免示教六轴焊接机器人在输电线路铁塔塔脚焊接中的应用
2022-03-09陈浩毛敏杨丰全包林波尚旭冉冯明
陈浩, 毛敏, 杨丰全, 包林波, 尚旭冉, 冯明
(1.江苏电力装备有限公司,江苏 常州 213000;2.上海新时达机器人有限公司,上海 201800)
0 前言
电力建设是国家经济运行的基础,而作为电力建设基础设施的输电线路铁塔,其加工优质、高效与否对电力建设的影响举足轻重[1]。随着中电网建设规模的不断扩展和输送的及的不断增加,铁塔塔脚加工批量增长与工期的缩短是的企业原有焊工队伍已不能满足现有生产需求,叠加今年焊工资源日趋紧张,对塔脚焊接向自动、智能化的焊接机器人发展提出了紧迫要求[2-7]。近年来,文中公司及国内先进铁塔制造企业尝试使用编程示教焊接机器人及拖曳示教塔脚焊接专机,一定程度上提高了塔脚加工、焊接质量和自动化程度。但面对非标准化的塔脚结构,示教编程时间长,严重影响生产效率;拖曳示教塔脚焊接专机一次拖曳示教一条焊缝,而塔脚共有12条焊缝,亦影响生产效率。
经过文中两家公司合作研发应用,新一代免示教六轴塔脚焊接机器人,针对塔脚工件内置三维建模、配合激光视觉达到了免示教自动识别焊缝寻位焊接的功能。
文中针对输电线路塔脚进行了免示教六轴塔脚焊接机器人全自动GMAW焊接试验。开展了焊后变形、焊缝外观、焊缝尺寸检验,并对免示教六轴塔脚焊接机器人生产效率与手工焊进行了对比分析。
1 免示教六轴焊接机器人简介
目前焊接机器人在焊接前必须进行机器人示教作业,即由操作者引导焊接机器人一步一步按实际任务操作一遍,焊接机器人在引导过程中自动记忆示教的每个动作位置、姿态、运动参数和工艺参数等,并自动生成一个连续执行程序,在完成示教后,启动焊接程序,焊接机器人将精准地按示教动作一步一步完成全部操作。
免示教六轴焊接机器人专为塔脚焊接应用场景开发,免去了繁琐的示教过程,可以大幅提升了非标准塔脚工件的生产效率。由六轴焊机机器人、视觉激光器、一套带夹具的两轴变位机、焊接系统、电气控制系统、触摸显示屏等主要部件组成。
将拼装好的工件放至变位机夹具平台,通过触摸显示屏,输入塔脚规格尺寸生成预览模型如图1所示;

图1 机器人参数输入示意图
输入焊接工艺参数,包括焊接电流、电弧电压、焊接速度、摆动幅值(摆幅)、收弧停留时长等。最后,激光传感器识别焊缝起始位置及终点位置,机器人根据输入的参数自动进行多层多道焊接,并实时显示和记录实际焊接参数如图2所示。整个参数输入时间约3~5 min,即可开始焊接。

图2 机器人实时信息显示界面
2 应用试验
塔脚试件主要由底板、主靴板、副靴板拼装点焊而成,如图3所示。塔脚工件,母材为Q355B,焊接填充材料为φ1.2 mm的ER50-6型实心焊丝。化学成分见表1,焊接保护气体为80%Ar+20%CO2。

图3 塔脚工件示意图

表1 塔脚母材与焊接材料化学成分(质量分数,%)
通过机器人触摸屏输入焊接工艺参数如图2所示。建立塔脚焊接信息数据库,后续相近规格塔脚可以直接调用或参数微调。机器人对于参数配方能够保存并通过USB存储介质导出EXCEL表格为以后工艺参数做参考,同样也能够预先在EXCEL中编辑好的参数表直接导入焊接机器人系统中,焊接工艺参数输入示意见表2。
为控制焊接变形,以免影响后期输电铁塔安装,塔脚焊缝焊接顺序如图4所示,按照1至12的顺序,先焊接安装角钢主材处的平焊缝(序号1)以减少焊缝变形对安装的影响。针对不同塔型的塔脚,诸如单拼、双拼平焊缝数量位置的不同,可对焊接顺序进行调整。

表2 焊接工艺参数输入
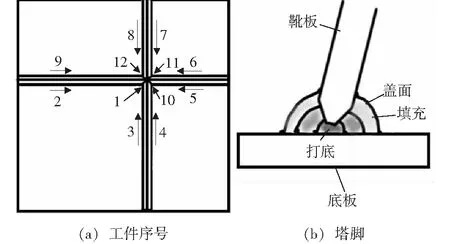
图4 塔脚焊接示意图
3 试验工件检验
3.1 焊接变形检验
塔脚焊接后会产生变形,影响安装质量。在焊接前,通过在平焊缝位置点焊短头角钢来减少焊接变形,同时平焊缝所在象限为后期角钢主材安装位置,可最大程度的减少焊接变形对后期安装的影响。
以2种规格塔脚工件开展焊接变形试验,工件1底板规格640 mm×640 mm,底板厚50 mm,靴板厚度16 mm;工件2底板规格600 mm×600 mm,底板厚50 mm,靴板厚度24 mm,各4只塔脚焊接后变形见表3。由表4可见,免示教六轴焊接机器人焊接工件,安装角钢主材的平焊缝位置的焊接变形量控制在0.4°以内,满足特高压及一般输电线路工程铁塔加工技术要求。此外,六轴机器人与人工相比,可消除人为变量,使整体焊接变形更稳定。

表3 机器人焊接变形试验塔脚工件规格

表4 2组塔脚工件机器人焊接变形量 (°)
3.2 焊缝外观质量
对比机器人焊接(图5a)和手工焊接(图5b)焊缝外观质量。可以明显看出,机器人焊接比手工焊接质量更加稳定,焊缝外观呈现均匀的鱼鳞纹、成形好,焊缝与基体金属间圆滑过渡,焊缝笔直。而手工焊接焊缝整体直线度相对较差,存在少量咬边的情况。

图5 焊接机器人和手工焊缝外观
3.3 焊缝尺寸检验
根据GB/T 2694—2018《输电线路铁塔制造技术条件》标准中表8(角焊缝外形尺寸允许偏差)的要求并结合一般输电线路工程铁塔加工技术规范,要求焊脚尺寸hf≥靴板厚度。通过设置合适的焊接工艺参数,包括焊接电流、电弧电压、焊接速度、摆幅、停留时间。检测多组规格塔脚焊缝尺寸见表5,焊缝尺寸允许偏差均能满足要求。
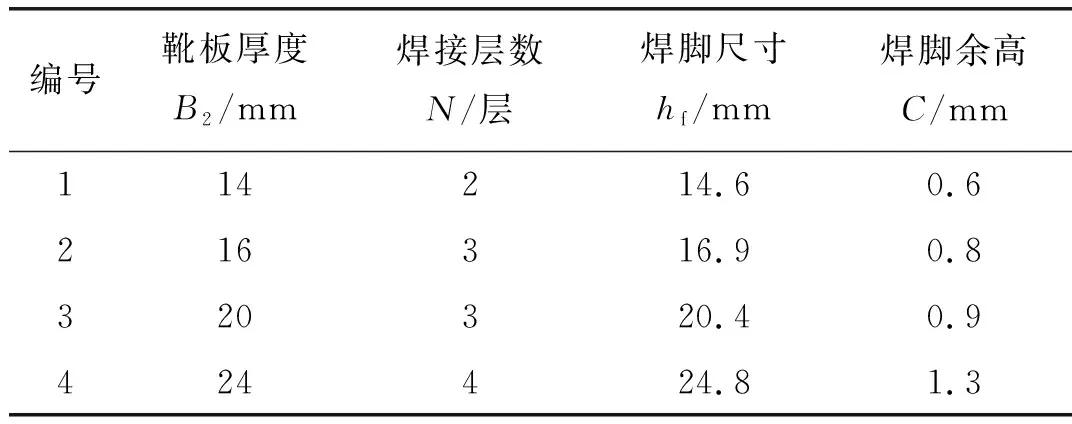
表5 机器人焊接多种规格塔脚的焊脚尺寸
4 免示教六轴焊接机器人意义及生产效率
4.1 意义
示教控制是机器人在焊接结构偏差极小的批量工件时的一种常用形式。但是对构件形体差异大、批量较小,采用示教跟踪的方式会占用操作者大量的使用时间,造成机器人工作效率达不到预期要求或者频繁示教容易出现精度下降[8],这点在铁塔塔脚焊接尤为明显。
免示教的意义及特点就在于克服了塔脚工件品种多、批量小、工艺复杂等制约自动焊接设备应用的难题,在面对多塔型、多规格塔角时,免去示教的人工操作,大幅提升了生产效率。
4.2 生产效率
对比1台免示教六轴焊接机器人与1个焊工手工焊接不同规格塔脚的生产效率,见表6和图6。5号塔脚520 mm×520 mm×540 mm,6号塔脚640 mm×640 mm×680 mm,7号塔脚652 mm×652 mm×680 mm,8号塔脚1 040 mm×1 040 mm×1 250 mm。从表6和图6可以看出,塔脚规格较小时,由于机器人上下料、装夹占用部分时间,导致机器人焊接时间与手工焊接相当。但随着塔脚规格增大、靴板增厚,机器人相比手工焊接效率提升快速增加。

表6 机器人及手工焊接多种规格焊脚的焊接工时统计
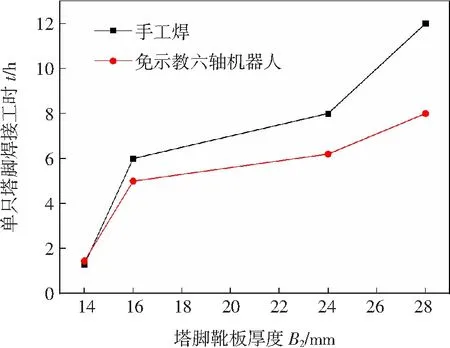
图6 焊接工效对比图
免示教六轴焊接机器人在完成工件装夹和参数输入启动焊接后,操作工在机器人自动焊接时,可以穿插对其他塔脚的加劲板焊接工作,进一步提升生产效率。从表6来看,1台免示教六轴焊接机器人整体效率可大致相当于1.5名手工焊工。若采取1人双控2台免示教六轴焊接机器人的方式,效率还将提升。
5 结论
(1)经过应用试验,免示教六轴焊接机器人可以高效、简便的用于输电线路铁塔塔脚的焊接作业。克服了原先示教导致额示教频繁、示教时间长、操作要求高的问题。
(2)基于免示教六轴焊接机器人焊接工艺,塔脚工件焊接变形、焊缝外观及尺寸满足技术要求。
(3)经试验对比,免示教六轴焊接机器人较传统手工焊接,焊接质量更高且更稳定,生产效率随着塔脚规格增大大幅提高。
(4)免示教六轴焊接机器人的应用,为输电线路铁塔塔脚焊接自动化、智能化提供了切实可行的方案,将有效缓解焊工资源紧缺的难题。