电力GIS巡检机器人沿狭小空间管道内壁攀爬特性分析
2022-03-05刘旭辉叶高呈
严 宇,刘旭辉,王 彪,江 维,叶高呈
电力GIS巡检机器人沿狭小空间管道内壁攀爬特性分析
严 宇1,2,刘旭辉1,2,王 彪1,2,江 维*3,叶高呈3
(1.国网湖南省电力有限公司检修公司,湖南 长沙 410004;2. 变电智能运检国网湖南省电力有限公司实验室,湖南 长沙 410004;3.武汉纺织大学 机械工程与自动化学院,湖北 武汉 430200)
提出了一种利用GIS巡检机器人进入GIS管道进行巡视和检修作业的新方法,首先给出了GIS巡检机器人的基本结构,GIS巡检机器人要实现整个GIS装备内部无盲区的检修作业,要求机器人能够沿着内壁管道进行攀爬作业。本文建立了GIS巡检机器人沿管道内部的底端、顶端、左右壁面、一般壁面进行攀爬的受力分析平衡模型,并基于该模型对机器人的沿内壁攀爬特性进行了理论分析,得到了作业环境参数、机器人机械结构参数和电气控制参数三者之间耦合关系模型,基于此为GIS巡检机器人的系统优化设计奠定了理论基础。最后,开发了GIS巡检机器人物理样机系统,并在实际的GIS装备中进行了巡视和检修作业实验,获得了所需GIS巡检机器人攀爬性能。本文GIS巡检机器人攀爬特性的研究对于GIS巡检机器人系统的优化设计及其实用化研究具有重要理论意义与实际应用价值。
狭小空间;GIS;巡检机器人;管道内壁;攀爬特性
0 引言
电力系统GIS(Gas Insulated Switchgear,GIS)设备[1-3]是气体绝缘金属封闭开关设备的简称,随着GIS广泛用于高压电力和变压系统,其装用量越来越大,年平均增长率超过13%。而GIS设备属于金属封闭式设备,它们一旦发生故障,损失将非常严重。为了减少GIS设备罐体维护检修所产生的成本,使用智能装置开展GIS内部检测是一个十分迫切的发展方向。特别是受到电力HGIS/GIS设备应用日益广泛,电力GIS 设备故障逐年增加,GIS设备内部检查验收及故障点定位困难等多重因素的共同影响,为保障变电系统的安全可靠稳定运行, 利用GIS巡检机器人来辅助甚至代替人工进行GIS设备维护检修作业,不仅能够提高作业效率而且能够将人工从危险的电力检修环境中解放出来。为实现GIS设备无盲区检修作业,要求GIS巡检机器人能够沿着GIS管道内壁进行攀爬,因此,机器人的攀爬能力[4-5]是GIS设备检修作业的关键,特别是在GIS装备狭小空间内的无碰避障爬坡运动更具挑战性,这也是目前沿内壁管道巡检机器人研究的热点问题之一。
GIS巡检机器人主要依赖于机器人的攀爬能力,在国外方面,爬壁机器人研究主要可以分为3大类[6-7],第一类是日本宫崎大学研发的基于负压式的爬壁机器人。第二类是以波士顿动力公司为代表的基于仿生吸附的足式仿生爬壁Rise系列机器人,Rise系列最大的特点[8-9]在于其足底具有特殊微毛结构的吸附机制, 依靠该机制,Rise可以不借助外力而实现垂直面的运动,从而极大地减低了机器人整体功率消耗。第三类是瑞士苏黎世联邦理工学院研发的Magnebike爬壁机器人,总重达3.3kg,体积达170×130×220mm3,最大行驶速度可达2.7m/min,磁吸附力为250N,主要应用在管道检测等场景,其对于GIS设备检修作业具有重要参考价值,此外,还有韩国Hanyang University研究一种两段式履带管内壁检测机器人使用差动转向,能适应管道直径范围为80-100mm,利用其两段式结构,能够跨越管内障碍物。另有日本东京HiBot公司开发用于化工厂管道检测的蛇形机器人等。在国内方面,香港中文大学和沈阳自动化研究所[10]研制了一种具有两种工作模式的管内移动机器人,即正常工作模式和自救模式。在正常工作模式下该机器人与其他丝杆螺母驱动的机器人类似。但当遇到障碍物或塞在管道某处时,锁紧机构启动,机器人转变到自救模式。北京邮电大学[11]研制了一种蠕动管道机器人,该管道蠕动机器人采用双球头结构,利用中间软轴的螺旋性能和弹簧的弹力作用使双球头配合控制机器人的前进。由于运用弹性软轴作为中间连接轴,机器人可以通过L型弯管。缺点是行走速度慢,驱动效率低,不能跨越障碍物。
综上所述,GIS巡检机器人在GIS装备中的狭小空间内沿管道内壁的攀爬与吸附行走是机器人完成GIS装备巡视和检修的关键,特别是对于结构化的GIS装备物理参数,机器人能否实现管道内壁的平稳爬坡是该机器人研究的一个关键所在。因此,本文针对该问题对机器人沿内壁攀爬的三种典型工况进行了受力分析和运动学建模,探寻了机器人沿内壁攀爬特别是沿顶部和左右面攀爬特性和机器人机械结构参数与环境参数的关系,找出了临界稳定点。最后,在GIS设备中利用物理样机进行了GIS设备检修作业实验,机器人运动灵活,能够在管道壁面上攀爬,实现GIS设备的检修作业,同时作业过程机器人运动稳定,本文的研究是对配电网络检修维护的全新应用和探索,其研究和实施对于提升复配电电网系统工作能效、推进电力系统自动化和智能化具有重要理论意义与实际应用价值。
1 GIS巡检机器人沿内壁攀爬运动学建模
1.1 机器人沿底端运动学建模

1.2 机器人沿左右曲面攀爬运动学建模
当机器人运动到管道内壁的左右两侧曲面时,机器人的车轮必须提供一定的吸附力才能使机器人静止吸附在某一位置,不然会因其自身重力而发生滑落,而这吸附力是由机器人车轮与管道内壁运动产生的摩擦力提供,故为使机器人能平稳吸附于管道内壁左右两侧,由于机器人在管道内壁左右两侧的运动是对称的,因此,以机器人在管道内壁左侧正中间的曲面为例,建立其运动学模型如图2所示。
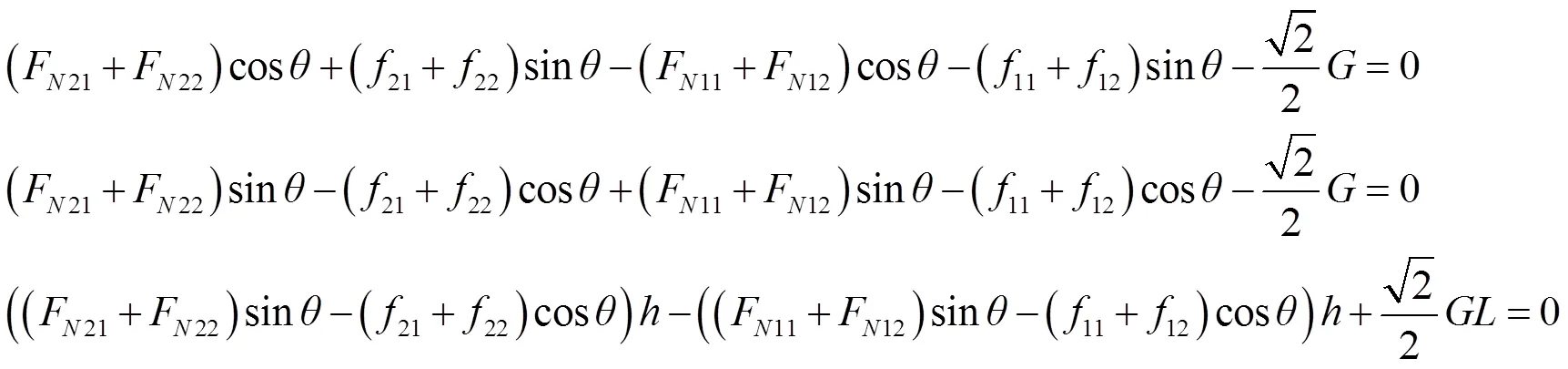
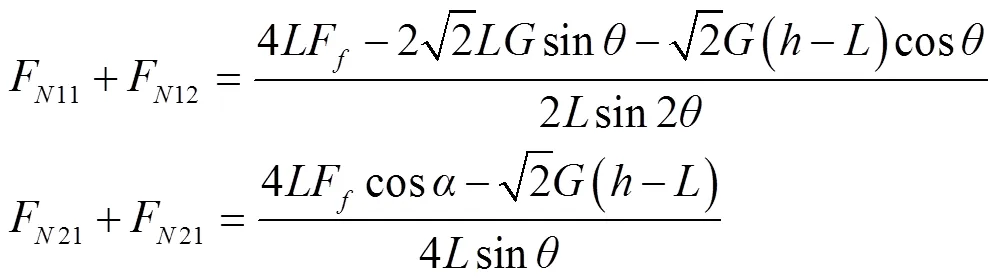
根据理论力学的受力平衡关系和力矩平衡关系,为使机器人吸附在管道内壁左侧曲面不发生侧翻或滑落,需满足的条件如式(2)所示。


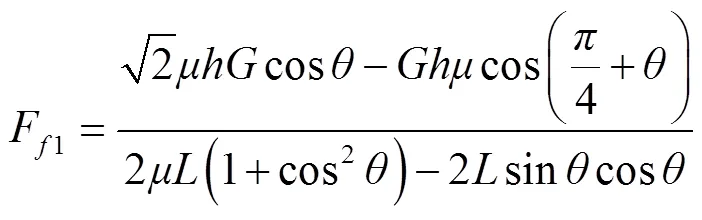
故要使机器人能平稳的吸附在管道内壁左侧曲面,车轮需提供的最小吸附力如式(5)所示。
1.3 机器人沿顶端攀爬运动学建模
由前述推导同理可知,当机器人运动到管道内壁顶端时,机器人车轮同样需要提供一定的吸附力,同时由于机器人是在最顶端,其四个车轮支持力的方向都与重力方向相同,故此时车轮需提供的吸附力达到最大值。建立如图3所示的机器人在管道顶端的运动学模型。
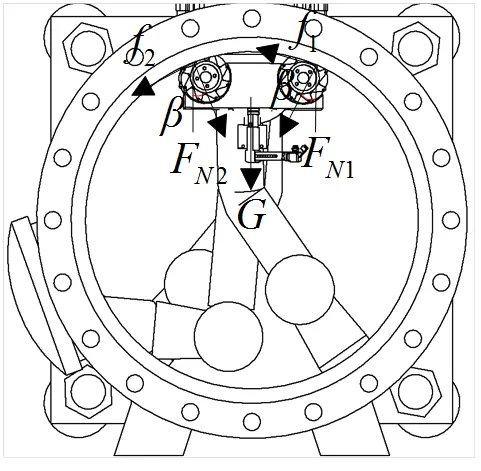
图3 GIS巡检机器人沿顶端攀爬受力分析示意图


1.4 机器人沿一般性曲面攀爬运动学建模

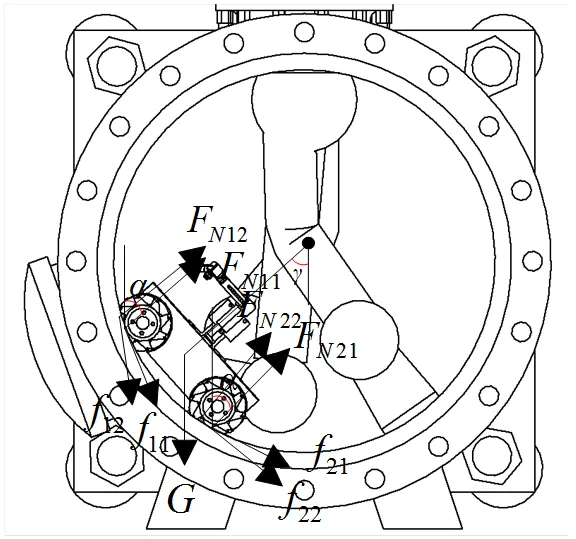
图4 机器人处于管道左下方的运动学模型
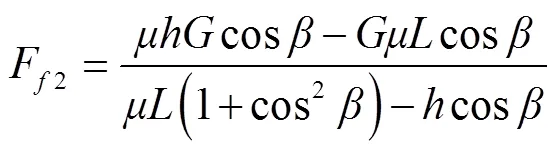
为使机器人不发生滑落现象,结合理论力学知识,建立如(8)式所示的平衡关系。

故要使机器人能平稳的吸附在管道内壁左下侧曲面,车轮需提供的最小吸附力如式(11)所示。
1.5 GIS巡检机器人沿内壁攀爬特性分析

2 GIS巡检机器人现场作业试验
在国家电网湖南省电力有限公司检修公司所辖的GIS设备中进行模拟作业试验,本节对样机做了不同环境下的吸附实验,分别在不同厚度、不同壁面环境下进行了测试,测试过程中壁面与磁阵列之间间隙为2mm。图5为试验现场,分别在GIS设备中钢铁质管道悬表面和竖直壁面进行了行走实验,实验平面均较为平整,无障碍物,均运行平稳,总体来看,GIS巡检机器人对不同壁面的适应能力强,吸附力满足GIS设备检修过程中攀爬要求,在该模拟工作环境中,其壁厚远大于铁皮柜壁面,因此,该GIS巡检机器人能够满足实际GIS设备检修应用需求。
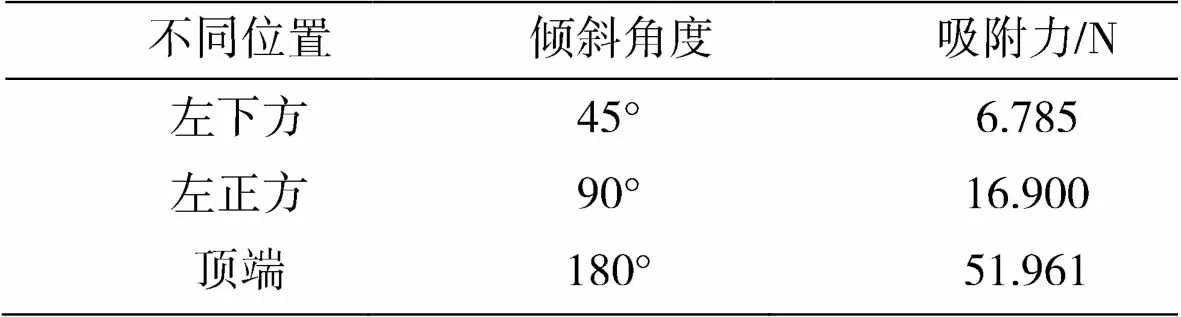
表1 机器人处于管道不同位置的吸附力
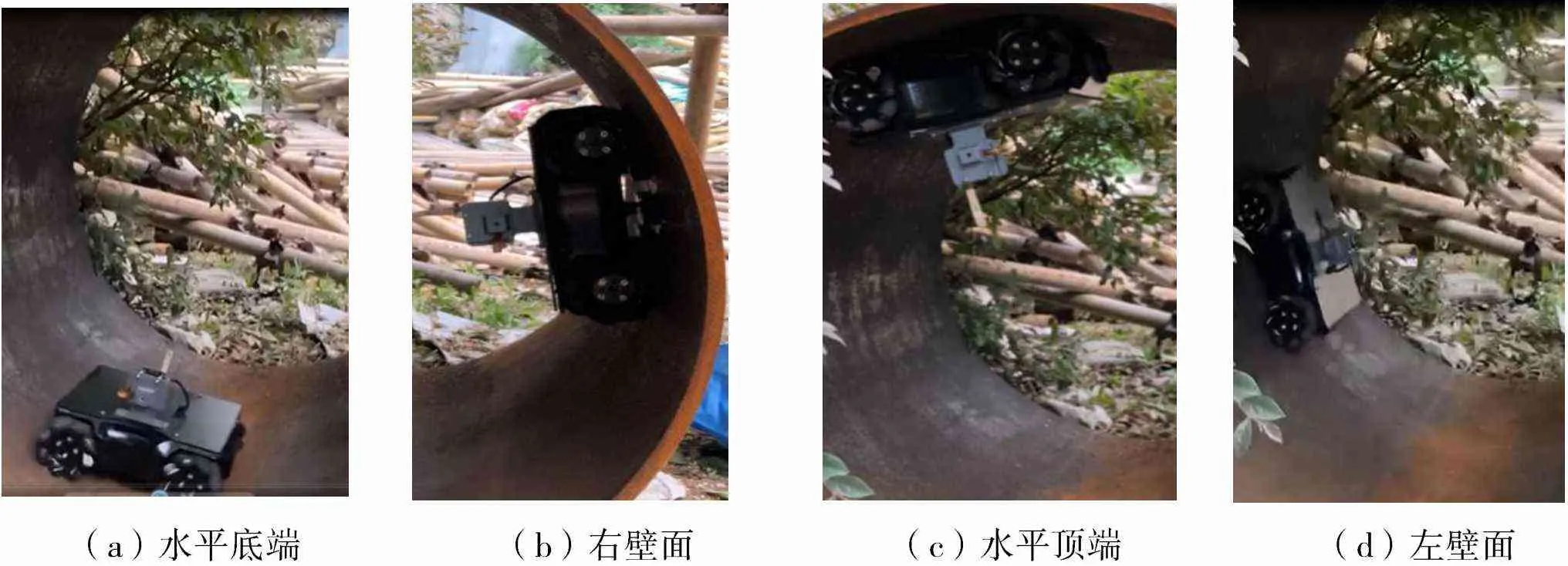
图5 GIS巡检机器人沿不同方向的攀爬实验
3 结论
(1)提出了一种利用GIS巡检机器人辅助和替代人工进行GIS内部管道进行巡视和检修的新思路和新方法,并给出了机器人的巡视检修作业运动规划。
(2)将机器人在GIS管道内的运动分为多种典型工况,分别对四种工况下的机器人攀爬运动进行了受力分析和运动学建模,通过特性分析得到了攀爬过程的临界稳定参数。
(3)开发了GIS巡检机器人物理样机系统,并通过在GIS管道内的现场作业实验验证了GIS巡检机器人替代人工进行GIS管道巡视检修作业的可行性和有效性。
[1] Seok K H, Kim Y S. A state of the art of power transmission line maintenance robots [J]. Journal of Electrical Engineering & Technology, 2016, 11(5): 1412-1422.
[2] Yue X, Wang H, Jiang Y. A Novel 110 kV Power Line Inspection Robot and its Climbing Ability Analysis[J]. International Journal of Advanced Robotic Systems, 2017, 14(3): 1-10.
[3] 吴祖伟, 熊峰, 渠国庆, 等. 基于螺旋驱动原理的管道机器人结构设计[J]. 工业控制计算机, 2017, 30(09): 52- 53.
[4] 马飞越, 游洪, 佃松宜, 等. 一种用于气体绝缘开关设备异物清扫与检测的机器人系统[J]. 计算机科学, 2017, 44(S2): 592-595.
[5] 李特,马书根,李斌,等. 螺旋驱动管内机器人自适应运动机理与机构设计[J]. 机械工程学报, 2016, 52(09): 9-17.
[6] S. A. Kulinich, M. Farzaneh. On ice-releasing properties of rough hydrophobic coatings[J]. Cold Regions Science and Technology, 2011, 65 (1): 60-64.
[7] 李庆凯, 唐德威, 姜生元, 等. 三轴差动式管道机器人的驱动特性及仿真研究[J]. 哈尔滨工程大学学报, 2012, 33(06): 753-758.
[8] Fu X, Feng H, Gao X. UAV Mobile Ground Target Pursuit Algorithm [J]. Journal of Intelligent & Robotic Systems, 2012, 68(3):359-371.
[9] Wang Wei, Wu Gong-ping, Bai Yu-cheng, et al. Hand-eye-vision based control for an inspection robot’s autonomous line grasping[J]. Journal of Central South University, 2014, 21(06): 2216-2227.
[10] Ngo T Q, Wang Y N, Mai T L, et al.. Robust adaptive neural-fuzzy network tracking control for robot manipulator [J]. International Journal of Computers Communications & Control, 2016, 7(2): 341-352.
[11] Miller R, Abbasi F, Mohammadpour J. Power line robotic device for overhead line inspection and maintenance[J]. Industrial Robot: An International Journal of robot research and application, 2017, 44(1): 75-84.
Analysis of the Climbing Characteristics of the Power GIS Inspection Robot in a Narrow Space along the Inner Wall Pipeline
YAN Yu1,2, LIU Xu-hui1,2, WANG Biao1,2, JIANG Wei3, YE Gao-cheng3
(1. State Grid of Hunan Electric Power Company Maintenance Company, Changsha Hunan 410004, China; 2. Substation intelligent operation and inspection laboratory of State Grid Hunan Electric Power Co., Ltd, Changsha Hunan 410004, China; 3. School of Mechanical Engineering and Automation, Wuhan Textile University, Wuhan Hubei 430200, China)
This article proposes a new method of using GIS inspection robots to enter the GIS pipeline for inspection and maintenance operations. First, the basic structure of the GIS inspection robot is given. The GIS inspection robot must realize the entire GIS equipment without blind areas. Maintenance work requires the robot to be able to climb along the inner wall of the pipeline. Therefore, this paper establishes a force analysis and balance model for the GIS inspection robot to climb along the bottom, top, and left and right walls of the pipeline. The robot’s climbing characteristics along the inner wall are theoretically analyzed, and the coupling relationship model among the working environment parameters, the robot mechanical structure parameters and the electrical control parameters is obtained. Based on this, the theory is laid for the system optimization design of the GIS inspection robot. Basically, finally, the GIS inspection robot physical prototype system was developed, and the inspection and maintenance operation experiments were carried out in the actual GIS equipment. The results also obtained the climbing performance of the GIS inspection robot proposed in this article. This article GIS inspection robot. The research of climbing characteristics has important theoretical significance and practical application value for the optimization design and practical research of GIS inspection robot system.
Narrow space; GIS; Inspection robot; Pipe inner wall; Climbing characteristics
江维(1983-),男,讲师,博士研究生,研究方向:电力作业机器人.
国网湖南省电力有限公司科技项目(5216AJ20000V).
TS242.6
A
2095-414X(2022)01-0030-05
