基于激光扫描的隧道超欠挖量检测方法
2022-03-06郑祥乐
郑祥乐
(新疆额河建管局,新疆 乌鲁木齐 830000)
1 引 言
随着经济高速发展和人口密度不断增大,地下空间作为一种固有资源逐渐被国家所重视[1],隧道作为地下空间的重要组成部分,其施工过程的各类问题也逐渐受到广泛关注。钻爆法是隧道开挖的主要方法之一,其开挖过程中不可避免会产生隧道的超欠挖,不仅影响施工进度,还严重威胁施工人员的身体安全[2~4],因此需要对隧道超欠挖进行有效的检测。传统使用全站仪测量超欠挖,只能测量截面有限的点,而且只能依靠施工人员的经验,检测时间过久,拖延施工进度。随着科学技术的不断创新,各工程领域都在使用激光扫描仪进行测量[5~8],本文以二维激光扫描仪和车载云台为主搭建三维扫描装置,提出了一种基于激光点云的隧道超欠挖检测方法,可以快速检测隧道截面超欠挖情况,对隧道爆破成型质量评估具有一定的指导作用。
2 隧道超欠挖量检测方法
采用钻爆法施工,隧道空旷、无遮挡物,可以使用基于激光点云的隧道超欠挖检测方法。其方法思想是:通过三维扫描装置多次设站扫描获取整个隧道的三维点云数据,通过全站仪将所有位置扫描的点云转换到同一大地坐标系下,运用投影法和RANSAC算法计算隧道的中轴线,提取隧道截面,将截面内点云转换到xoy面中,将各点到隧道截面圆心的距离与理论半径对比,获取隧道截面的超挖区域与欠挖区域,运用微元的思想计算各区域内的超(欠)挖量。
2.1 隧道三维点云数据的获取
本文使用的三维扫描装置主要由德国SICK公司LMS511二维激光扫描仪和车载云台组成。如图1所示。LMS511二维激光扫描仪通过发送与接收激光脉冲的时间差,计算出2D轮廓,其固定在车载云台顶板,通过Ethernet接口向计算机传输点云数据,I/O线与车载云台相连,接收车载云台内部旋转编码器的信息。从而得到点云的三维坐标(x,y,z)

(1)
式中,d是激光点到扫描仪激光发射器的距离,β是单次扫描截面中激光点与水平线的夹角,θ是车载云台从竖直方向旋转的角度,l是扫描仪激光发射器到车载云台转轴中心的距离。
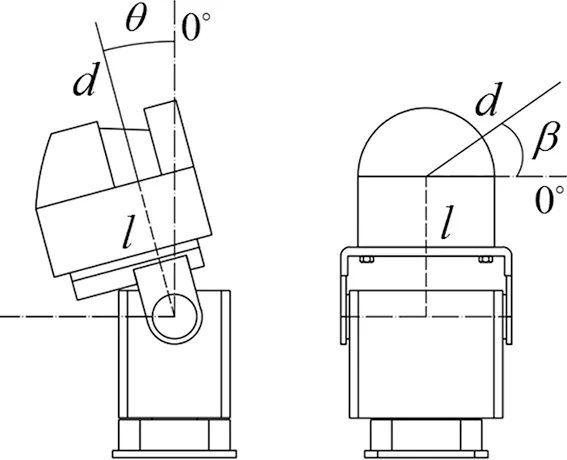
图1 三维扫描装置
2.2 坐标统一
在三维扫描装置多次采集点云的过程中,由于每次扫描位置不同,其点云数据所处的坐标系也不同,因此需要将所有获取的扫描坐标系下三维点云数据转换到同一大地坐标系三维点云数据下。实际工作中,在每次三维扫描装置获取点云数据前,使用全站仪对其定位,计算坐标系原点所处大地坐标系下的位置(x0,y0,z0),以及三维扫描装置坐标系的y轴方向向量(x1,y1,z1)和x轴方向向量(x2,y2,z2),如图2所示。其中,坐标系o-xyz是大地坐标系,坐标系o′-x′y′z′是扫描坐标系。
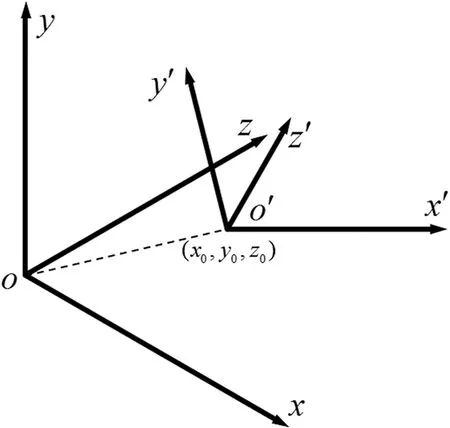
图2 扫描坐标系的位置
(2)

θ为扫描坐标系绕z轴旋转的角度,为α扫描坐标系绕x轴旋转的角度,γ为扫描坐标系旋转的角度。
2.3 隧道超欠挖计算
完成三维点云数据的大地坐标转换后,需要确定隧道轴线方向,方可进行下一步提取隧道截面进而计算超欠挖。在大地坐标系下,按隧道前进方向(z轴正方向)截取一定距离的点云数据,计算所有点云的单位向量,将所有单位向量映射到高斯球面上,采用最小二乘平面拟合高斯球上的大圆面,计算该平面的法向量,其为该段隧道点云数据的隧道轴线方向[9]。
由于隧道轴线方向只是隧道截面的法向量,无法得出隧道轴线的空间方程,因此需要计算每个截面的圆心,通过圆心位置拟合隧道轴线的空间位置。在整个隧道模型中每间隔1cm提取一个隧道截面,由于空间点云随机分布,截面上的点云较少,所以将相距截面 1 mm范围v内的点云数据都纳入这个截面中,使用半径滤波器对该截面上的点云数据滤波,去除隧道点云的离散点,使用RANSAC算法拟合截面上点云的圆心坐标,将所有截面上的圆心点分别投影到大地坐标系xoz面和yoz面,并按隧道前进方向(z轴正方向)排序,在xoz面和yoz面上使用三次样条插值拟合圆心点的曲线,等比例在两条曲线上取相同数量的点,将两条曲线上对应z坐标的点转换成三维坐标,得到整个隧道轴线的空间位置。
得到隧道截面圆心点后,可以计算点云的实际隧道半径,对比点云的实际半径与理论半径,从而得到隧道截面的超欠挖量。根据隧道截面的法向量将其点云转换到xoy面中,以逆时针方向将实际点云进行排序(最右下的点是第1个点,最左下的点是第n个点),并将其相邻前后两个点相连,在同一平面中画出隧道理论轮廓曲线,如图4所示,计算实际点云到隧道理论轮廓曲线的距离d:
(3)
式中,xxoy,yxoy是截面中实际点云的坐标,xr,yr是截面圆心的坐标,r0是隧道理论半径,d>0表示实际点在隧道理论轮廓线外,d<0表示实际点在隧道理论轮廓线内。实际点在隧道理论轮廓线外表示隧道在这片区域内出现超挖,实际点在隧道理论轮廓线内表示隧道在这片区域内出现欠挖。
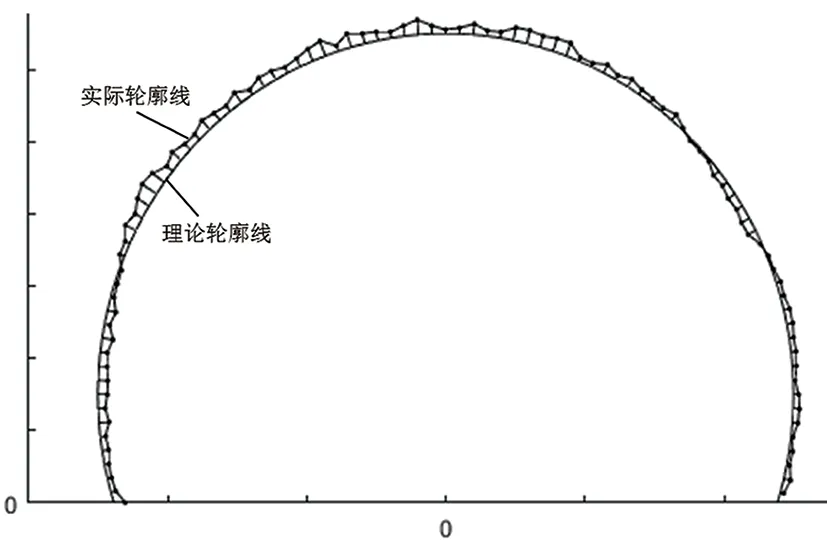
图3 点云到理论隧道轮廓
每个截面中均有密集的点云,运用微元的思想计算隧道截面超欠挖量,由于实际点云到隧道理论轮廓曲线的距离远小于隧道理论半径,因此可以将相邻两点到隧道理论轮廓的直线等价于平行且垂直于理论轮廓线,如图5所示,A、B是截面点云中相邻两点,C、D是A、B两点与理论轮廓线的垂足,A、B、C、D组成一个直角梯形。
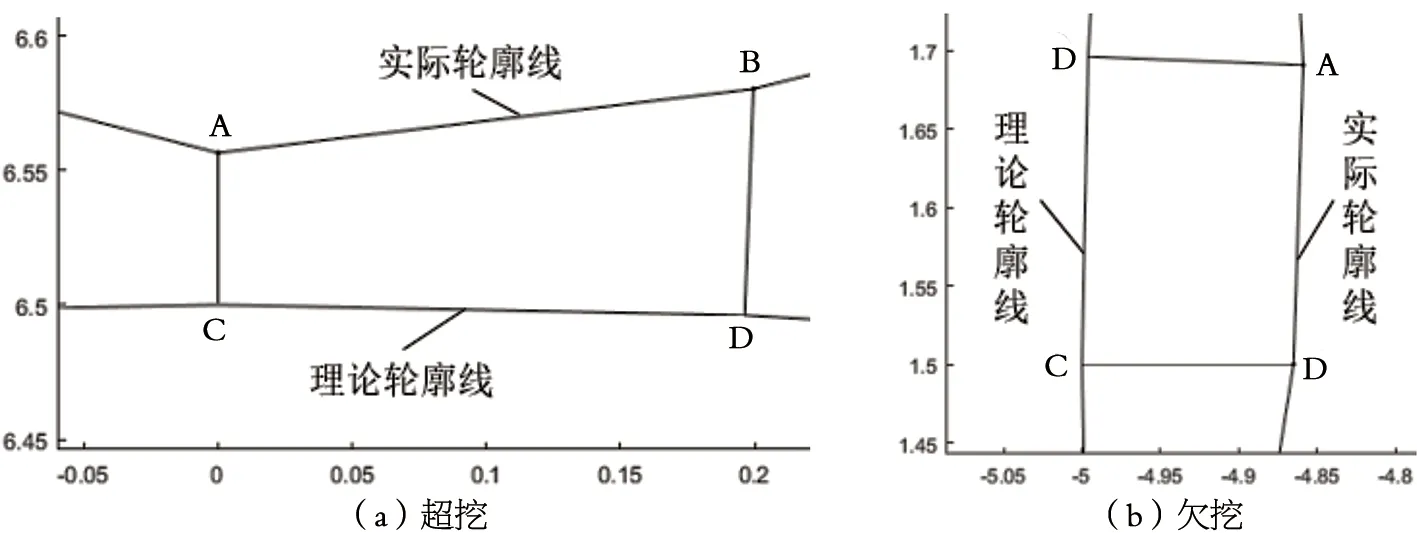
图4 相邻两点超欠挖量计算
计算一个微元的超挖(欠挖)量(即上述梯形的面积):
(4)
(5)
其中,dA、dB是A、B两点到隧道理论轮廓曲线的距离,hCD是微元直角梯形中的高,(xA,yA)、(xB,yB)是A、B在截面中的坐标,超挖时△S>0,欠挖时△S<0。
遍历截面上所有点,对比相邻两点d的符号,若两点的符号相反:dj*dj+1<0(j表示第j个点),则提取这两点,将第1个点到第j个点标记为超挖区域1(欠挖区域1),将第j个点到第j+m个点隧道为欠挖区域1(超挖区域1),以此类推,如表1所示:
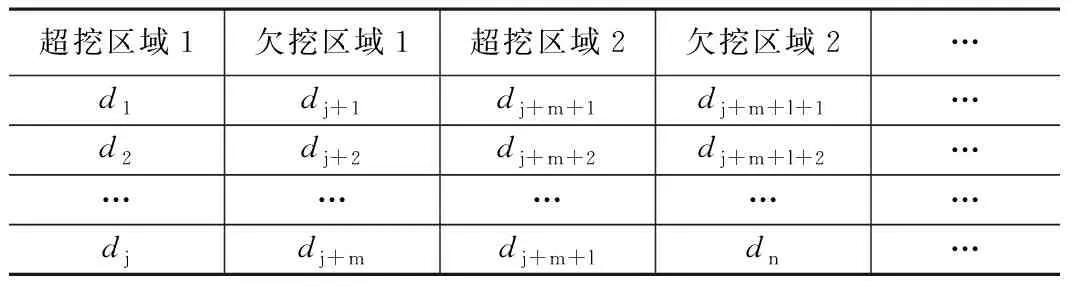
隧道截面超欠挖区域 表1
相邻两点的符号相反,其处于不同的区域内,如图5所示。

图5 超挖与欠挖邻近点计算
其微元的超挖(欠挖)量计算如下:
(6)
(7)
(8)
其中,lAE是线段CD平移后的距离,△S2A是前一个点的超挖(欠挖)量,△S2B是后一个点的欠挖(超挖)量。
3 结 论
本文基于二维激光扫描仪和车载云台搭建了一个三维扫描装置,通过车载云台带动二维扫描仪运动,将二维点云转换成高密度的三维点云数据。对各位置的点云数据进行大地坐标转换,实现所有三维点云数据的坐标系统一。并基于三维点云数据提出了一种简单高效的矿山隧道超欠挖计算模型,通过对各超挖和欠挖区域的定位及超挖量和欠挖量的计算,可对隧道爆破质量进行初步评估,实现隧道快速智能检测,提高隧道检测效率。
