基于低空倾斜摄影与三维激光扫描技术的城市三维建模研究
2022-03-06李宏宇
李宏宇
(上海市测绘院,上海 200063)
1 引 言
随着遥感技术的迅猛发展[1,2],地理信息的三维可视化表达逐渐成为研究热点,其在地理国情监测、城市模拟、区域可持续发展等多个领域正发挥着重要的作用[3]。因此,城市三维实景建模对于研究城市的发展具有重要的意义。
目前,三维建模技术主要分为3种:人工建模,倾斜摄影建模和激光雷达建模。人工建模方法模型效果较好,但其制作需要大量人力和制作周期,适用于小范围、特定目标的三维建模。谭仁春和姚岚[4]针对人工建模的不足,开发了人机交互的辅助工具,提高了人工建模的效率,但是该方法仍然无法满足大空间尺度三维建模需求。倾斜摄影测量技术可实现快速获取地物不同角度的影像,得到更为详尽的地物侧面信息[5],能更直观真实地反映实际地物特征[6,7],适用于大范围建模,但抗光照、风速干扰能力差,无法解决因地物遮挡造成的局部纹理扭曲、地物拉花、地物空洞等问题[8~10]。目前的研究大多采用机载激光雷达进行三维建模[11,12],但其对地物的纹理表达效果较差,还需对地物进行纹理采集,成本高、效率低。因此机载激光雷达技术目前大多应用于单体建筑的建模,现有研究较少地将机载激光雷达技术应用于综合城市三维建模中。
因此,本研究提出一种将低空直升机倾斜摄影与激光雷达融合建模的方法,将两种数据统一到一套坐标系中进行三维重建,获得高效率、低成本、精细化的城市三维模型。经实验,该方法可以应用于城市复杂环境中,取得了较好的效果。
2 技术路线与方法
本研究基于多源点云数据进行三维建模的基本原理是利用低空倾斜影像数据生成稀疏点云,以精度相对较高的激光点云数据为空间参考基准,以稀疏点云数据和激光点云数据为主要数据源,利用ICP算法将两种数据进行空间几何配准,生成密集点云数据,在此基础上构建不规则三角网(TIN)。最后对其进行贴膜处理,生成更高精度的三维精细化模型。具体流程如图1所示。

图1 多源点云数据融合技术流程图
3 多源点云数据融合建模试验
3.1 研究区概况
本研究选取上海市浦东新区张江科学城内作为研究区(如图2所示),面积约为 2.5 km2,测区北至上科路,南至环科路,东至哥白尼路,西至金科路。主要地物类型包括建筑物、水体、公路等,具有较强的城市地物代表性。本研究对该区域进行融合建模试验。

图2 2019年张江地区0.1 mDOM
3.2 多源数据获取
本次试验利用直升机同时搭载AMC1050倾斜摄影系统和RIEGL AS900机载三维激光扫描仪进行数据获取(如图3所示)。
将AMC1050倾斜摄影系统搭载在直升机上,同时采用十镜头进行多角度航摄影像。本实验区包含一个架次,航带间距 120 m,航高约 170 m,曝光点间隔约 20 m,影像间重叠度大于80%,垂直影像的空间分辨率约 3 cm,像控点密度约 5 个/km2~10 个/km2。

图3 直升机搭载倾斜相机和激光扫描设备
3.3 数据预处理
(1)点云数据处理
机载激光雷达点云数据处理主要包括2个部分:点云滤波处理以及点云数据配准。实验中,机载激光雷达获取的数据极限范围是 60 m,为了确保数据精度,只保留 20 m以内的数据,这样既能够有效去除数据中的噪音点以及无效点,还能够将数据量减少,提高后续的数据处理速度。因此首先利用徕卡Cyclone Register360将点云数据导出,并进行裁剪。
由于机载激光雷达获取的点云密度较高,需对其进行抽稀处理。体素滤波器将输入的点云数据分割成一个个微小的三维体素网格,以体素网格重心近似代表其他点。统计滤波器原理是计算每个点到与它相邻的K个点的平均距离。假设得到的结果是一个高斯分布,其形状由平均距离的均值和标准差决定,平均距离在标准范围之外的点,可以被定义为离群点并从数据中去除。
(2)倾斜数据处理
对于直升机倾斜摄影获取的影像首先需要进行预处理,从而进一步进行空中三角测量,得到空中三角测量质量报告。分析质量报告中关键点、连接点个数,初步判断其精度。
首先对倾斜摄影数据进行空中三角测量处理。研究发现利用常用软件ContextCapture自动运行空三加密时,由于对影像畸变校正的能力较弱,通常会出现连接点匹配较差的情况,如图4所示,会出现错层等情况,从而影响后续的三维建模成果。经过实验发现,利用PhotoScan进行空三计算,该软件空三计算能力强大并且影像畸变纠正高效,将此款软件运行的空三成果导出并导入ContextCapture进行后续的建模。从3D视图(如图5所示)可以看出,通过这种方式进行数据处理,结果明显优于ContextCapture,图6展示了此融合两款软件解算方法的基本流程。
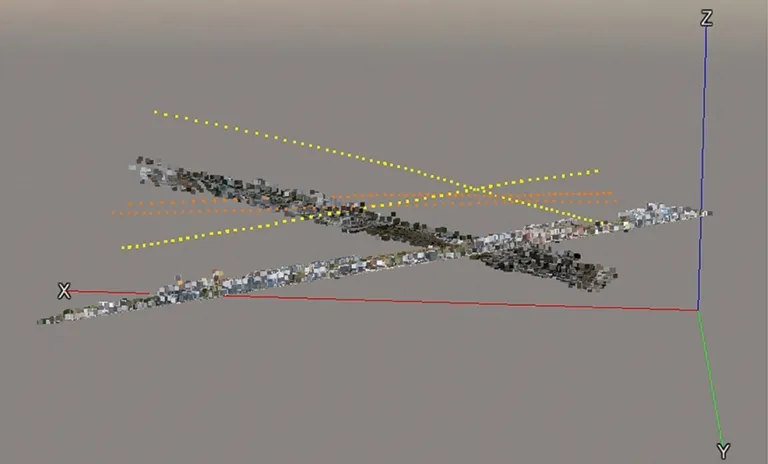
图4 ContextCapture空三计算的错层情况

图5 PhotoScan运行空三后导入ContextCapture效果图

图6 PhotoScan与ContextCapture融合解算空三建模流程图
3.4 基于ICP算法多源点云数据配准及融合建模
数据配准是将处于不同的空间坐标系的点集转换到统一的坐标系中,即计算出2个空间坐标系的旋转变换关系[13]。这里采用手动粗配准与自动精配准结合的方法进行点云配准。精配准采用的是ICP点云匹配算法,而ICP算法的配准效果与点集的初始位置有很大的关系,因此不能直接用于点云精配准,需要利用其他手段进行粗配准之后才能得到较好的效果。
ICP的基本原理是:首先获取两个点集的特征点,通过建立特征点间的对应关系解算出两者之间运动参数,利用求解出的参数进行数据配准[14,15]。最后,将直升机倾斜摄影影像与配准之后的激光雷达点云数据同时导入Context Capture三维建模软件中,利用该软件生成城市实景三维模型。
在完成基础的空三加密后,将激光点云数据作为控制基准面,将上一步生成的空三加密点再次进行整体平差,利用点云的几何特征来提取对应特征点,使这些对应的点计算出相应的旋转平移变换矩阵,最终将影像匹配的稀疏点云与机载点云最终嵌套在一起,精化了影像在拍摄瞬间的空间位置与姿态。图7与图8分别为激光点云数据和空三加密点融合前后示意图。

图7 激光点云数据和倾斜影像空三加密点示意图

图8 激光点云数据与倾斜影像空三加密点融合示意图
当密集点云数据与机载点云融合之后,形成的点云间隙更小,从而构建的不规则三角网更加密集,最终能够实现地物更丰富的轮廓细节,图9与图10展示了未加机载点云构建的三维模型与加载机载点云构建的三维模型局部细节对比图。从图中可以看出,联合倾斜影像和机载点云数据构建的模型在建筑侧面细节表达效果上有明显改善,轮廓细节更丰富准确,减少了模糊和拉花现象。

图9 单独用倾斜影像构建的模型示意图

图10 联合倾斜影像与机载点云构建的模型示意图
4 精度评价
在完成倾斜摄影三维建模之后,需要对倾斜摄影模型进行空间位置精度评定。通常是在倾斜模型上选取地面控制点,与外业实测控制点进行精度比较(如图11、图12所示)。项目组在浦东新区张江镇倾斜摄影项目中选取了一块区域通过量测同名点,得到精度统计结果,如表1所示。从表中可以看出,利用多源点云数据生成的三维模型,与外野实测点相比,精度大部分在 10 cm以内,得到了较好的结果。

图11 外业控制点采集量测坐标 图12 倾斜摄影模型与外业控制点比较

倾斜模型精度统计 表1
5 结 语
本研究分析比较了低空倾斜摄影三维建模与地面激光雷达三维建模的优缺点,结合倾斜摄影的高效性和机载激光扫描的精确性,提出了倾斜摄影密集匹配点云和机载激光雷达融合的城市三维实景融合建模方法。在实验过程中,总结了一套数据获取与数据处理的流程,包括多源数据获取、数据处理以及数据配准方法等,提高了三维模型的精度,完善了三维模型的部分纹理细节,得到了较好的建模效果。
