基于纯电动车电子机械制动系统的永磁同步电机控制
2022-03-07陈超CHENChao张新星ZHANGXinxing李雨健LIYujian
陈超 CHEN Chao;张新星 ZHANG Xin-xing;李雨健 LI Yu-jian
(衢州职业技术学院,衢州 324000)
0 引言
纯电动汽车具有零排放、噪音小、行驶平顺、使用成本低、易于智能化控制等优点,目前在市面上销售的大部分纯电动车的续驶里程在500公里及以上,因此纯电动车非常适合在城市内代步。由于纯电动车没有变速器,因此相对于传统燃油车和混合动力汽车其结构较为简单,智造成本低。在行驶过程中由电机直接驱动车轮,起步、加速、减速平顺,没有换档的顿挫,具有更好的驾乘体验。传统燃油车排放的汽车尾气对生态环境具有一定的负面影响,不利于我国目前的碳中和,同时汽车尾气对人的健康也有影响。我国是全球第一大油气进口国,石油对外依存度高。汽车工业相对发达的各个国家相继提出了禁止销售燃油车的时刻表,各国及各大汽车企业逐渐加大对纯电动车的投入,我国对于纯电动车的发展同样非常重视,《中国制造2025》、《乘用车企业平均燃料消耗量与新能源汽车积分并行管理办法》等政策文件的发布推动着我国汽车行业的发展。截至2021年,我国汽车人均保有量相对于发达国家有较大的差距。综合考虑我国的市场因素、政策因素、能源结构、对环境的影响及纯电动车自身优势,对纯电动车的研究具有重要的意义。
制动系统是车辆的重要组成系统之一,这关系到车辆行驶的安全性。目前应用最多得是真空助力制动系统,其真空助力源由发动机提供。随着汽车电动化、智能化的发展,动力源由电机替代原有的发动机对汽车进行驱动,电机无法提供真空源,原有的真空助力器不再满足未来汽车的制动要求,能够应用在纯电动车上的电子机械制动系统是未来的发展方向。电子机械制动系统最主要由电子机械助力器组成,电子机械助力器代替真空助力器实现制动助力,其具有可调踏板制动感觉、主动制动、实现制动能量回收等优点。以博世的iBooster为代表,电子机械制动系统可以耦合人工制动力和电机助力,也可以由电机力单独实现制动功能,从而能够实现纯电动车的主动制动。电子机械制动系统主要由永磁同步电机提供制动助力,根据制动意图,控制永磁同步电机的输出以实现制动助力,从而满足制动要求。
1 电子机械助力制动系统结构
电子机械助力制动系统是电子机械制动系统的重要组成部分,其主要根据制动踏板信号及整车ECU信号,进行助力控制,提供制动助力作用于制动主缸,从而实现车辆的制动。电子机械制动系统主要由电子机械助力器、制动主缸、液压管路、制动轮缸等组成。其工作过程是当制动踏板踩下时,电子机械助力器接收到制动踏板的信号,电子机械助力器开始助力,推动主缸推杆。主缸产生液压力后,制动液通过液压管路流入制动轮缸,从而在车轮处产生制动力,实现车辆的减速。电子机械助力器的结构如图1所示,主要由永磁同步电机实现助力,由齿轮副、滚珠丝杠、助力阀体实现力的传递。永磁同步电机根据踏板推杆的行程,输出相应的转速和力矩。人工制动力与电机助力在反馈盘上耦合,共同作用于主缸推杆,从而推动主缸,实现制动。当实现主动制动时,踏板推杆无作用力,永磁同步电机单独助力实现制动,其工作过程是车辆ECU接受到传感器或摄像头信号,通过CAN总线发出减速控制信号给助力电机控制器,由电机控制器控制助力电机的输出位移及扭矩,使得电机助力单独作用于制动主缸上,从而在车轮处产生制动力。为了防止电路等故障影响助力电机工作,从而造成助力失效,车辆无法实现制动功能。电子机械助力器进行了冗余设计,当永磁同步电机失效时,踏板推杆在人工力的作用下踏板推杆直接推动主缸推杆从而产生主缸制动压力实现制动,从而保证在电路等故障下的制动系统安全。由于助力扭矩由电机进行控制,对电机的输出扭矩大小易于控制。因此,当踏板推杆输入不变,助力电机的负载不变时,调节助力电机的输出扭矩大小,可以实现不同的制动踏板感觉及助力特性。相较于传统的真空助力器,电子机械助力器可以通过控制助力电机不断调节其助力特性,从而能够满足不同驾驶者对于不同踏板感觉的需求,在车辆动态驾驶过程中,也可以根据不同行驶工装,动态调节制动助力特性,满足驾驶者的需求,从而使驾驶者具有更好的驾驶体验,也能提高车辆的制动安全性。
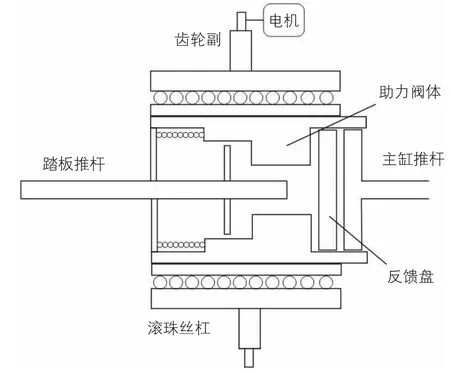
图1 电子机械助力制动系统结构
2 仿真建模
2.1 永磁同步电机模型
本文采用永磁同步电机具有复杂的非线性,由三相定子绕组和安装在转子表面的永磁体组成。假设三相永磁同步电机是理想的电机,做出以下假设:
①不考虑磁滞以及铁芯饱和的影响;
②定子三相绕组在空间上呈120度完全对称;
③忽视永磁铁的阻尼影响;
④气隙磁场正弦分布,不考虑高次谐波。
为了方便控制,通过clark变化和park变化把电机ABC三相坐标系转化为dq轴坐标系,永磁同步电机电流方程、转矩方程和运动方程如下所示:
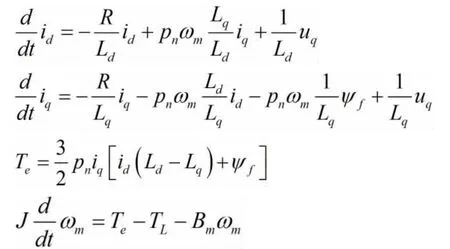
式中,id、iq为d、q轴上的电流;R为定子电阻;Ld、Lq为轴上d、q的电感,为了简化模型,两电感可以设为一样;pn为极对数;ud、uq为d、q轴上的电压;ωm为电机电角速度;ψf为磁链。在simulink中建立永磁同步电机进行仿真模型。
2.2 滚珠丝杠模型
电机输出转矩和转速经过减速机构降速增扭,速比为g,通过滚珠丝杠把减速机构输出的旋转动转化为平移运动。

3 基于制动意图的电机控制
根据制动踏板推杆的位移确定出助力电机的目标输出位移。对于电机控制主要是根据电机的负载控制电机的位移及转速输出,主要包括位移环控制及速度环控制。其控制过程如图2所示。参考位移与电机输出的实际位移差值作为位移环的输入,通过PI控制输出参考转速,再与电机实际转速的差值作为速度环的输入,再通过PI控制输出d、q轴上的参考电流。
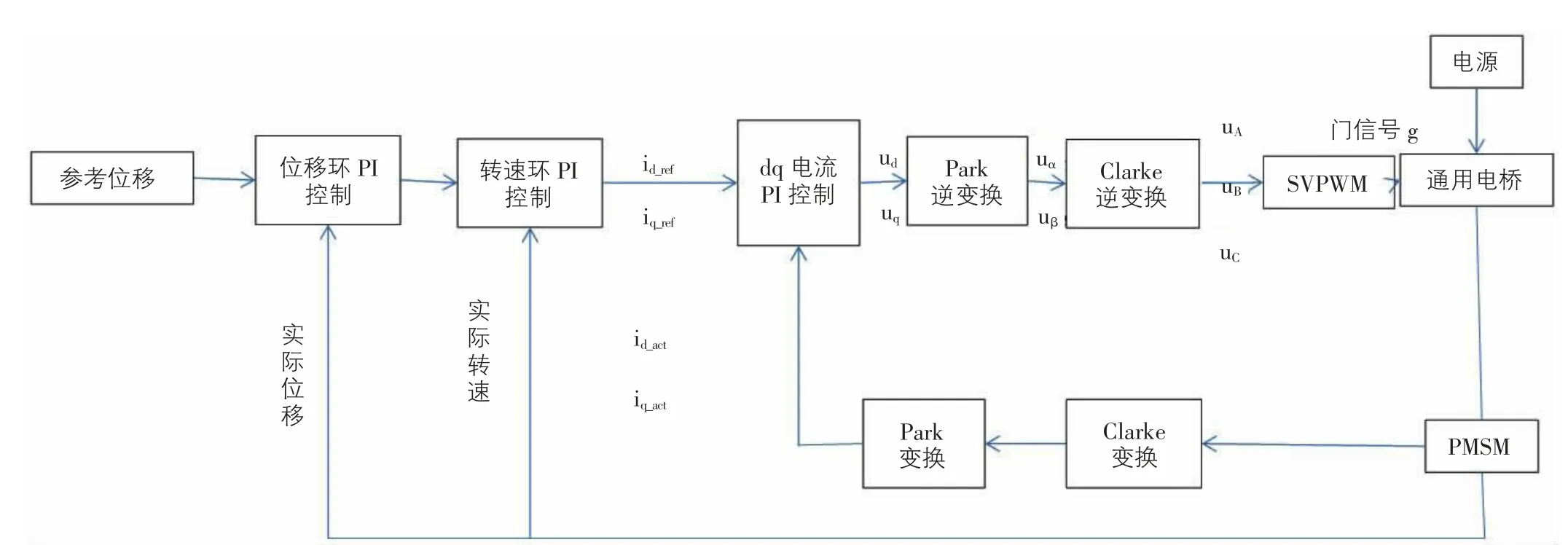
图2 永磁同步电机控制流程
式中,kp表示比例系数;ki表示积分系数。
由于永磁同步电机采用矢量控制法,需要对三相电进行转化。利用坐标系变换把dq坐标系变换到ABC坐标系中。电流环控制输出的电压经过Park逆变换、Clark逆变换后转变成三项电压。首先,采用Park逆变换将dq静止坐标系转换到旋转的αβ坐标系中。其次,采用Clark逆变换将αβ坐标系转换到ABC静止坐标系中,最后得到永磁同步电机在ABC轴上的电压电流,通过SVPWM调制后输出门信号到电桥对永磁同步电机进行控制。SVPWM是一种比较成熟的控制方法,能够使输出电流波形尽可能接近于理想的正弦波形,在工业上被广泛应用于电机控制。
4 仿真结果与分析
上文对电子机械助力器进行了建模,确定了控制方法及控制流程。本节输入转速、扭矩、位移等信号对永磁同步电机的模型及控制方法进行仿真验证,主要验证模型的正确性和控制方法的响应快慢。本文给定800rpm的参考转速及负载扭矩阶跃信号,其仿真结果如图3、图4所示,红色虚线代表参考值,蓝色实现代表输出值。
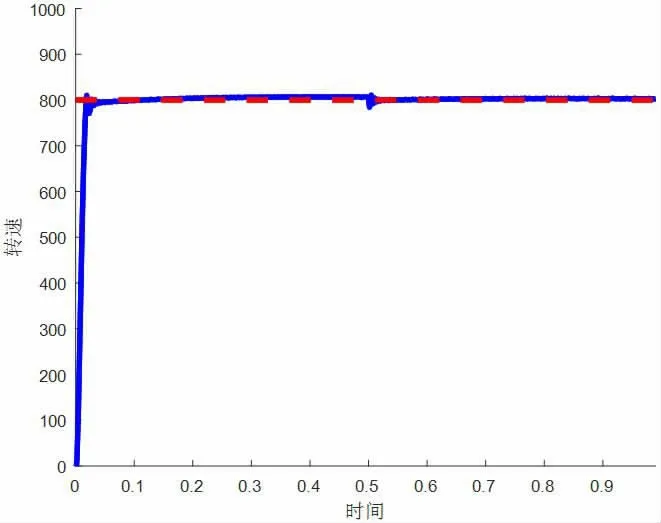
图3 永磁同步电机速度跟随
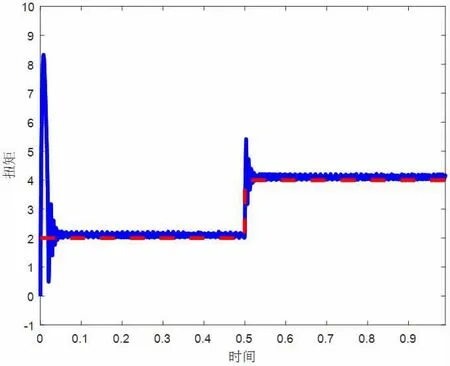
图4 永磁同步电机输出扭矩
在初始负载扭矩不变的情况下,电机在0.1秒内速度达到参考转速,并保持稳定。在0.5秒扭矩发生变化时,转速在短时间内轻微波动后趋于稳定。电机输出扭矩同样在0.1秒内达到负载扭矩,并趋于平稳,在0.5秒时,短时间内发生波动后趋于平稳。转速和扭矩在初始时波动较大,但持续时间极短。
输入电机参考位移,通过位置环、速度环、电流环控制,电机输出位移如图5所示,红细线为参考位移,蓝粗线为输出位移,其控制效果较好。
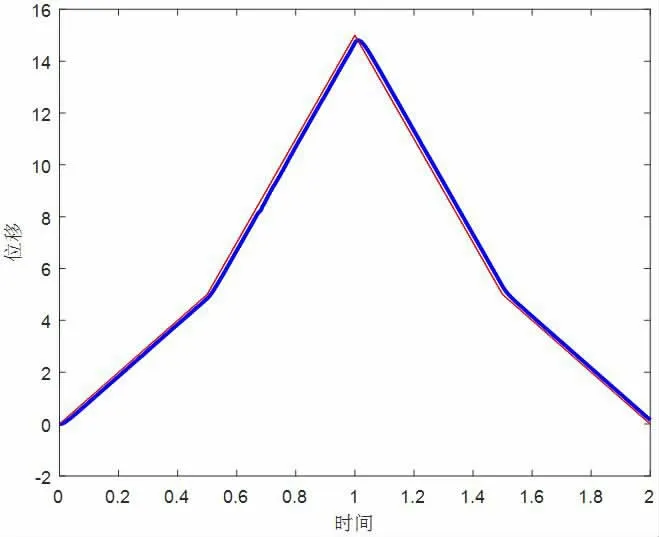
图5 永磁同步电机位移跟随
5 总结
本文首先分析了研究电子机械制动系统的重要性及意义,纯电动车是汽车智能化、共享化的主要载体。其次对电子机械制动系统结构进行了分析,建立了对电子机械助力器模型,主要建立了永磁同步电机数学模型,对电机进行了分环控制,分别对位移环、速度环、电流环进行PI控制。对电流环PI控制输出的电压进行Park逆变换、Clark逆变换,转变成三项电压后再采用SVPWM控制方法对电机进行控制。建立滚珠丝杠模型,把助力电机输出的转速转化为轴向位移推动主缸移动,建立主缸压力。最后,对建立的模型及控制方法进行验证,通过输入转速、负载和参考位移对电机控制模型进行仿真,结果显示在本文建立的模型及控制方法下,永磁同步电机的速度、扭矩和位移跟随情况较好,响应较快,波动时间短。因此,本文对纯电动车电子机械助力系统的建模及控制具有较好的效果,对之后后续的研究具有一定的借鉴意义。
