Cn频段卫星导航信号与微波着陆系统电磁兼容性仿真分析
2022-03-07刘瑞华
刘瑞华 李 银 邹 玲
(1.中国民航大学电子信息与自动化学院,天津 300300;2.中国民航大学民航航空器适航审定技术重点实验室,天津 300300)
1 引言
为缓解目前L频段卫星导航信号拥挤的问题,世界无线电通信大会(World Radio Communications Conference,WRC)于2000年,将C频段的5010 MHz~5030 MHz(Cn频段)分配给了卫星导航下行链路信号使用。C频段导航信号的应用对卫星星上载荷要求过高,导致Cn频段卫星导航一度不被看好。随着近年阵列天线等技术日益成熟并得到普遍应用,再加上Cn 频段信号本身具有优秀的抗电离层延迟以及抗多路径性能,Cn频段作为很有潜力的卫星导航候选频段又引起了国内外学者的关注。
此前,欧洲Galileo 系统研究小组对Cn 频段的研究较为深入,并就该频段卫星导航信号调制方式给出建议[1]。中国科学院国家授时中心的卢晓春等人对C 频段卫星导航信号的设计展开了研究,由中国科学院自主研发和应用的中国区域定位系统(China Area Positioning System,CAPS)是一种基于同步轨道(GEO)卫星的转发式卫星导航系统,非常适于承载Cn 频段卫星导航可行性相关试验[2]。Cn频段上边带的5030 MHz~5091 MHz 已由国际标准的微波着陆系统(Microwave Landing System,MLS)主用,Cn频段卫星导航与MLS业务之间的电磁兼容性测试与分析,成为标准化应用Cn频段导航信号计划中必须解决的最关键问题之一[3]。
为了保证MLS作为精密进近引导设备的正常服务,国际民航组织(International Civil Aviation Organization,ICAO)以及国际电信联盟(International Telecommunication Union,ITU)对其制定了明确的保护准则,即规定落在MLS 频带内的功率通量密度(Power flux-density,PFD)不超过相关阈值[4-5]。依据此标准,上海交通大学的牛满仓[6]、刘美红[7]等人计算了采用不同调制方式的GNSS 信号的PFD;而关于MLS信号对卫星导航信号的干扰评估,一般首先考虑干扰信号与期望信号的频谱兼容性,国内尚未有相关研究论文发表。基于干扰场景的建立,本文采用基于谱分离系数(Spectral Separation Coefficient,SSC)的等效载噪比方法,结合空间链路衰减模型,分析计算了MLS信号对Cn频段卫星导航信号的干扰情况,并给出避免有害干扰的所需分离距离,为Cn频段卫星导航信号及接收机的设计与地面站选址提供依据。
2 系统特性及参数
2.1 MLS及其信号体制
MLS 是一种基于时基波束扫描原理的精密进近着陆系统,被ICAO 采纳,主要为民用机场和空军基地提供全天候,甚至恶劣气象条件下的进近着陆服务。采用空中导出数据方法的MLS,由地面设备和机载设备组成,地面设备在其信号覆盖扇区内播发引导信号,位于覆盖扇区内的任意一架搭载了MLS 机载设备的飞机都能接收到引导信号,从而获得自身的位置信息。图1为典型的MLS设备布局以及数据传输链路示意。
由图1 可知,典型的MLS 地面设备布局包括方位台、仰角台以及精密测距机。方位台与仰角台工作在5030 MHz~5091 MHz 频段内的200 个频道上,时分播发带有同步等信息的差分相移键控(Differential Phase Shift Keying,DPSK)数据字信号以及用于飞机确定自身角位置的扫描信号,距离信息由工作在960~1215 MHz的精密测距机提供[8]。
MLS 的DPSK 数据字信号采用ICAO 规定的编码规则,码率为15625 Hz,其功率谱与一般DPSK 信号一致。MLS 扫描信号由阵列天线赋形形成,扫描天线方向图的3 dB波束宽度记为BW(对于方位天线一般采用1°、2°或3°,视跑道长度而定),在仅考虑主瓣的情况下,扫描天线方向图可采用式(1)所示的高斯钟形脉冲建模
式中:k=2ln2,θ为角度。
由于机载端接收到的“往”、“返”扫描信号的包络与高斯信号形状一致,将接收机接收“往”、“返”扫描脉冲包络看作扫描天线方向图在时间轴上的体现[9],结合MLS 扫描信号测角原理,可得扫描信号的时域表达式为
式中:v为波束扫描速率,对于方位引导信号一般20°/ms;则k取2ln2,BW取值为3°。若飞机出现在相对跑道32°,方位天线扫描范围±62°,工作频点为5031 MHz的一对“往”、“返”扫描信号归一化功率谱如图2所示。
2.2 卫星导航系统及其信号体制
作为卫星导航信号的最底层,载波以及载波频率的选择直接影响导航服务的性能。卫星导航信号载频必须为时钟基准频率1.023 MHz 的整数倍,为了给相邻频带主用系统,即射电天文与MLS 留下足够的保护余量,文献[3]指出5022.93 MHz 较为适合作为Cn频带卫星导航信号载波频率。
为了获得较好的带外衰减抑制,采用BPSK(n)调制方式,“n”表示码片速率为n*1.023 MHz。Cn频段带宽只有20 MHz,为了最大限度保留信号主瓣能量,n的取值不超过10。
本文主要研究对象是载波频率为5022.93 MHz,调制方法分别采用BPSK(2)、BPSK(5)和BPSK(10)的卫星导航信号。其时域信号s(t)可以表示为
式中:sI(t)和sQ(t)为I 路和Q 路的伪随机码,fc为载波频率。其对应的理论功率谱可以表示为
式中:Tc为码片速率的倒数,图3 为采用BPSK(2)、BPSK(5)及BPSK(10),载波频率为5022.93 MHz 的卫星导航信号功率谱曲线。
3 干扰场景及功率链路分析
3.1 卫星导航信号对MLS的干扰场景
如图4 所示的一个Cn 频段卫星导航系统下行链路工作频段与MLS 频段相邻,其传输的射频信号可能会对MLS服务造成有害干扰。
卫星导航下行链路信号可以认为是无阻挡开阔空间的自由空间传播,经验公式(5)用于计算下行信号的传输损耗Lf(dB)
式中:d为同步卫星到地球表面距离,单位为km;f为卫星导航下行频率,单位为MHz。则r 点处接收天线所接收到的卫星信号功率Pr为[10]
式中:Pr单位为dBW 或dBm;Gt为卫星发射天线的增益,Gr为用来接收信号的接收天线增益,以dBi为单位;Latm代表值约为2 dB的大气损耗值。
卫星导航信号采用圆极化,信号功率可以由上述链路传播模型计算,通常卫星信号到达地面某点处的功率为-130 dBm~-120 dBm 左右(依据卫星位置而变化)。
3.2 MLS信号对Cn频段卫星导航的干扰场景
假定跑道周围地形平坦开阔,MLS 引导扇区内无明显障碍物,为了评估MLS服务信号对Cn频段卫星导航业务的干扰,建立如图5所示的干扰场景。
除测距机以外,为一条跑道上的飞机提供进近服务的MLS各个地面设备工作在同一频点上,信号传输模型也相同。以进近方位引导信号为例,MLS方位台信号覆盖扇区内,某点处MLS信号功率PR由下式(7)计算
式中:PT为MLS 发射功率,单位为dBW 或dBm;GT为发射天线增益,GR为接收信号的接收天线增益,单位为dBi;Cl为电缆及缆头损耗,PL为路径损耗,单位为dB。
路径损耗PL使用文献[5]中机场传播模型计算,即
式中:n=2.3,d0=462 m,d为距离MLS 天线相位中心的直线距离,单位为km。
MLS 方位引导扇区半径约为41.7 km,在此扇区内方位台发射的DPSK 数据字信号与角度扫描信号(3°波束宽度),发射天线采取不同的增益。由于MLS 发射天线采用线极化,卫星导航信号采用圆极化,信号到达卫星导航接收天线的功率概算还需考虑极化损耗。下表1给出了用于MLS信号功率概算的相关参数及其取值,其中“其他损耗”是可能存在的损耗项,取值均为代表值。
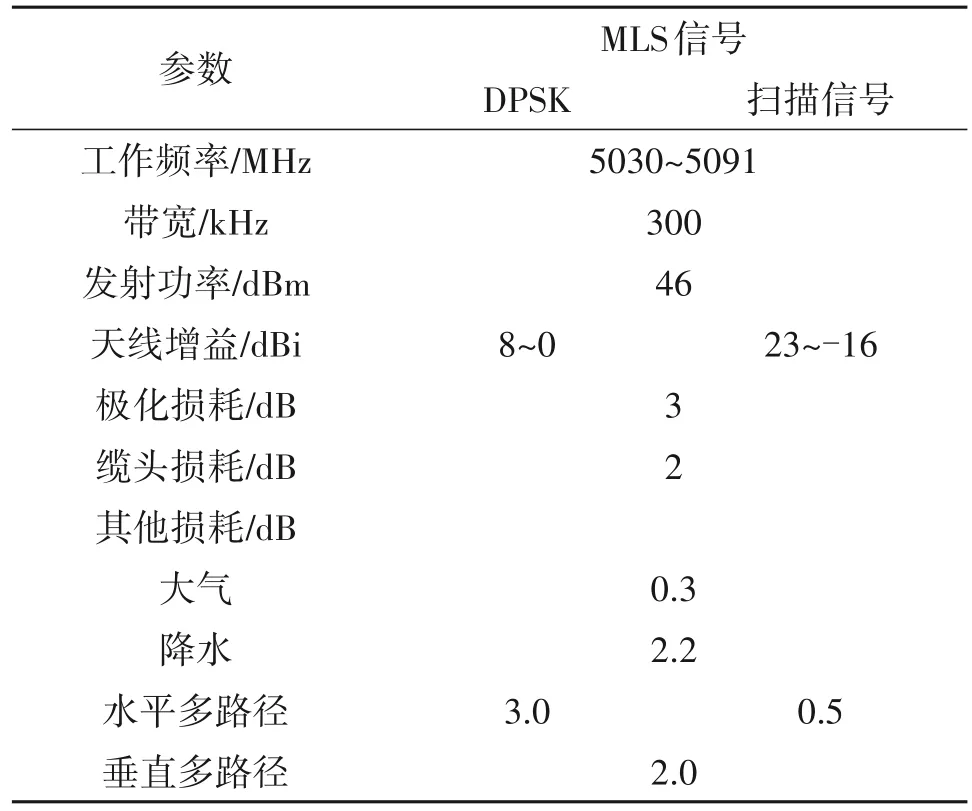
表1 MLS功率概算参数Tab.1 Parameters for MLS signal power estimating
为了保证MLS 的正常服务,《国际民用航空公约—附件10》对MLS信号覆盖扇区内的信号功率密度给出了最低门限。要求所有气象条件下,DPSK数据字信号和扫描信号的功率密度,在覆盖区内的任何一点上,均不得小于下表2所列数值。
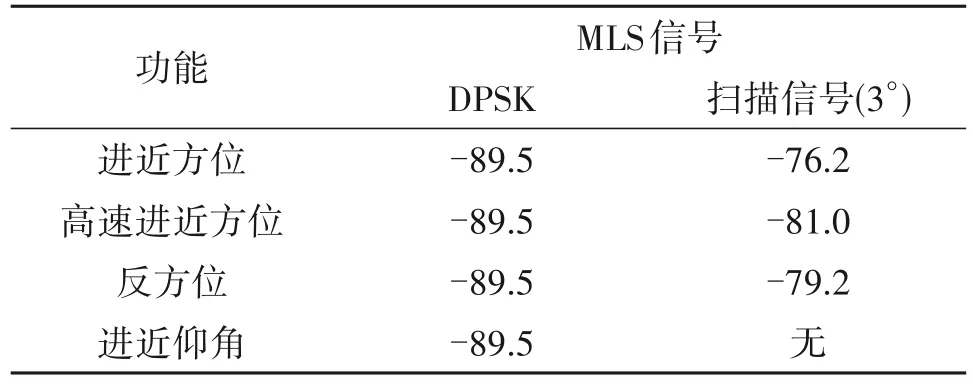
表2 MLS信号最低功率密度(dBW/m2)Tab.2 MLS signal minimum power density(dBW/m2)
本文考虑两业务之间的干扰情况,导航接收机与干扰源之间视作无阻挡。工程应用中,卫星导航接收机一般安装在飞机顶部,到达接收机的MLS 信号功率概算还需考虑机身绕射等影响因素。
4 干扰评估方法
4.1 卫星导航信号对MLS服务的干扰评估
一般情况下,微波着陆系统覆盖区域只在机场和部分航线附近,而卫星导航信号经过长距离空间衰减,到达MLS 接收机时已经非常微弱,但是由于进近着陆与生命安全相关,Cn频段导航信号对MLS系统产生的干扰必须在可接受的范围内。
根据文献[4]、[5],ICAO 给出了MLS 的保护门限,即落在5030 MHz~5091 MHz 上的卫星导航信号在每150 kHz 的总功率通量密度不能超过-124.5 dBW/m2,PFD由式(9)计算
式中:d为地球表面接收机与可见卫星间的距离,单位为km;Latm为服务频段间的大气损耗,一般取0.5 dB;G(f)为Cn 频段卫星导航信号归一化功率谱密度。EIRPs为等效全向辐射功率,由式(10)计算
式中:Lrl为接收机处理损耗,取值为6 dB;N0为热噪声功率密度,一般取值-174 dBm/Hz;Lfr为Cn频段信号的空间传输损耗,单位为dB;Ar为接收端天线增益,单位为dBi;Ltro为对流层衰减,C 频段对流层衰减一般取值为5.9 dB;(Cs/N0)eff为上文2.2 节中Cn频段卫星导航信号在0.1 m 码跟踪精度下的载噪比,单位为dB-Hz,当Cn 频段卫星导航信号落地功率取-120 dBm 时,假定此时码跟踪环路的跟踪精度为0.1 m,对应的载噪比则为54 dB-Hz。
4.2 MLS信号对卫星导航信号的干扰评估
卫星下行接收系统主要由天线、馈源、高频头、传输线缆、功分器以及卫星接收机组成。接收机射频前端处理模块接收到的信号混杂,包括所有可见卫星信号和各种电磁场信号和干扰[11]。
由接收机原理可知,干扰信号会对接收机期望信号的捕获等性能产生影响,而此影响与即时支路有关,可用该支路相关器输出端的信干噪比(Signal to Interference plus Noise Ratio,SNIR)来评价[12-13],即时相关器的原理图如图6所示。
略过即时相关器相干与非相干输出的SNIR 推导过程,将干扰信号作等效白噪声处理,可得即时支路的输出载干噪比ρ为
式中:P0为导航信号功率,PI为干扰信号功率,N0为白噪声功率,单位都为dBW 或dBm;HB(f)为带通滤波器的基带频率特性,计算时设为理想情况;G0(f)是导航信号在预积分时间内的功率谱,GC(f)为本地参考信号的归一化功率谱密度,GI(f)是干扰信号在预积分时间内的功率谱。
不考虑干扰信号时,载噪比ρSNR表示为
则有
同时考虑噪声和干扰时
于是可以给出谱分离系数k的定义式为
式中:Δf为期望信号与干扰信号的频差,单位为MHz。
由式(14)、(15)可得基于谱分离系数k(Δf)的等效载噪比为
谱分离系数表征期望信号与干扰信号频谱重叠程度,是评价电磁兼容性的重要参数之一,本文通过计算该值,从频谱角度评估MLS 信号对卫星导航信号的干扰情况。基于谱分离系数的等效载噪比与相干和非相干处理的即时相关器输出载噪比均呈正比例关系,可以用于评估卫星导航信号捕获性能。本文根据干扰信号不同(MLS DPSK 数据字信号或扫描信号),仿真计算谱分离系数以及等效载噪比值。根据载噪比经验门限,结合干扰信号功率概算,计算避免有害干扰的所需分离距离值。
5 仿真计算结果
5.1 卫星导航信号对MLS干扰结果
假设Cn频段卫星导航系统仿照当前主流GNSS组网星座结构,如我国BDS-3 卫星导航系统,包括:3颗GEO卫星(分别位于80°E、110.5°E以及140°E)、3 颗IGSO 卫星和24 颗MEO 卫星,Walker 构型为24/3/1。下行信号采用BPSK(2)、BPSK(5)和BPSK(10)三种调制方式,载波频率为5022.93 MHz。当MLS信号中心频点为5031 MHz时,令可见星数目为13 颗,卫星信号落地功率最大值为-120 dBm,下表记录了相应PFD最大值。
根据表3计算结果,采用上述星座结构以及信号体制的Cn 频段卫星导航信号,落在MLS 带内每150 kHz上的功率通量密度最大值小于ICAO给出的保护阈值,不会对国际标准的MLS造成有害干扰。
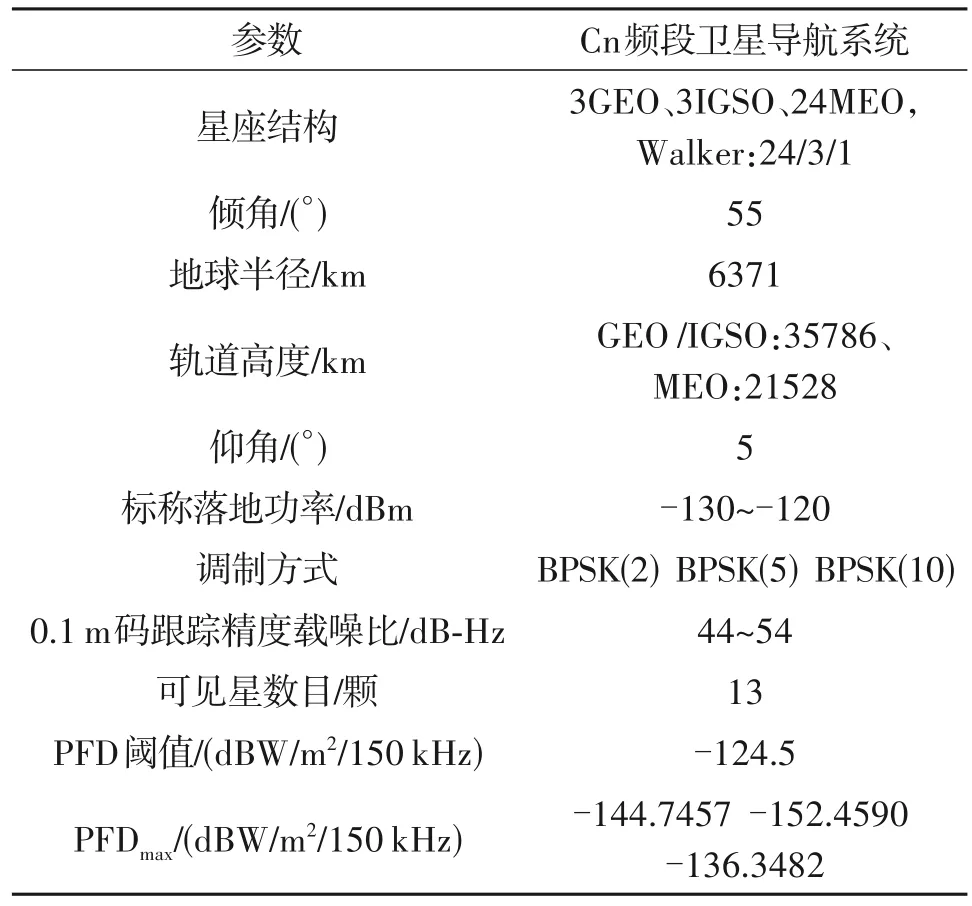
表3 卫星星座结构及PFD计算值Tab.3 Constellation model and PFD results
5.2 MLS信号对卫星导航信号干扰结果
计算谱分离系数以及等效载噪比时,MLS 信号作为干扰信号应分为两类,即DPSK数据字信号和扫描信号。前者最长持续时间为9.3~15 ms,后者根据其产生原理,可以归类为高增益窄带连续波干扰。
MLS 信号发射端使用的带通滤波器带宽较大(通带一般为60 MHz 以上),在考虑与Cn 频段电磁兼容性时,滤波器带外抑制可以忽略。
1)基于谱分离系数的等效载噪比
干扰信号为MLS DPSK 信号。输入条件:MLS工作频点取5031 MHz,卫星导航信号载波频率为5022.93 MHz。假定热噪声功率密度为-174 dBm/Hz,卫星信号落地功率取-130 dBm。MLS 方位天线对DPSK 数据字信号的增益取值为4 dBi,接收机前端滤波器带宽取主瓣带宽。
采用BPSK(2)/BPSK(5)/BPSK(10)三种调制方式的导航信号,与MLS DPSK 信号的谱分离系数分别为-89.0566/-88.4754/-61.7358。图7 和图8 绘制了基于谱分离系数的等效载噪比随MLS 信号功率以及分离距离变化曲线。
图7、图8 的仿真结果表明,等效载噪比随着干扰信号(DPSK)功率的增加总体呈下降趋势,以接收机满足最低载噪比门限33 dB-Hz 为标准,采用BPSK(10)的导航信号可以承受的最高干扰信号功率约为-101.6 dBm,此时导航接收机与MLS 天线相位中心所需分离距离为100 km,这意味着在100 km以内的卫星导航接收机将无法正常服务;而采用BPSK(2)和BPSK(5)的导航信号接收机对应的所需分离距离为6~7 km,比BPSK(10)表现更好。
干扰信号为MLS 扫描信号。输入条件:扫描信号波束宽度为3°,长度为13 ms,飞机出现在相对跑道32°。方位天线对角度扫描信号的增益取值为15 dBi,接收机前端滤波器带宽取主瓣带宽。
采用BPSK(2)/BPSK(5)/BPSK(10)三种调制方式的导航信号,与MLS 扫描信号的谱分离系数分别为-371.6177/-363.4915/-61.7502。图9 和图10 计算了基于谱分离系数的等效载噪比随干扰信号功率以及分离距离变化曲线。
图9 与图10 所示的仿真计算结果表明,扫描信号与导航信号的谱分离值较低,两信号频谱重叠程度低。这是因为相对于导航信号,“往”、“返”扫描信号为窄脉冲,此时使用BPSK(2)和BPSK(5)调制的导航信号几乎不会受到扫描信号的有害干扰。但是发射天线对扫描信号采用高增益发射,导致MLS扇区内扫描信号功率值较大,BPSK(10)调制的导航信号接收机需要与之保持超过200 km 的地理间隔才能免受有害干扰。
2)遍历MLS工作频点的仿真结果
MLS 的工作带宽很宽,扩展模式下可以达到5030 MHz~5150 MHz,可以应用的频点众多。为了确认改变MLS工作频点对频谱兼容性的影响,图11与图12 分别绘制了MLS DPSK 信号与扫描信号遍历5030 MHz~5061 MHz 工作频点时,谱分离系数的变化曲线,接收机前端滤波器带宽取40 MHz。
由图11 和图12 可以看出,随着MLS 工作频率的右移,采用BPSK(2)、BPSK(5)及BPSK(10)三种调制方式的导航信号与干扰信号的谱分离系数计算值总体呈下降趋势。采用BPSK(2)时,谱分离曲线具有多谷值特性,且谱分离值整体偏低,说明采用BPSK(2)的导航信号与干扰信号的频谱重叠程度较低,MLS可以应用的频点也更多。
为了保证接收机性能,除了改进卫星导航信号体制,通常采用一定的分离距离来使干扰信号功率衰减到安全值以内。图13 与图14 仿真了MLS 工作频点在5030 MHz~5045 MHz 范围内,所需分离距离值的变化曲线。
仿真结果表明,相同的MLS工作频点条件下,仍然是采用BPSK(2)调制方法最优,所需分离距离整体低于其余两种调制方式。当MLS信号工作频点在5033~5034 MHz之内时,采用三种不同调制方式的导航系统受到干扰最弱,此时MLS地面台址与卫星导航接收机选址即使非常靠近,也不会影响导航接收机的工作。
3)接收机前端滤波器带宽
接收机前端滤波器采用不同的通带与阻带,会对频谱兼容性造成影响。图15与图16仿真计算了不同接收机前端滤波器带宽下,基于谱分离系数的等效载噪比变化曲线。输入条件:MLS与导航信号分别工作在5031 MHz 与5022.93 MHz,导航信号落地功率为-130 dBm,假定卫星导航接收机距离干扰源20 km。
图15与图16的仿真结果表明,当使用的接收机前端滤波器带宽低于16 MHz左右时,等效载噪比性能较好,这是因为此时干扰信号的频谱主瓣未能落在导航信号带内。随着带宽增大,超过两信号之间的两倍频偏时,载噪比性能下降比较明显。由于相对于卫星导航信号,MLS信号频带很窄,所以滤波器的滚降系数对谱分离系数计算结果影响不大。
4)窄带干扰引起的载噪比降级
相对于其他场所,机场跑道环境频率相对纯净,除MLS 信号之外的杂波干扰较少。常见的宽带干扰为加性高斯干扰,在式(16)中体现为功率为N0的噪声项;测试环境中可能存在的窄带干扰有单频干扰等形式,可能会影响兼容性评估结果。
假定接收机处于静止状态,即不考虑多普勒频移,令一单频窄带干扰信号发射频率与导航信号一致,为5022.93 MHz,干扰带宽为100 kHz(小于导航信号带宽的10%),功率为-91 dBm;导航信号落地功率-130 dBm,接收机前端滤波器带宽取主瓣带宽。若上述单频杂波与MLS 信号同时落入导航接收机带内,与没有该干扰信号时相比,图17 与图18给出了导航接收机的等效载噪比变化情况。
由图17 与图18 的仿真结果可以看出,当同频单音窄带干扰发生,且功率达到一定水平,导航接收机的等效载噪比性能明显降低。设置的窄带干扰对采用BPSK(10)调制的导航信号接收影响较大,可以引起超过5 dB-Hz 的接收机等效载噪比损失。在实际测试安装环境下,应当尽量排除跑道环境中的非MLS 发射窄带干扰源,以免影响两系统兼容性评估的可靠性。
6 结论
通过对Cn 频段卫星导航信号与MLS 信号的频谱兼容性评估,计算了两信号在不同干扰场景下的干扰结果。结合仿真分析得出以下结论。
1)从频谱兼容性来看,PFD 计算结果表明:采用BPSK(2)、BPSK(5)和BPSK(10)三种调制方式的Cn 频段卫星导航信号不会对国际标准的MLS 造成有害干扰。
2)仿真结果表明,与BPSK(5)和BPSK(10)相比,采用BPSK(2)的Cn频段卫星导航信号具有较好的谱分离度以及等效载噪比表现,采用其他调制方式的导航信号表现如何需要进一步分析。
3)MLS 的工作频段宽,频道数目多,这为改善其与Cn 频段卫星导航系统的电磁兼容性提供了可能。选取合理的MLS 工作频点是避免有害干扰的重要手段。
4)若Cn 频段卫星导航系统与MLS 的频率选择余地不大,可以通过增加分离距离来避免有害干扰。分析与计算结果表明,MLS播发的两种信号对分离距离的要求不同;相同条件下,导航信号采用不同的调制方式,所需分离距离也不同。在设备选址时,需要综合考虑以上两个因素,以保证两系统的正常服务。
5)卫星导航信号接收机前端滤波器的通、阻带带宽以及滚降因子也会影响两信号的谱分离系数计算结果,从而影响信号的捕获性能。对Cn频段导航信号采用合适的前端滤波,可以明显降低MLS 信号对Cn频段下行导航信号的干扰。
针对Cn 频段卫星导航业务信号与MLS 服务信号的频谱兼容性,本文进行了理论研究。所取得的研究结果是Cn 频段卫星导航系统与邻频其他主用系统兼容互操作论证的重要组成部分。接下来应当结合实际测试,在充分考虑实际系统安装环境的频率纯净度的前提下,测量验证两系统电磁兼容性,为Cn 频段卫星导航系统研究,以及Cn 频段卫星导航系统在MLS 场地中的布署提供技术参考。