm后,捕捉成功率下降较快,是因为定向槽宽度过大,头朝下进入定向槽的小龙虾有一定概率不能维持头下尾上的竖直状态,水平滑出不能顺利捕捉。而随着定向槽宽度的增加,小龙虾尾朝下通过率逐渐上升,是因为定向槽宽度过大时,尾朝下进入定向槽的小龙虾有一定概率不能维持头下尾上的竖直状态,水平滑出顺利通过。故较优的定向槽宽度为4~5 cm。
3.5 正交试验
在单因素试验的基础上,选取捕捉网角度、定向槽宽度、捕捉网网孔大小为试验因素,以头朝下捕捉率与尾朝下通过率为试验指标,采用正交表L9(34)进行正交试验。试验因素水平编码见表4,试验设计与结果见表5。

表4 正交试验因素水平表Table 4 Factors and levels of orthogonal test

表5 正交试验设计及结果Table 5 Orthogonal experimental design and results
由极差分析可知,影响头朝下捕捉成功率的主次因素为定向槽宽度>捕捉网角度>捕捉网网孔大小,最优组合为捕捉网角度55°、定向槽宽度4 cm、捕捉网网孔大小12 mm,此时头朝下捕捉成功率达98%。虽然此条件下尾朝下通过率相对较低,但后期的拨片设计(图2所示)可以保障通过率。综上,最优参数为捕捉网角度55°、定向槽宽度4 cm、捕捉网网孔大小12 mm。在此参数下,采购同一规格小龙虾,并依据规格尺寸以及虾螯完整度进行严苛筛选30只进行验证实验, 小龙虾头朝下捕捉率达100%,说明试验提出的头尾定向方法是可行的。
3.6 头尾定向整体装置的可行性分析
将单个定向机构与图1所示的小龙虾头尾定向装置整体效果简图对比发现,模拟单个定向机构的简易试验装置未能覆盖的因素有:① 定向槽高度。定向槽越高,小龙虾接触捕捉网时的速度越高。较高处的小龙虾的下落速度可以提高小龙虾尾朝下通过率,同时对小龙虾的虾螯完整度有一定影响。整体定向装置的定向槽是多层机构,定向槽高度 的设置需要考虑整体装置的设计,同时避免速度过快,影响虾螯完整度。② 拨片与虾螯捕捉网的碰触。理论设计时,为了防止尾朝下状态小龙虾不能顺利通过定位槽,设计了拨杆和拨片,拨片轻微拨动虾螯捕捉网,使小龙虾落下,拨杆和拨片设计还需进一步优化。
头尾定向槽尺寸6 cm,捕捉网网孔大小8 mm
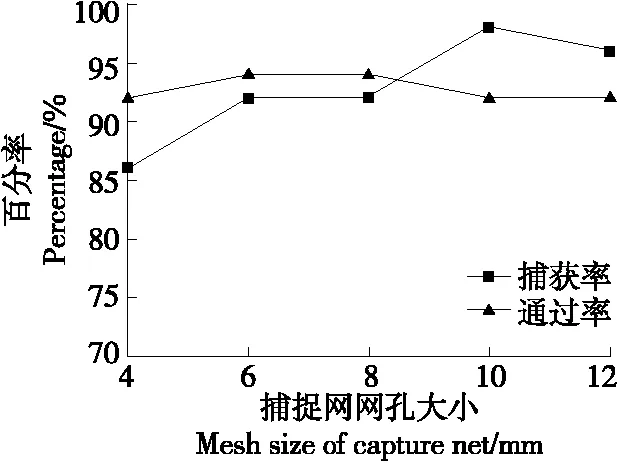
捕捉网角度55°,头尾定向槽宽度6 cm图12 网孔大小对小龙虾头尾定向的影响
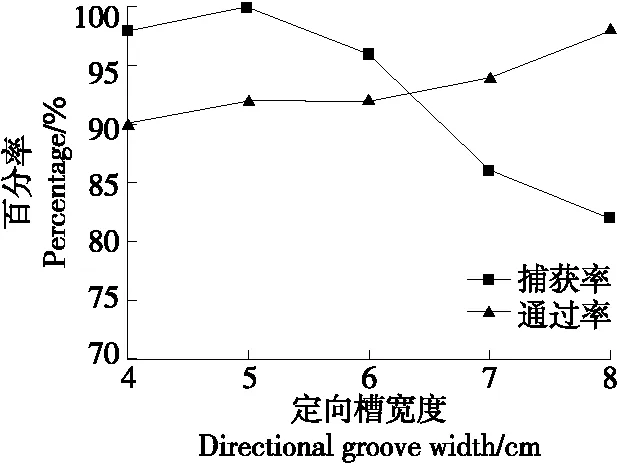
捕捉网角度55°,捕捉网网孔尺寸8 mm图13 定向槽宽度对小龙虾头尾定向的影响
4 结论
利用小龙虾头尾形态差异,设计了一种小龙虾头尾定向装置,由滚轴输送分级机构、头尾定向机构及相关辅助机构组成,小龙虾沿垂直方向的长环状头尾定向输送带输送,在捕捉网、拨片波动以及重力等因素共同作用下完成头尾定向动作。结果表明,小龙虾头尾定向装置的设计是可行的,试验条件下的最优参数为捕捉网角度55°、定向槽宽度4 cm、捕捉网网孔大小12 mm,此时小龙虾头朝下捕获率接近100%,尾朝下通过率达88%,考虑到后期拨片作用,可以认为尾朝下能够顺利通过。后续可对整体装置的各项参数进行进一步验证。
