车载移动激光扫描在道路改扩建中的应用
2022-03-06谈嵘纪思源曹媛媛
谈嵘,纪思源,曹媛媛
(常州市测绘院,江苏 常州 213001)
1 引 言
随着城市的发展,道路的改扩建测量需求不断扩大,传统作业方式主要使用全站仪和水准仪结合,采集道路断面高程和二维平面地形图数据信息,再根据项目需求提取所需点位三维信息,劳动强度大,作业效率低。与此同时,由于缺乏精确的细部特征和高密度的DEM支持,无法为后续的三维规划提供依据,在高速和高架等路段数据获取方面也具有一定危险性[1]。车载移动激光扫描测量系统采用非接触主动测量方式,自动化程度高、机动灵活、周期短、高分辨率、高精度、实时获取多源三维空间数据等优势[2,3],为道路改扩建、竣工验收测量等,提供完善的解决方案。
2 技术流程
本文经工程实例研究,将技术流程总结如图1所示:

图1 技术流程
3 工程实例
本实验选择常州某地道路改扩建项目为案例,使用Leica Pegasus Two Ultimate车载激光扫描仪,该型号仪器搭配Z+F断面仪,测距精度 1 mm,最大扫描距离 119 m,每秒扫描101万点,配备 2 400万全景相机系统,GNSS失锁 10 s后,水平误差 0.02 m,高程误差 0.02 m,俯仰角/滚动角误差0.008°,朝向角误差0.013°。
3.1 外业采集
车载移动激光扫描系统由激光扫描仪、数码全景相机、高精度差分POS系统等组成[4],GNSS获取位置信息,惯导IMU获取姿态和加速度参数,里程计DMI修正惯导IMU姿态漂移,通过同步触发装置,激光点云与全景照片通过GNSS时间进行同步匹配,根据数码相机与激光扫描仪的固定刚体几何关系,多传感器数据的融合处理,获取真彩色点云和全景相片。
外业数据采集时需注意事项:
(1)选择视野良好的开阔区域进行初始化;
(2)对于可能存在的GNSS信号失锁和干扰区域快速通过;
(3)在车辆行驶过程中,车辆尽量控制匀速行驶,在失锁的临界位置,避免车身抖动过大,保证车辆在行驶过程中的连贯性,确保获取的点云数据的完整和连续性;
(4)尽量避开人流和车辆高峰。
考虑到不同时段GNSS信号差异及地物遮挡因素,为保证获取最优的数据成果,分别对双向车道进行单向的两次测量[5]。

图2 作业区域 图3 作业轨迹
图2为此次实验作业区域,路线长度 2.3 km,实际作业时采用往返测量,保证数据的完整性,分8段轨迹,最长轨迹长度 1.68 km,最短轨迹长度 0.36 km,平均长度 1.09 km,总长度 8.73 km,拍照间隔为 3 m,图3所示为此次作业按照GNSS时间生成轨迹。
3.2 轨迹解算
车载激光扫描的点云数据和具有内外方位元素的照片是根据车辆作业轨迹生成的,因此,轨迹解算的精度直接影响后期生成的点云数据的准确度。
轨迹解算需要DMI、IMU、车载GNSS、基站GNSS数据联合解算[6]。作业时需测量里程计DMI相对于仪器相位中心的改正数,同时记录轮胎周长;基站数据选择覆盖本次作业时间段的常州CORS基准站数据作为后差分计算的基准数据。
轨迹解算采用Inertial Explore软件,分别导入里程计、惯导、移动GNSS数据和基站数据,在导入基站数据时,需根据架设的基站类型,选择相应的天线,以及天线至基站相位中心的改正数,否则轨迹会出现整个向上或向下平移,导致最终生成的激光点云数据出现偏差。
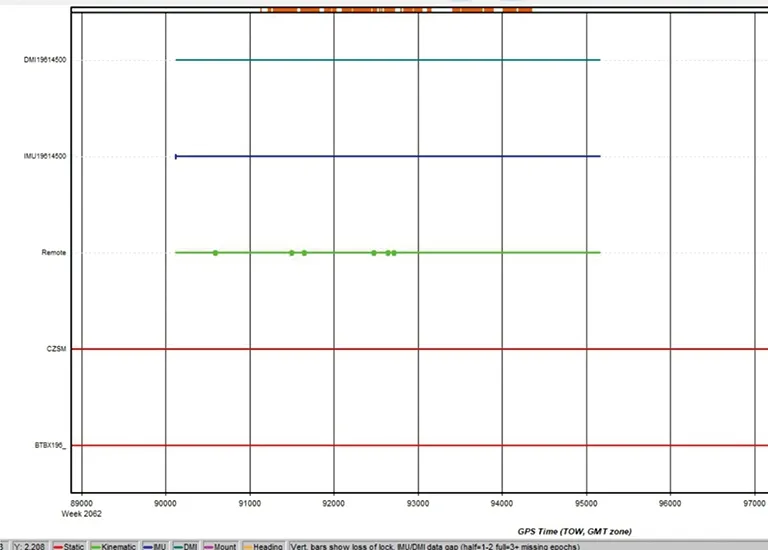
图4 数据覆盖性检查
图4中CZSM和BTBX为基站数据,第一至第三行分别对应DMI、IMU、车载GNSS数据。
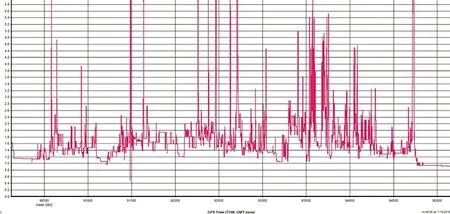
图5 车载GNSS_PDOP值
由图5可以看出PDOP平均值为1.726,中误差为2.485,标准差值为1.788,此次作业范围内环境对车载GNSS信号有一定的影响。
图6所示为各点位的位置精度,具体误差如图7所示:

图6 三方向精度统计

图7 三方向误差统计结果
平面最大误差均在5 mm以内,三方向最大误差小于 1 cm,标准差为 1.79 mm,解算的轨迹结果可以作为下一步生成点云和全景影像的依据。
3.3 真彩色点云生产
外业数据采集时,激光点云和影像数据采用压缩方式保存,内业需根据解算好的轨迹生成点云和影像。生产真彩色点云按照以下步骤:
(1)生成激光点云(此步骤建议不需要生产真彩色点云,节约时间和计算机存储空间);
(2)重复测量路段,即轨迹交叉重复路段,需要进行重复轨迹纠正,避免相同区域不同轨迹生成的点云出现分层情况;
(3)时间同步匹配,通过GNSS时间建立全景照片和激光点云的对应关系,导入纠正后轨迹,再根据全景相机和扫描仪的几何关系,生成真彩色点云。
3.4 重复轨迹纠正
重复轨迹纠正必须要有重复扫描的路线和区域,比如“井”字形交叉,或者往返重复扫描;点云要有重叠;目前适用于相对偏差不太大、地形特征明显的情况,如偏差不超过 30 cm,方形特征物等,采用三维点云自动匹配方法。
主要步骤如下:
(1)寻找多次经过重复扫描的同名点,计算完成后,同名点会以蓝色三角点显示在轨迹上;
(2)计算同名点之间的相对位置偏差;
(3)进行整体纠正迭代运算,计算残差,生成纠正后的轨迹;
(4)依据纠正后的轨迹生成真彩色点云。
经重复轨迹计算后得到的同名点(图8、图9):
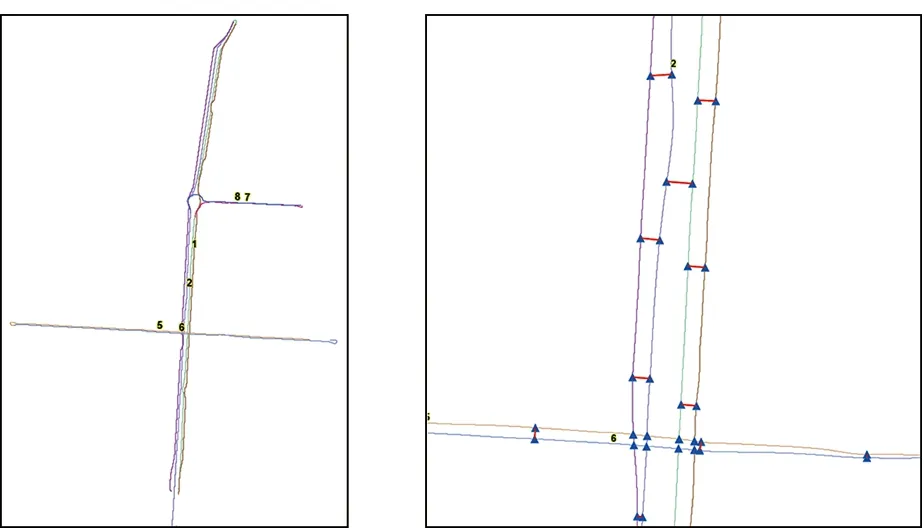
图8 车载轨迹路线图 图9 重复轨迹同名点匹配
3.5 精度控制
为了进一步验证数据的有效性,在外业采集时,在路面布设标靶纸[7],主要作用有两点:①检查车载点云解算精度;②纠正偏差较大的点云轨迹。采用RTK测量靶心的平面坐标,高程采用四等水准联测成果,如图10、图11所示,共布设7个检查点:

图10标靶控制与检核点 图11控制点点位分布
图12(a)、(b)所示即为本次作业区域生成的最终真彩色点云数据:

图12 真彩色激光点云数据
4 作业效率比对
本次实验选择的道路分别按照全野外实测与移动车载作业两种方法比对作业效率,如表1所示:

作业效率比对 表1
从作业效率方面可知,车载激光扫描节省了大量的外业时间,采集的数据更加全面,适合用于城市规划。
5 成果精度比对
5.1 控制点精度对比
将试验区内控制点平面坐标与水准高程通过RTK测量数据与车载数据进行精度比对(表2),数据显示平面最大偏差 2 cm,高程最大 2.1 cm,误差精度数据表明车载点云数据满足工程应用要求。

控制点精度对比表(数据经加密处理) 表2

续表2
5.2 成果数据
将处理后的点云数据加载至CAD中进行道路边线、花圃、路灯等道路相关地物的绘制,得到道路中的相关数据,图13、图14分别为叠加点云后道路数据和未叠加点云道路数据。
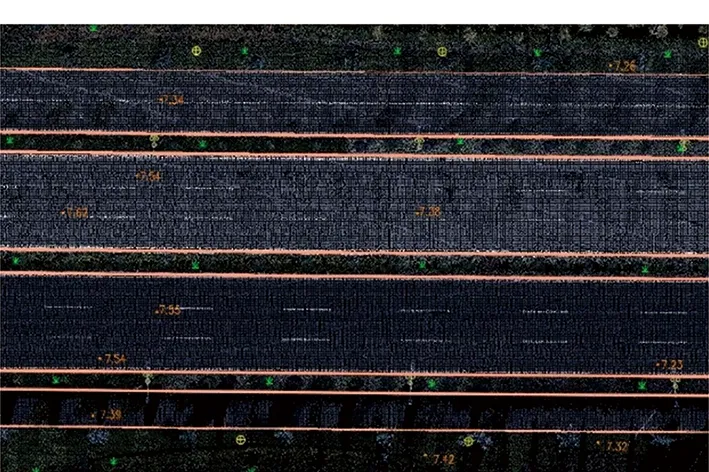
图13 叠加点云后道路数据
图14 未叠加点云道路数据
6 结 语
车载移动激光扫描测量应用与道路改扩建工程,数据采集更加全面,精度满足测量要求,提高了作业效率,节约了生产成本,后期会加大对道路路面车辆等噪声点的自动剔除研究,降低噪声干扰。
