基于稀疏重构的空域-极化域联合抗主瓣干扰方法
2022-03-07杨书宁杨仲平张剑云周青松
杨书宁 杨仲平 张剑云 周青松
(国防科技大学电子对抗学院,安徽合肥 230037)
1 引言
在实际应用中,雷达面临各种干扰,提高抗干扰能力、保证雷达正常工作是当前研究的一个热点问题。雷达干扰可分为主瓣干扰与副瓣干扰,针对副瓣干扰,采用副瓣隐匿、副瓣对消等方法可以有效进行对抗;针对主瓣干扰,由于干扰信号与期望信号在空域上的差距很小,传统的对抗副瓣干扰的方法难以有效的应用于主瓣干扰对抗中。对于阵列雷达来说,干扰抑制的方法一直是研究者们非常关注的问题。
经典的自适应波束形成(ADBF)可以有效抑制干扰,但在主瓣有干扰的情况下,会出现主瓣失真的情况;文献[1]提出了阻塞矩阵预处理与协方差矩阵重构预处理的方法,能有效抑制主瓣干扰保持主瓣不失真,但难以对抗多个主瓣干扰;文献[2-3]提出了和差主瓣干扰相消(MLC)的方法,可有效抑制主瓣干扰,但并未涉及对波达角(DOA)的估计;文献[4-6]提出利用盲分离方法分离期望信号与干扰信号,但破坏了信号的相位信息;文献[7]先通过盲分离方法预估了混合矩阵,然后利用稀疏贝叶斯提取了期望信号,在保留信号相位信息的同时抑制了干扰信号;文献[8]利用稀疏恢复的方法重构了干扰信号与期望信号,有效抑制了干扰信号。
以上方法均是在空域上对抗主瓣干扰,虽然能够在一定程度上抑制主瓣干扰,但当主瓣干扰信号DOA 与期望信号DOA 的夹角很小时,这些方法的抗干扰性能会急剧下降。在这种情况下,仅利用空域信息进行抗干扰是不够的,对此,有学者们考虑从极化域抑制主瓣干扰。文献[9]提出了一种正交投影滤波器,能够有效抑制干扰,但可能会破坏期望信号的相位和幅值信息;文献[10]提出了一种基于信号极化子空间的斜投影极化滤波器(OPPF),该滤波器能在不破坏期望信号相位和幅值信息的情况下抑制干扰,但这种方法只能抑制一个主瓣干扰。此外,以上方法均是建立在已知各信号的参数的基础上的,当参数未知时,如何进行快速有效的估计,也影响了抗干扰性能。文献[11]利用空域自适应波束形成对抗副瓣干扰与近主瓣干扰,利用极化滤波对抗主瓣干扰,能够有效抑制多个主瓣干扰与副瓣干扰,但这种方法采用粒子群算法估计极化参数,估计误差较大,且计算量较大。
当前抗干扰方法存在的问题主要体现在两个方面:1.当面对空域上与期望信号相差很小干扰信号时,空域抗干扰方法性能急剧下降;2.极化域抗干扰的方法无法对抗多个主瓣干扰,且缺少有效的参数估计方法。
为了克服以上存在的这些问题,进一步提高雷达抗干扰的能力,本文提出了一种空域-极化域联合斜投影滤波方法,该方法首先利用稀疏重构对干扰信号的DOA 进行估计;然后在恒模约束的基础上,利用相关性最大的原则估计干扰信号的极化参数;最后利用估计得到的信号导向矢量,构建空域-极化域联合斜投影滤波器进行干扰抑制。仿真实验表明,该方法能够有效对抗主瓣干扰,与当前流行的其他抗干扰方法相比,整体上具有更高的输出信噪比,尤其是在对抗空域上与期望信号很相近的干扰信号时。此外,本文方法还具有较快的运算速度,符合雷达抗干扰的实际要求。
本文组织结构为:第1 节为引言,第2 节介绍信号模型,第3 节介绍本文算法原理,第4 节为仿真验证与分析,最后一节为结论。
2 信号模型
考虑一个N维均匀线性极化敏感阵列,阵元间距d=0.5λ为半波长。每个阵元都有两个相互正交的信号接收通道,即H(水平)通道和V(垂直)通道。假设M(M<N)个完全极化的干扰信号作用于该阵列。本文用空间角θ和极化相位描述字(γ,η)表示信号特征,其中γ和η分别代表信号的极化角度和极化相位差。假设第i个干扰信号的DOA 为θi,极化角度为γi,极化相位差为ηi。则在第k个快拍时,阵列接收到的干扰加噪声信号可以表示为:
其中,xi(k)表示第i个阵元接收到的信号,n(k)是独立同分布的高斯白噪声,si(k)为第i个干扰信号在时域上的复包络。v(θi,γi,ηi)表示第i个信号的空域-极化域联合导向矢量(即信号导向矢量),其可以表示为v(θi,γi,ηi)=p(γi,ηi)⊗a(θi)。其中,p(γi,ηi)表示极化域导向矢量,a(θi)表示空域导向矢量,⊗表示Kronecker 积。由文献[11-12]可知,具体的有:
其中,[·]T表示转置操作,此外,令as,p(θi,γi,ηi)=a(θi)⊗p(γi,ηi)为空域-极化域联合导向矢量(即信号导向矢量)。则阵列信号的接收模型可表示为:
其中,S(k)=[s1(k),s2(k),…,sM(k)]T为信号数据矩阵,AS为阵列接收空域导向矢量矩阵,AP为阵列接收极化域导向矢量矩阵,⊙表示Khatri-Rao 积。阵列的H通道和V通道接收信号可以表示为:
3 所提方法
3.1 利用联合稀疏恢复估计DOA
为了构建空域-极化域联合斜投影滤波器,需要先对干扰信号的DOA 参数与极化参数进行估计,经典的MUSIC、ESPRIT 和ROOT-MUSIC 方法可以有效进行参数估计,但都存在一定的不足:MUSIC 算法计算量大;ESPRIT 算法需要进行参数配对,比较繁琐;ROOT-MUSIC 算法的求根多项式阶数比较大。考虑到稀疏恢复的方法具有较高的角度分辨力和高精度[13],本文提出一种基于联合稀疏恢复的DOA估计方法,联合H通道和V通道的接收信号,构建稀疏恢复,对干扰信号的DOA 参数进行快速有效的估计,为后续的极化参数估计奠定基础。
由式(5)可得,阵列的H通道和V通道接收信号的自协方差矩阵:
其中,E{·}表示求数学期望,[·]H表示共轭转置运算,且:
由上式可知,该协方差矩阵的待估参数与信号的极化参数无关,只与入射信号的DOA 参数有关。因此,为了降低计算复杂度,可以通过这种方法将DOA 参数与极化参数相解耦,先对DOA 进行估计,在此基础上再对极化参数进行估计。为了进一步降低计算量,可对该协方差矩阵先进行矢量化操作,得到:
其中,r为新构建的数据矢量,B为拓展导向矢量矩阵,F=包含各信号的功率信息,具体的有:
vec(·)为矩阵转向量运算,1=vec(IN)=由此可以看出:B包含了所有来波信号的DOA 信息,且不包含信号的极化信息,因而对B进行估计,可以得到所有信号的DOA 估计。此外,由于r是一个矢量,可以看作单快拍的数据。利用该数据矢量可以简化参数估计的计算量,并且二阶统计量的运用可以有效抑制噪声的影响,提高算法的鲁棒性。这使得本文算法能够快速有效的进行DOA 估计,且在低信噪比的情况下也具有较强的DOA估计能力。
因此,为了快速有效的对DOA 进行估计,本文首先利用信号在空域的稀疏性,在空域角度内以固定步长构建网络,然后对数据矢量r,进行如下稀疏表示:
其中,Φ=为过完备字典,o为角度域的网格点数,u为稀疏度为M的稀疏矢量,其非零元素在Φ中对应的位置即为干扰信号的DOA。由此,利用l1范数的正则化方法,我们可将DOA估计问题转化为如下优化问题:
其中,λ为正则化参数,用于平衡残差与稀疏度的占比;而u中非零元素在网格中对应的角度即为干扰信号的DOA 估计。问题式(12)是一个凸问题,可以直接用内点法或快速迭代重加权投影算法(FIRIP)[13]得其最优解u*,可得其对应的M个干扰信号的DOA估计集合为Θ=。
3.2 利用相关性最大原则对极化参数进行估计
上一节中我们已经得到了干扰信号的DOA 估计,在此基础上,本节提出一种基于相关性最大原则与恒模约束的极化参数估计方法,能够快速有效的对干扰信号的极化参数进行估计。
由文献[14]可知,极化敏感阵列的信号导向矢量as,p(θi,γi,ηi)与观测矩阵X的相关性最大,因此,在得到各信号DOA 估计后,我们可以利用相关性最大原则估计其对应的极化参数,求解极化参数的问题可以转化为如下优化问题:
其中X为观测矩阵,即阵列接收到的信号,对于上式,有:
其中:G(θ)=由入射信号的DOA 估计值决定。则问题式(13)可等价转化为如下问题:
建立代价函数:
对上式求梯度,令其结果为0,可得:
即可得:
由式(18)可得,p(γi,ηi)为G(θ)做特征值分解后对应的特征向量,μ为对应的特征值。将式(18)带入问题式(15),可得:
3.3 空域-极化域联合斜投影滤波抑制干扰
上一节中我们已经对信号的极化参数进行了估计,加上之前已得到的信号的DOA 估计,可以得到干扰信号的导向矢量估计,具体的有:
假设已知期望信号的空间角为θ0,发射天线的极化角度和极化相位差为:(γ0,η0),则期望信号的信号导向矢量为as,p(θ0,γ0,η0)。由文献[15]可知,在理论上,斜投影滤波可以准确抑制干扰信号,且不会对期望信号造成幅度和相位失真。因此,本文选择利用空域-极化域联合斜投影滤波的方法,抑制干扰信号,并尽可能的恢复期望信号。由相关定义可知,本文空域-极化域联合斜投影滤波算子的可定义为:
经过波束形成后,整个滤波输出过程可以表示为:
其中Z(k)为滤波后的输出信号,w0为波束形成的权值,Y(k)为阵列接收到的信号,由上式可知,通过联合斜投影滤波器后,接收信号中的干扰信号基本都被抑制,输出信号中只剩下期望信号与残留的噪声信号,且期望信号的幅值与相位基本无失真。
需要特别说明的是:以上提到的参数估计方法是在目标信号的方向与极化参数是假设已知的情况下进行的,即本文所提到的DOA 估计与极化参数估计是针对干扰信号的。若目标信号的方向与极化参数是未知的,也可以用本文的方法对所有信号的DOA 与极化参数进行估计,但由于先验知识的缺失,并不知道估计出来的参数中哪一组是目标信号对应的DOA 与极化参数,哪一组是干扰信号对应的DOA与极化参数。无法进行接下来的干扰抑制。
但若干扰信号为噪声调频压制式干扰,而非欺骗式干扰,可以通过以下方法确定哪一组参数为目标信号对应的参数:
假设主瓣范围内的某一组参数为目标信号对应的DOA 与极化参数,利用本文方法构建联合滤波器,并进行脉冲压缩,若脉冲压缩结果显示为有一个明显的峰值,则说明该假设成立,这一组参数为目标信号对应的DOA 与极化参数,其余参数为干扰信号对应的参数;若脉冲压缩结果显示没有明显峰值,说明假设不成立。遍历每一组参数,则理论上一定存在一组参数使得假设成立,且该组参数为目标信号对应的参数,由此可以构建联合滤波器进行干扰抑制,同时保留目标信号。
因此,若干扰信号为噪声调频压制式干扰,本文所提方法在目标方向与极化参数未知的情况下,也可以进行干扰抑制,保留目标信号。在第4 节的仿真实验中,假设干扰信号均为噪声调频压制式干扰,目标的DOA 与极化参数未知,利用本文所提的方法进行参数估计与干扰抑制。
4 仿真实验与分析
4.1 有效性验证与分析
仿真实验时阵列采用20 元等距极化敏感均匀线阵,阵元间距为半波长,主波束指向10°。雷达发射信号为线性调频信号(LFM),发射带宽为0.5 MHz,脉宽1 μs,采样频率为1 MHz,快拍数为1000。假设电磁环境中存在一个静止目标,该目标位于第621 个距离门,空域入射角度为10°。2 个主瓣压制干扰,2个副瓣压制干扰,均采用噪声调频压制式干扰,为了便于分析,在不影响一般性的情况下,将各信号的极化相位差统一设置为90°。假设脉压输出的门限值设定为12.5 dB,干扰信号与期望信号的参数设置如表1所示。
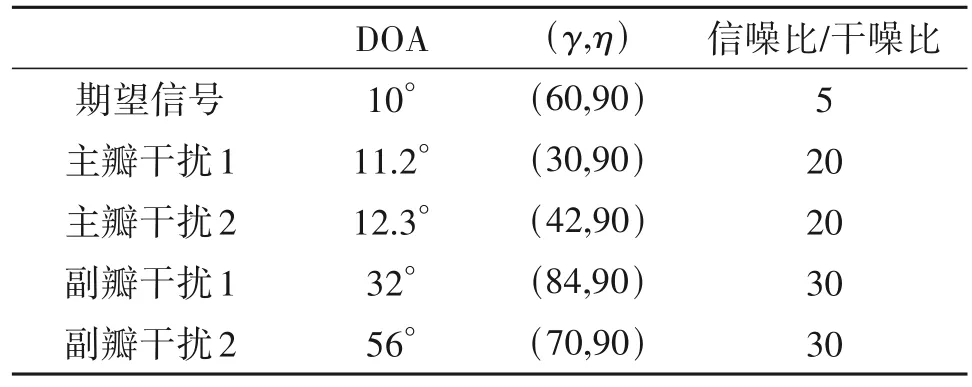
表1 各信号的参数设置Tab.1 Parameter Settings of each signal
图1给出了阵列接收到的信号直接进行脉冲压缩的结果,可以看见由于干扰的存在,期望信号被掩盖了,无峰值存在,无法辨别是否含有目标回波信号。图2给出了经过本文提出的联合斜投影滤波器滤波后,输出信号进行脉冲压缩的结果,可以发现,脉压结果显示有一个明显的峰值,位于的位置,说明本文方法能够有效的抑制多重干扰信号,并保留目标回波信号。此外,表2 中还给出了经过文献[5]、文献[7]和文献[11]处理后的脉压输出结果,可以发现,经过处理后,脉压输出信噪比都有改善,但本文所提的方法对信噪比的改善最明显。这是由于本文方法在有效估计DOA 和极化参数的同时,充分利用了极化域与空域的信息进行干扰抑制,能够更有效的抑制主瓣干扰。
此外,表2中给出了不同方法的运算时间、DOA估计均方误差(MMSE)和脉压输出信噪比(每个数据均为50 次蒙特卡罗(Monte Carlo)实验的平均值)。可以发现,本文方法的运算时间与文献[5]的方法相当,优于文献[11]和文献[7];DOA 估计MMSE 与文献[7]的方法相当,优于文献[5]和文献[11],脉压输出信噪比优于其他方法。因此,综合来看,本文方法在面对多个主瓣副瓣干扰时,具有更强的抗干扰性能和更快的计算速度,更符合雷达抗干扰实时性的要求。
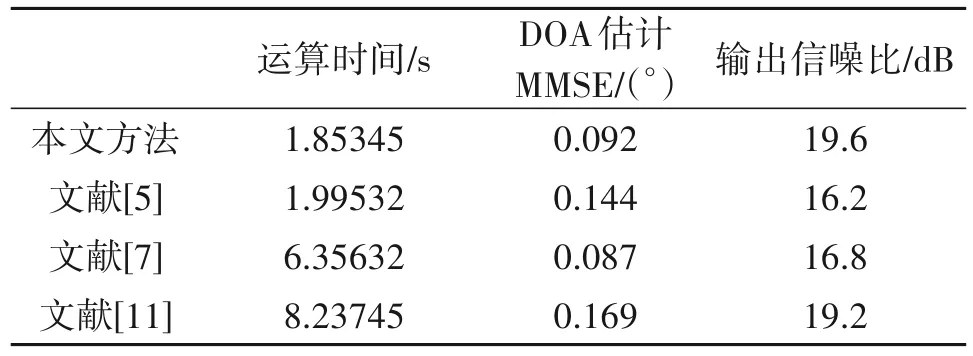
表2 各方法的性能对比Tab.2 Performance comparison of each method
4.2 性能分析
为了验证本文方法的抗干扰性能,将本文方法与文献[5]、文献[7]和文献[11]的方法进行对比,主要检验算法的运算速度、脉压输出信噪比、方向图、能够对抗的干扰数目以及极化参数误差对算法的影响等几个方面。
4.2.1 算法的运算速度与脉压输出信噪比
保持其他设置不变,图3 给出了在主瓣干扰1的入射角度变化的情况下,各方法的脉压输出信噪比;图4 给出了在主瓣干扰1 的干噪比变化的情况下,各方法的脉压输出信噪比;表3给出了在不同快拍数的情况下,各方法的运算时间。

表3 各方法的运算时间对比Tab.3 Comparison of operation time of each method
由图3可知,当主瓣干扰1的DOA与期望信号的DOA相差较大时,各方法都有较高的输出信噪比,当主瓣干扰1 与期望信号的DOA 相差很小时,各方法的输出信噪比逐渐降低,相对而言,本文方法与文献[11]的方法能够保持更高的输出信噪比,这是因为本文方法与文献[11]的方法利用了极化域的信息,在空域信息难以有效抑制干扰时,可以通过在极化域形成零陷抑制干扰,这也体现了极化域-空域联合抗干扰的优势;而本文方法比文献[11]的方法输出信噪比略高,是因为本文方法对参数估计的精确度更高。
理论上,只要主瓣干扰与目标信号在极化信息上有较大的不同,或者在空域上间隔较大时,利用本文方法都能够有效进行对抗。但由图3可以发现,当干扰信号在空域上的DOA 与目标信号的DOA 小于0.4°时,本文方法的输出信噪比低于门限值,算法失效。这是由于当干扰信号DOA 与目标信号DOA 相差小于0.4°时,本文方法无法有效分辨出目标与干扰信号,从而导致参数估计失效与算法失效。
由图4可知,随着干噪比的增大,各方法的输出信噪比均有下降,但整体来说,本文方法相比于其他方法,能保持一个较高的输出信噪比,这是由于本文方法联合了极化域与空域信息进行抗干扰,具有更高的自由度,能够形成更深的零陷抑制强干扰信号。同时,可以发现,当干噪比大于38 dB 时,本文算法的输出信噪比低于了门限值12.5 dB,算法失效,而设置的信噪比为5 dB,因此本文算法能够容忍的最大干信比为33 dB。
由表3可知,随着快拍数的增加,各方法的运算时间也在增加,在快拍数较小时,本文方法的运算时间与其他文献的运算时间相当,快拍数较大时,本文方法运算时间比文献[7]和文献[11]方法的运算时间低,与文献[5]方法的运算时间相当,文献[5]采用盲分离算法抗干扰,本文方法采用稀疏恢复方法进行参数估计并抗干扰,整体上这两种方法的计算量相当;而文献[7]不仅采用了盲分离算法估计混合矩阵,还采用了稀疏贝叶斯进行稀疏恢复,这增大了计算量,因此计算量大于本文方法;文献[11]采用粒子群算法进行参数估计,这是一种搜索算法,算法计算复杂度与种群数和迭代次数有关,为了保证较高的计算精度,通常需要设置较高的种群数与迭代次数,同时在每一次求解适应度时还涉及到矩阵求逆与极化度的求解问题,因此为了保证较高的计算精度,该方法也需要较大的计算量,尤其是在快拍数较大时,该方法的计算量大于本文方法。整体来说,本文方法的计算量与文献[5]的计算量相当,低于文献[7]和文献[11]的计算量。这是由于本文采用参数估计方法与斜投影滤波算法都具有较低的计算复杂度。因此本文方法在运算时间上也具有一定的优势,更能满足雷达抗干扰实时性的要求。
4.2.2 算法的方向图
图5 给出了本文方法产生的空域-极化域联合方向图,作为对比,图6 给出文献[11]产生的空域-极化域方向图,可以发现,两种方法都能在干扰信号处产生凹陷,但本文方法相较于文献[11],能够更准确的在干扰信号的方向形成深零陷,尤其是对于主瓣干扰信号。这是因为本文方法提出的参数估计方法相较于文献[11]中的粒子群方法更加有效,能够对干扰信号形成更有效的抑制。因此,本文方法能够更加有效的抑制干扰信号。
4.2.3 能够对抗的干扰信号数目
为了分析本文方法最多能够对抗几个主瓣干扰信号,我们保持原有的干扰信号不变,添加一个主瓣干扰信号,通过仿真可以发现在这种情况下,本文方法作用后的脉压输出信噪比约为10 dB,低于门限值,说明本文方法失效,因此本文方法最多能够对抗两个主瓣干扰信号。
为了分析本文方法最多能够对抗几个副瓣干扰信号,保持原有的干扰信号不变,添加一个副瓣干扰信号,仿真发现在这种情况下,本文方法输出信噪比约为15 dB,大于门限值,依然能够有效检测出目标信号;但若再添加一个副瓣干扰信号,本文方法作用后的脉压输出信噪比约为11 dB,低于门限值,无法检测出目标信号,因此本文方法最多能够对抗三个副瓣干扰信号。
综上,本文方法最多能够同时对抗两个主瓣干扰,三个副瓣干扰。这是由于当干扰信号的数量太多时,各个干扰信号被抑制后的残余信号合起来依然能够对目标检测形成有效干扰,导致本文方法无法有效的检测出目标信号。
4.2.4 极化参数估计误差对算法性能的影响
表4 给出了其他条件不变的情况下,脉压输出信噪比随极化参数(极化角)估计误差的变化情况,每个实验均采用50 次蒙特卡罗(Monte Carlo)实验取平均值。

表4 脉压输出信噪比随极化参数的误差的变化情况Tab.4 Variation of the pulse compression output SNR with the estimation error of polarization parameters
由表4可知,在其他设置保持不变的情况下,极化参数(极化角)的估计误差越大,脉压输出信噪比越低,主瓣干扰抑制的效果越差,当极化参数估计的误差小于10°时,脉压输出信噪比能够保持大于门限值12.5 dB,这说明在此情况下本文方法能有效抑制主瓣干扰并检测出信号;当极化参数估计误差大于10°甚至20°时,本文方法输出信噪比将可能会低于门限值,算法失效。因此为了保证算法的抗干扰效果,极化参数的估计误差不能超过10°,否则算法失效。
5 结论
针对当前抗干扰算法在应对主瓣干扰时存在的不足,本文提出了一种空域-极化域联合斜投影滤波抗干扰方法,首先通过稀疏重构对信号的DOA 进行估计;然后在恒模约束的基础上,通过相关性最大原则对信号的极化参数进行估计;最后构建空域-极化域联合斜投影滤波器对干扰信号进行抑制。
仿真实验表明,本文方法能够有效对抗多个干扰信号,也能有效对抗DOA 与期望信号DOA 相差很小的主瓣干扰信号,最多能够同时对抗两个主瓣干扰信号、三个副瓣干扰信号,同时保留期望信号的相位与幅值信息。与当前流行的方法对比,本方法拥有较高的输出信噪比、较好的DOA 估计能力和较快的运算速度,能够更准确的抑制主瓣干扰信号,更加符合雷达抗干扰的实际要求。