移动测量系统在自动驾驶高精度测图的工程实践
2022-03-06翟成森
翟成森
(山东省国土测绘院,山东 济南 250013)
1 引 言
车载移动测量技术是当今测绘界最为前沿的科技之一,通过GPS、惯导系统与激光扫描仪、全景相机等设备进行整合,获得有精确位置信息的三维点云数据以及全景影像数据。进一步进行数据融合处理后,激光点云与全景影像精确配准,计算出点云所对应全景图上像点的像素坐标,从而实现具备影像地理参考的可量测全景影像。基于可量测全景影像,可以准确有效地提取高精度电子地图项目中多需的各类地形地物要素,在高精度电子地图的应用中具有不可比拟的优势。
本文将移动测量系统应用于高精度电子地图工程实践,对其中涉及的关键技术和工作方法进行探讨和总结,并对实验区的数据进行检验。
2 移动测量系统
2.1 系统介绍
本文研究的车载移动测量系统采购自北京四维远见信息技术有限公司,该系统集成了激光扫描仪、组合导航系统、卫星接收机、数码相机等传感器,以改装后全顺客车为搭载平台,改装后的平台免拆卸,人工操作自动升降,最大限度减小系统带来的误差影响。系统构成如图1所示。
其系统主要传感器技术指标如表1所示。

图1 车载移动测量系统
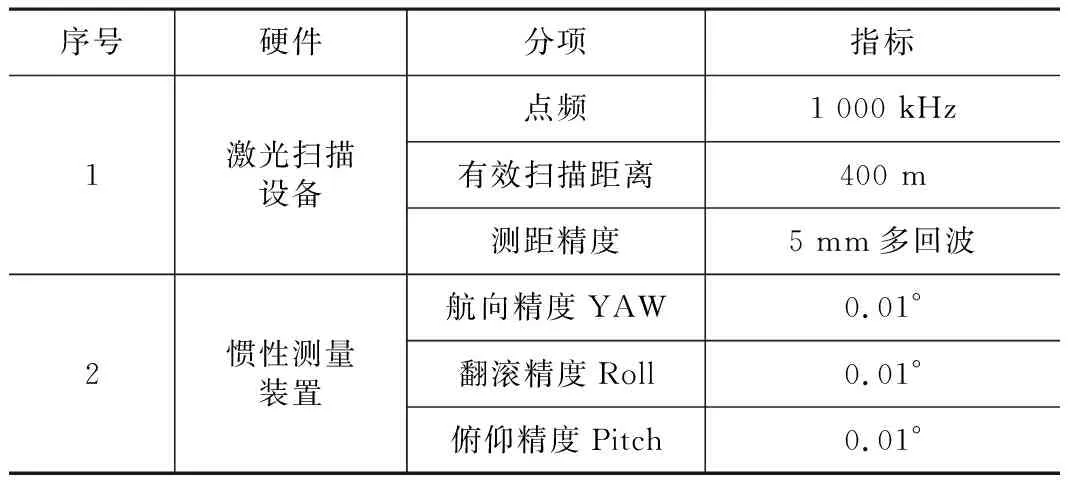
系统传感器技术指标 表1
2.2 误差来源
车载移动测量系统的系统测量误差主要有:POS定姿定位误差、激光扫描测距测角误差和系统集成误差,这三项误差受限于系统硬件的工艺水平。在实际运行中具体会有因拐弯、颠簸、建筑物遮挡、基站坐标、与基站距离而产生的误差,在作业中需着重注意。
3 工程实践
3.1 测区概况
本文测区选择山东省泰安市,此区域道路为双向4车道,路况较好,没有辅道,交通标线清楚,路边有路灯、交通标志牌、斑马线、行车线等,长度大约 20 km。为提高测量精度,此次车载移动测量采用设置基站的方式进行,现场设置一个E级GNSS基准站,整个数据采集过程中采用不大于 40 km/h速度进行。其作业流程主要包括获取组合导航数据(基站和车载GPS数据,IMU数据)和激光点云数据,激光点云数据预处理以及激光点云数据的生成和提取等。具体作业流程如图2所示。
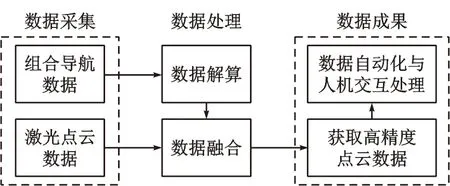
图2 数据处理流程图
3.2 数据采集及数据解算
为保证采集过程中达到最好的效果,在车载移动测量系统进行采集之前,应提前规划采集线路,采集中尽量沿着采集规划线路进行采集。在采集之后,迅速收集基站数据、流动站数据、IMU数据、激光点云文件、多镜头相机文件、里程计文件等,在GPS、IMU组合导航计算的基础上,生成点云数据等成果。如图3所示。
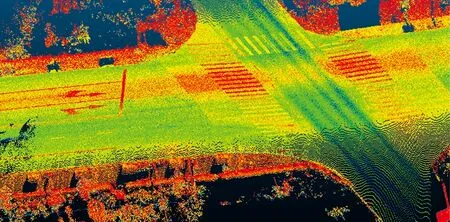
图3 生成的点云数据
3.3 高精度电子地图的快速绘制
本文主要利用北京思维远见信息技术有限公司研制的SSW系统SWDY软件进行道路边线、交通标识线的一键提取,然后对提取对象进行人机交互矢量编辑,对提取错误或者未提取的对象进行修改和补充,对软件无法自动提取的交通标志、路灯等杆状物进行人工矢量编辑,最终完成高精度电子地图的生产工作。处理完成高精地图如图4所示。
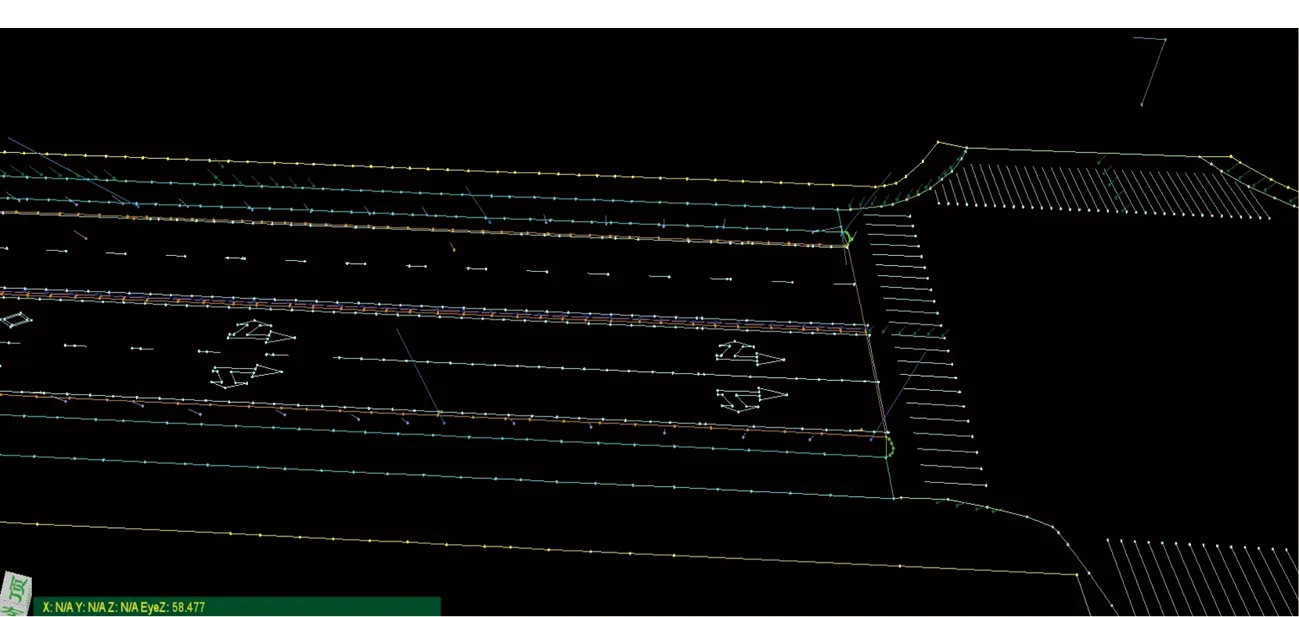
图4 高精度电子地图
3.4 精度分析
为评定基于车载移动测量系统采集的点云精度,本文中用RTK采集部分交通标线特征点并导入点云数据,比较两者坐标的差值检测点云数据的精度,精度检测情况具体如表2所示。
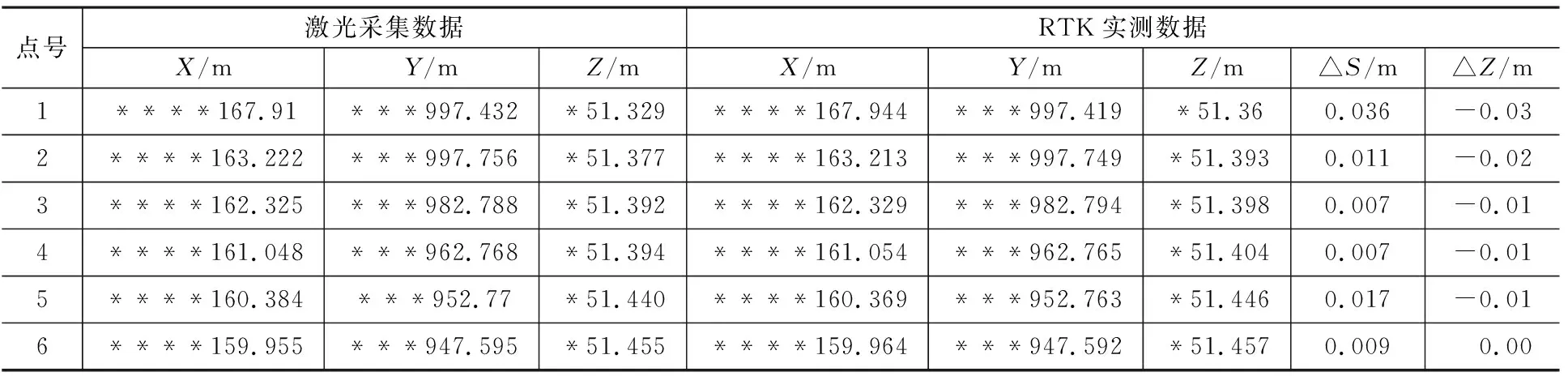
激光采集数据精度检测表 表2

续表2
从表2数据可以看出,车载移动测量系统获得的激光点云数据精度较高,完全能够满足厘米级高精度地图的使用,在实际应用过程中,相比于传统的测量设备,移动测量系统可以快速安全地完成线性要素的数据采集工作,将大量的外业工作进行转化为内业工作,在高精度电子地图中具有重要的应用。
4 移动测量系统观测成果分析与比较
4.1 基站与CORS方式对比
移动测量系统在进行作业时除利用架设基站之外,还可以使用CORS来进行测量,不同的是,CORS的采样间隔为 1 s,且不需要专人看守基站,而架设基站可以根据需要进一步提高数据精度,缩短采样间隔时间(本次实验采用采样间隔为 0.1 s),且需要专人值守。为进一步比较对采用基站与CORS的作业方式,本次实验CORS网最邻近基站方圆 15 km之内,采用架设单基站方式作业区域为单基站方圆 15 km区域,进行解算,并与RTK实测数据进行对比,分析两者的平面、高程的差值,结果如表3所示。

基站与CORS数据的对比分析 表3
由表3可以看出,采用CORS方式采集数据精度比使用基站方式精度稍差,但是也能满足厘米级别,基本符合高精地图的需要。
4.2 移动测量与RTK实测工效方面的比较
在当前大规模数据生产的压力下,工效的对比是最直接的因素,在达到自动驾驶高精度电子地图生产需要的基础上,我们需要对车载移动测量系统与传统GPS-RTK测量的工作效率进行对比,了解两者在时间效率上的关系,根据生产实际,GPS-RTK测量一个作业组一般两个人,外加一部车和一位驾驶员。移动测量则主要实际看基站一人,数据采集两人,一名驾驶员。两者详细对比情况如表4所示。
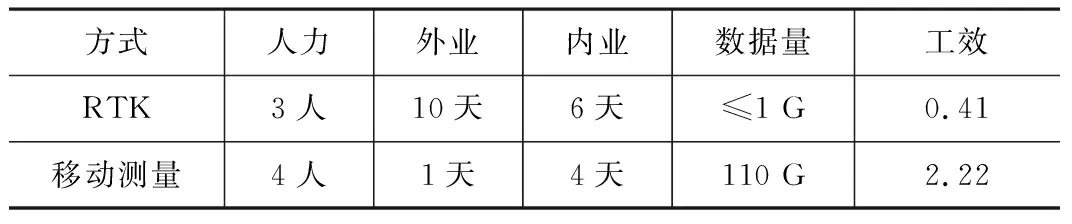
车载移动测量系统与GPSRTK工效对比关系(以20 km为计算标准) 表4
在实际工作中,移动测量车在外业工作中采集的数据量较多、较大,在内业数据计算方面耗费的时间较长,但结合SWDY系统的道路附属标线的自动提取功能,再进行矢量编辑的时候可以省一些时间,总体上内业比RTK测量直接编辑要用的时间较少。通过表4我们也可以看出,在这种线状高精度电子地图的采集方面,移动测量系统比传统RTK采集方式工效至少提高5倍以上。
5 结 语
车载移动系统具有高精度、高效率的特点,它所获取的数据能够适应自动驾驶高精度导航高精度电子地图的需要,本文通过工程实践,详细说明车载移动系统应用于高精度电子地图的生产的可能并进行精度评定,同时针对传统RTK测图方式与移动测量系统测图方式进行对比,从人力、数据量、工效等方面进行对比,事实证明,移动测量系统能够满足自动驾驶高精度地图生产的需要且具有较高效率。
