机载LiDAR+Civil 3D在植被茂密山区边坡设计土石方概算中的应用
2022-03-06刘国超马会姣
刘国超,马会姣
(1.广州市城市规划勘测设计研究院,广东 广州 510060; 2.浙江华东建设工程有限公司,浙江 杭州 310014)
1 引 言
2020年9月22日,习近平总书记在第七十五届联合国大会上提出:“中国二氧化碳排放力争于2030年前达到峰值,努力争取2060年前实现碳中和。”党的十九届五中全会把碳达峰、碳中和作为“十四五”规划和2035年远景目标。水力发电作为一种清洁能源,利用水的势能进行发电,相比于传统的火力发电,排放的二氧化碳几乎为零,是清洁能源使用的重要手段。但是水利设施,多集中在高山峡谷区。由于峡谷陡峭、植被茂密,原始地形获取困难,传统的技术手段多采用人工现场采集方式,费时费力,且效率低下;GPS测量由于山高林密,信号遮挡严重,无法获得固定解,使得地形获取成为难点。机载LiDAR通过无人机搭载LiDAR设备,对被测体进行高分辨率航飞和点云获取,通过将LiDAR点云的多回波进行滤波算法处理,去除地表植被,获取真实地面高程数据信息,从而获得原始地形[1,2]。在获取了原始地形后,如何解算边坡设计的土方量成为又一个难点,由于土方量计算不仅需要原始地形数据,还需参考数据,即设计模型,而常规的土方量计算软件如CASS、HTCAD、天正土方等[3,4]难以解算。本文探讨通过Civil 3D建模软件,依据边坡设计参数建立参考模型,然后通过参考模型与现状地形对比,计算土方量,并结合某工程案例,验证机载LiDAR+Civil 3D在植被茂密山区边坡设计土石方概算中的应用。
2 机载LiDAR+Civil 3D技术原理
2.1 机载LiDAR系统组成及原理
LiDAR系统由激光测距仪(Laser Range Finder,LRF)、GPS、IMU、数码相机(CCD相机)、计算机控制导航系统(Computer Control Navigation System,CCNS)、数据存储单元等仪器组成。其中,LRF是用来发射、探测激光并计算距离的装置,GPS用来确定三维坐标,IMU用来测量方位(Orientation):航向角(heading)、侧滚角(roll)、俯仰角(pitch),CCNS用于控制在线数据的通信及飞行器的导航,CCD相机用于同步获取地面影像。机载LiDAR系统通常以小型飞机、直升机或者无人机作为飞行平台,如图1所示。
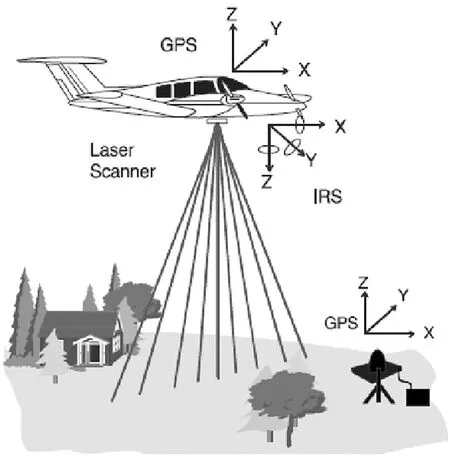
图1 机载LiDAR工作示意图
通过检校的安装误差角、POS数据、激光测距数据,LiDAR点云某一时刻的三维坐标可通过大地定向式(1)计算出来:
(1)
式中,RWGS84代表GPS天线坐标系到WGS84坐标系的旋转矩阵,RIMU表示IMU坐标系到GPS天线坐标系的转换矩阵,Rm表示激光扫描仪坐标系到IMU坐标系的转换矩阵,RS表示激光扫描仪的扫描角矩阵,X0、Y0、Z0表示GPS相位中心在WGS84坐标系中的位置,ρ表示激光发射点到地表扫描位置的距离,x、y、z为激光光斑在WGS84下的三维坐标,ax、ay、az表示激光发射点转换到GPS相位中心的位移量。
为了满足后续测量工程的需要,WGS84坐标系下的LiDAR点云坐标需要换算到国家坐标系统(如1980西安坐标系)或局部坐标系统下。一般通过GPS网平差约束法或者七参数法完成平面坐标系的转换。对于LiDAR点云的高程,可以通过多项式拟合或者精化大地水准面转化WGS84的椭球高为正常高。依据激光扫描仪扫描类型的不同,LiDAR点云的分布形式不尽相同。LiDAR点云再进行地面点的分类,从非地面点类中继续细分地物点类,分类结果可以生成DSM、DEM、DOM、数字地形图等成果[5,6]。LiDAR点云数据的处理流程可以用图2来表示。
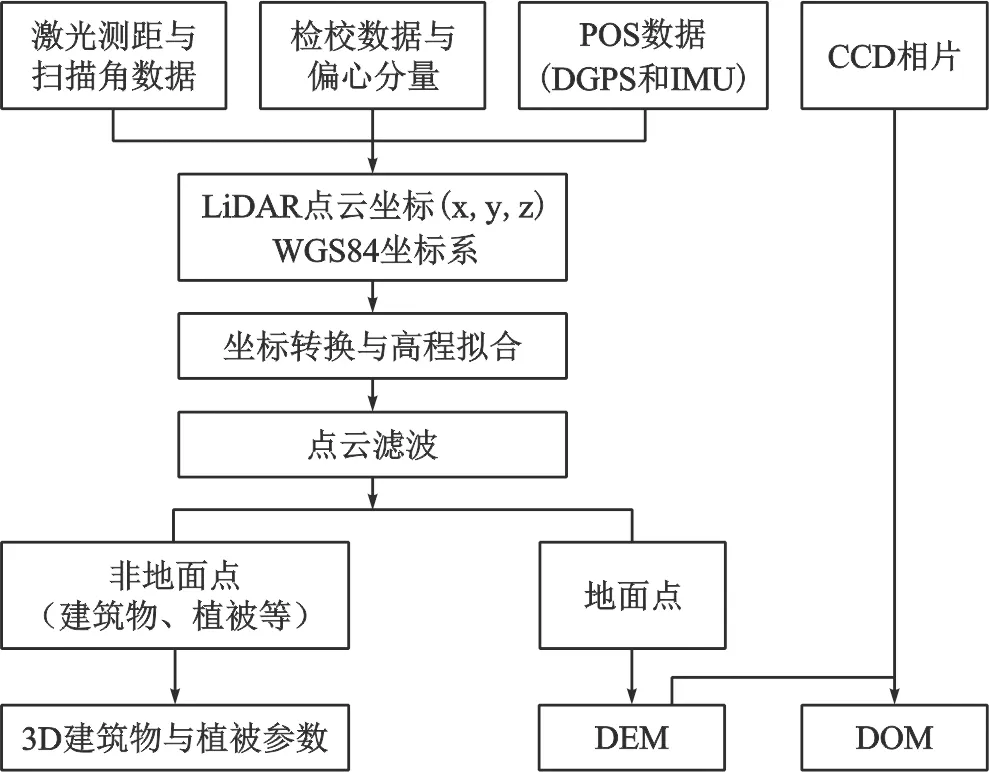
图2 典型的LiDAR点云数据处理流程
2.2 Civil 3D设计参数建模
Civil 3D作为一款面向基础市政建设的BIM软件,具有强大的建模功能,其操作命令和AutoCAD一样,但是其优势在于三维建模和场地放坡,独有的场地放坡功能,可以根据高程、距离、放坡比、至曲面4种模式进行放坡,满足不同设计参数的放坡需求[7]。相比于传统的CASS、天正等土方量计算软件,Civil 3D解算土方量有两点优势:①Civil 3D可以直观地展示地形地貌,三维立体还原测区原始地形,有助于发现测量粗差,剔除测量粗差;②传统的CASS和天正软件解算土方量需要原始数据和现状数据,现状数据一般可以通过实地测量获得,然而原始数据或者对比数据有时并没有测量数据,只是设计参数和放坡比,这样在CASS与天正软件解算土方量过程中就会由于缺少参照模型而无法进行。一般情况下,可以通过设计参数和放坡比解算出设计放坡的脚点和特征点,然后带入解算,这样既麻烦又可能计算错误,效率低;Civil 3D由于可以通过设计参数和放坡比建模,可以直观地展示放坡模型,相比于传统方法更有效率。
2.3 机载LiDAR+Civil 3D的边坡设计土石方计算技术流程
机载LiDAR以其无接触、高精度、多回波特点,可以快速、高精度获取山区茂密植被覆盖区域的原始地形,结合Civil 3D参数化、可视化建模功能,可以实现边坡设计的精准建模,从而解决土石方概算的原始模式和设计模型获取难点,其技术流程如图3所示。
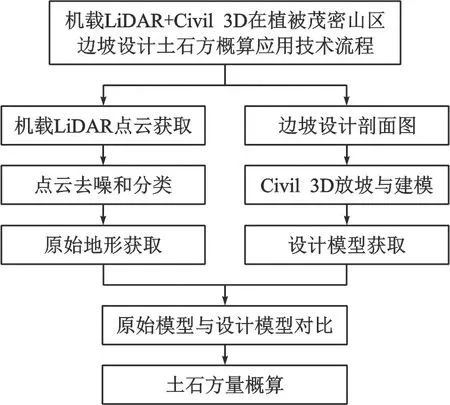
图3 机载LiDAR+Civil 3D在植被茂密山区土石方概算技术流程
3 实例分析
某水利设施拟建在一处深山峡谷处,由于地势低洼,两侧山高林密,为防止滑坡、泥石流等地质灾害,拟对两侧山坡进行边坡加固。此边坡高差约 100 m,坡度约30°,最陡处坡度约80°,植被覆盖茂密,原始地形获取困难,常规的测量方法一般采用全站仪+导线量测法,进行原始地形、地物获取,局限于植物覆盖茂密,全站仪视野较差,地形点获取困难。RTK测量由于信号遮挡,无法获得固定解。因此为获取两侧山体的原始地形,本项目拟采用罗宾逊R44载人直升机,搭载ALTM Galaxy T 1000激光雷达设备获取测区点云数据,同时搭载光学数码相机同步获取测区高分辨率光学影像数据,点云平均密度优于100点/m2,原始光学影像分辨率优于 5 cm(坡脚除外)。原始地形获取航线规划如图4所示。

图4 原始地形获取航线规划
通过外业数据采集,获取测区高精度的原始点云和影像图片,由于点云包括地形表面激光数据、地物表面激光数据和多路径效应造成的噪点(粗差点)等,需通过点云滤波去除地物点和噪声点,以获取准确的原始地形点。点云滤波常用方法有双边滤波、高斯滤波、直通滤波、随机采样一致性滤波等[8,9],本项目根据实际数据情况,采用自动滤波+人机交互方式进行处理,确保最终的点云数据中不含或仅存在较少噪点,如图5所示。

图5 点云去噪滤波(消除噪点)
点云去噪后,根据点云的多回波特性,对点云进行分类,区分地形点和地面点,建立原始地形DEM,将去噪和分类后的地形点云导入Civil 3D软件中,进行点云建模,以获取测区的精确原始地形图。为计算边坡设计土方量,在获取原始地形后,还需获取设计模型,通过设计模型和原始地形进行对比,计算土方量。本项目设计模型,采用Civil 3D场地设计和放坡功能进行建模,根据设计剖面图和放坡比例,在Civil 3D中进行精确放坡建模,获取精准设计模型,如图6所示。
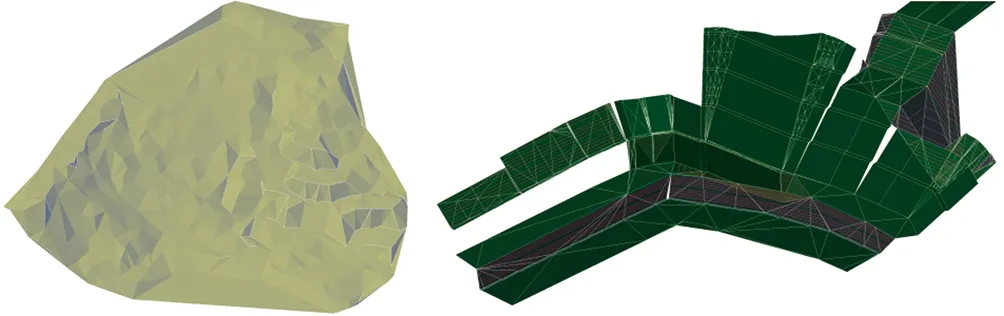
图6 获取原始地形和设计模型
通过将原始地形图和边坡设计曲面进行对比分析,采用复合体积算法或平均断面算法,在Civil 3D土石方计算工具中进行体积计算,得到土方量计算结果。同样的数据,采用CASS软件计算:第一步:建立参考模型,由于CASS计算需要坐标点作为原始数据建立三角网,需要通过设计参数和放坡比建立特征点(坡顶点、坡脚点、特征点),然后将特征点文件导入到CASS软件,作为参考模型;第二步:导入原始模型,将现有采集数据导入CASS作为原始数据;第三步:方格网法计算土方量。通过上述步骤解算出来的土方量同Civil 3D解算的进行对比,详情如表1所示。

Civil 3D和CASS软件解算土方量对比 表1
通过Civil 3D和CASS解算土方量对比,可以看出Civil 3D和传统的CASS软件解算土方量精度相当,但是却可以方便直观地展现模型形态,省去了由于缺少参考模型而需要通过设计参数去计算坐标点参与计算的麻烦,相对于传统的二维土方测算软件,具有更强大的优势。
4 结 论
本文主要探讨了植被茂密山区土石方概算的问题,针对高陡、高植被覆盖率山区地形获取困难的问题,通过机载LiDAR的高密度点云、多回波探测技术,实现茂密植被覆盖山区的点云数据快速获取,通过点云去噪、滤波和分层处理,快速、高精度构建原始地形模型;针对边坡设计土石方概算的参考模型问题,通过Civil 3D平台,利用其三维动态设计优势和场地放坡功能,实现由二维的CAD剖面设计到三维立体边坡模型的建立,为土方量概算提供精准参考模型。结合机载LiDAR+Civil 3D各自的优势,可以快速、便捷获取边坡设计土方量计算的原始和参考模型,为茂密植被覆盖山区边坡设计土石方概算提供了有益借鉴。
