煤矿井下UWB人员定位系统研究
2022-03-04张海军孙学成赵小虎闫坤程
张海军, 孙学成, 赵小虎, 闫坤程
(1.山煤国际能源集团股份有限公司 煤业管理公司晋北分公司, 山西 大同 037101; 2.矿山物联网应用技术国家地方联合工程实验室, 江苏 徐州 221008; 3.中国矿业大学 信息与控制工程学院, 江苏 徐州 221008)
0 引言
煤矿智能化建设对井下人员定位系统的精度、实时性提出了更高要求。与基于红外探测[1]、超声波[2]等技术相比,采用纳秒级脉冲信号进行通信的UWB(Ultra Wide Band,超宽带)技术因其极高的带宽和时间分辨率[3-6],可很好地降低NLOS (Non Line of Sight,非视距)干扰,更好地适应井下复杂环境,实现厘米级精度定位[7-8]。
为提高UWB定位系统精度,何永平等[9]采用2次粒子滤波方法处理原始数据;罗豪龙等[10]针对基于TDOA(Time Delay of Arrival,到达时间差)的UWB定位系统,采用Chan算法和改进的卡尔曼滤波算法,进一步消除了NLOS干扰;王浩等[11]针对UWB定位系统中的测距值进行卡尔曼滤波后,采用Taylor级数展开方法得到定位坐标,并采用中位值平均滤波方法对定位坐标进行优化,使动态目标定位精度更高。
针对井下无线信号传输中的NLOS干扰问题,本文设计了一种煤矿井下UWB人员定位系统。该系统通过二维区域判别机制确定定位区域,采用带有回传帧机制的ADS-TWR(Asymmetric Double-Sided Two-Way Ranging,非对称双边双向测距)算法实现测距,采用WLS(Weighted Least Squares,加权最小二乘法)与UKF(Unscented Kalman Filter,无损卡尔曼滤波)联合定位算法解算位置坐标,提高定位精度,同时通过备用锂电池、LoRa通信技术等,保证系统应急情况下正常工作。
1 系统整体设计
1.1 系统架构
煤矿井下UWB人员定位系统主要由标签、基站(集成LoRa无线节点)、LoRa集中器、工业以太网、交换机、上位机等组成,如图1所示。
标签参与实时测距,并运行二维区域判别机制。基站运行带有回传帧机制的ADS-TWR算法,与标签完成实时测距。系统具有以太网和LoRa2种通信方式。正常情况下,基站将测距数据发送至以太网,经交换机上传至上位机进行位置解算;在应急情况下,基站将测距数据发送至LoRa无线节点,再通过LoRa集中器将数据传输至交换机。LoRa无线节点可组成Mesh网络,根据井下情况自组网,保证测距数据在应急情况下正常传输。上位机接收到测距数据后,实时运行WLS与UKF联合定位算法解算标签位置坐标。
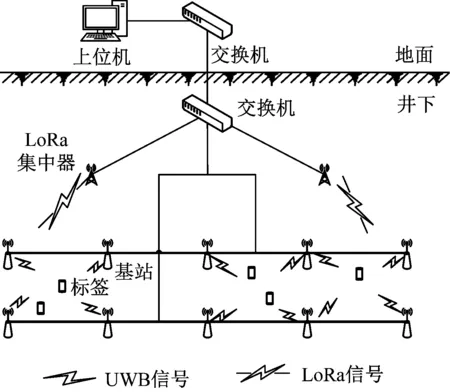
图1 煤矿井下UWB人员定位系统结构Fig.1 Structure of UWB personnel positioning system in coal mine
1.2 系统硬件
标签和基站是系统主要设备。 标签硬件组成如图2所示。其主控芯片采用STM32F103,负责与UWB信号收发模块DW1000通信[12],并对接收数据进行处理。DW1000用于收发UWB信号,并将测距过程中产生的时间戳数据发送至STM32F103。DW1000与STM32F103之间通过SPI(Serial Peripheral Interface,串行外设接口)通信。 标签采用锂电池供电方式,通过充电管理模块实现充放电管理,通过稳压模块将锂电池输出的3.7 V电压转换为3.3 V,为STM32F103与DW1000供电。
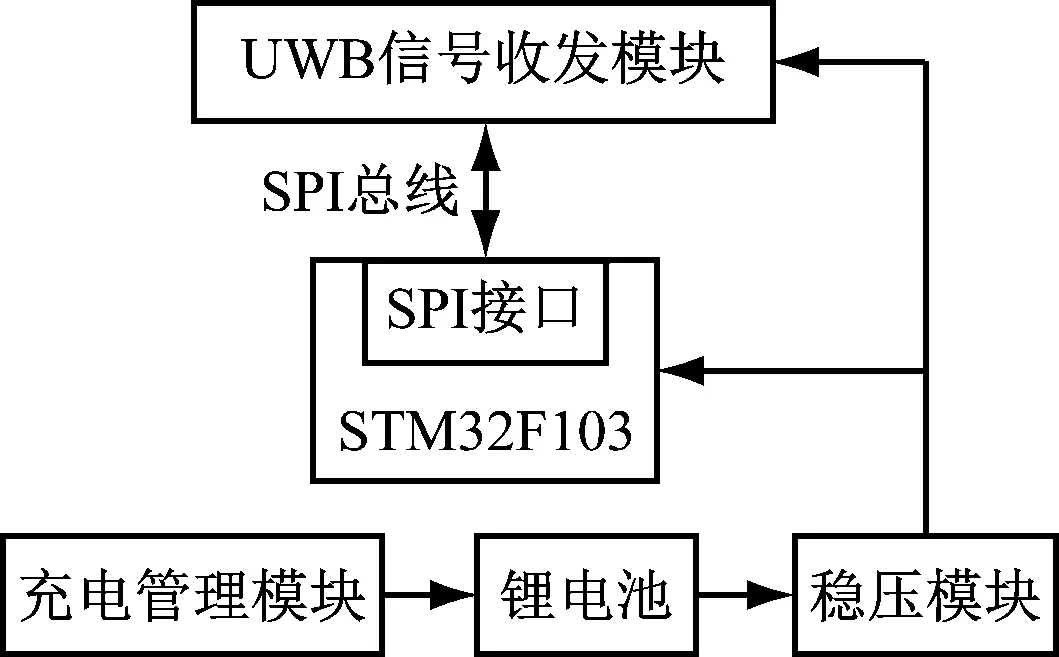
图2 标签硬件组成Fig.2 Label hardware construction
基站硬件组成如图3所示。其UWB信号收发模块与标签相同,且具有以太网收发模块、交换机模块、LoRa通信模块[13]。主控芯片采用STM32F429,其通过SPI总线与UWB信号收发模块通信,通过RMII接口与以太网收发模块连接,实现以太网数据传输。交换机模块可连接多路以太网收发模块,实现基站之间的级联。为保证系统应急通信功能,设计了LoRa通信模块,当以太网通信中断时,启用LoRa通信方式。基站以锂电池作为备用电源,当电源被切断后启用锂电池供电。
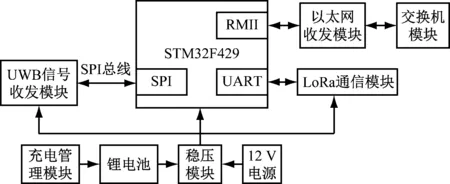
图3 基站硬件组成Fig.3 Base station hardware construction
2 二维区域判别机制
在实际定位场景中, 标签每次定位都会向其周围的所有基站广播Poll帧,接收到该数据帧的基站向标签发送Resp帧,而UWB定位系统中一般只需3个基站即可实现二维定位,因此造成定位过程存在大量无效帧,加大了系统计算量,且影响定位精度。在多基站定位场景中,标签只与其距离最近的基站通信,可同时保证系统定位效率和精度。因此,引入二维区域判别机制,以解决定位过程中大量无效帧问题。该机制对定位区域进行划分,标签可自动判别自身所处区域并只与该区域内的基站通信。
二维区域判别机制包括带有回传帧机制的ADS-TWR算法、区域判定策略及区域校正策略。
2.1 带有回传帧机制的ADS-TWR算法
采用带有回传帧机制的ADS-TWR算法进行标签与基站之间的距离测量。ADS-TWR算法利用基站与标签之间的3次通信(收发Poll,Resp,Final帧)得到测距过程中信号飞行时间,从而计算标签与基站之间距离。该算法无需标签与基站之间进行时钟同步,可减小由标签与基站之间时钟偏移造成的测距误差[14]。为使标签接收到单次测距数据后进行二维区域判别,在ADS-TWR算法完成3次通信后加入回传帧Report,如图4所示。Report帧中含有标签和基站进行1次ADS-TWR后的数据。基站向标签发送Report帧后,标签即可知本次测距数据,为二维区域判别提供依据。
2.2 区域判定策略
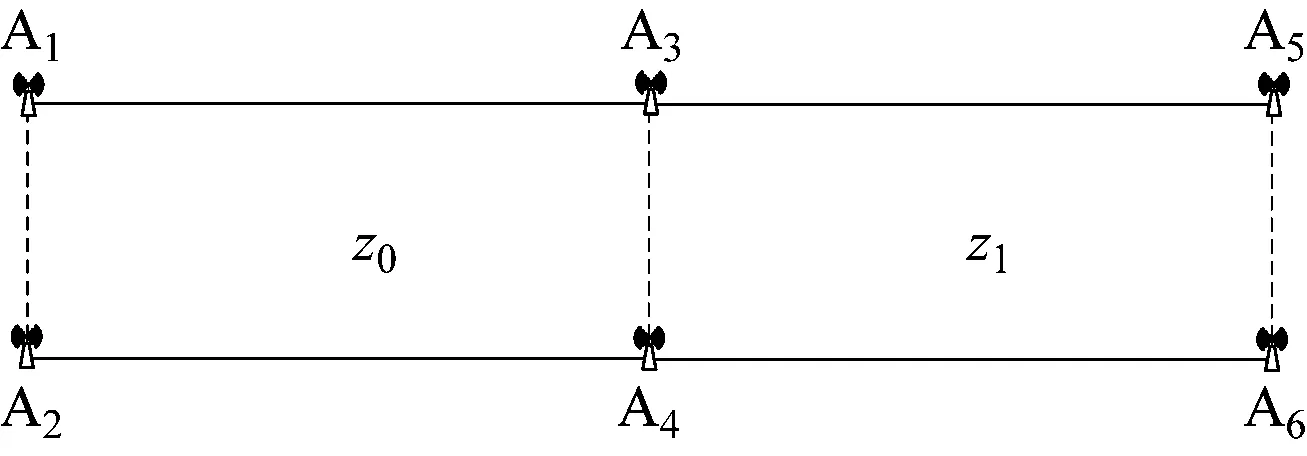
考虑到UWB定位系统中只需3个基站即可实现定位,为方便基站部署,将基站沿两侧巷道壁等间距分布,如图5所示。设井下巷道内共有2n+4个基站A1,A2,…,A2n+4(编号分别为1,2,…,2n+4),其将巷道划分为n+1个定位区域z0,z1,…,zn,每次定位过程中标签只需与其所在区域内4个基站通信即可。沿巷道壁每2个基站之间距离为l,巷道宽度为w。为了保证定位精度,l一般为w的3~4倍,本文取l=4w。
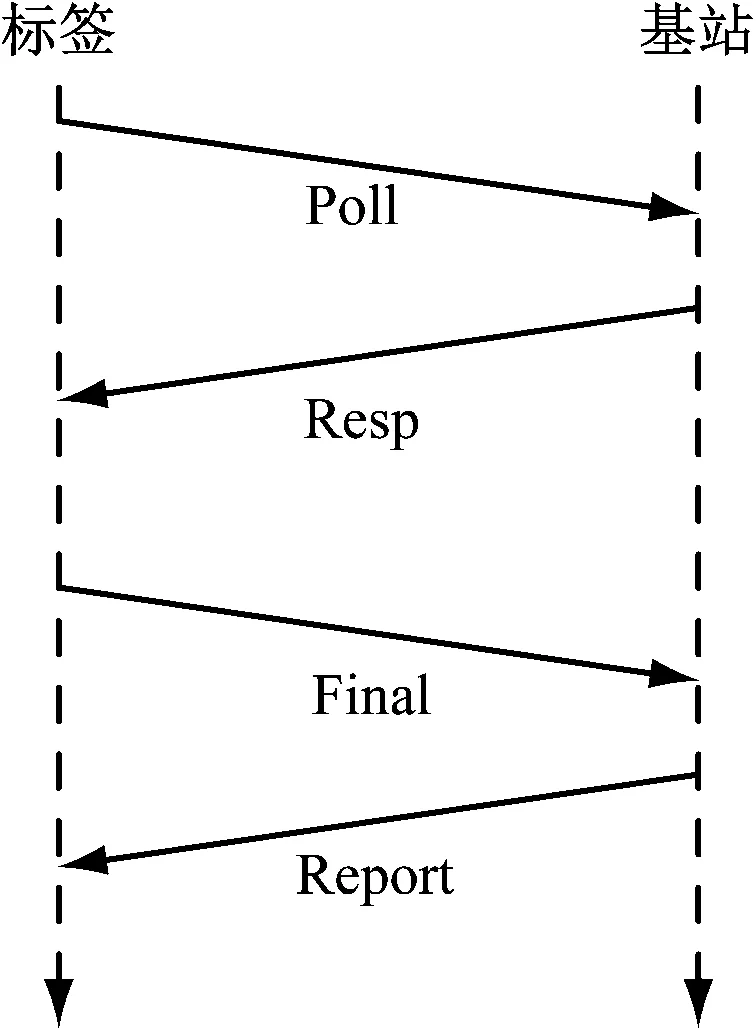
图4 带有回传帧机制的ADS-TWR算法原理Fig.4 Principle of ADS-TWR algorithm with return frame mechanism
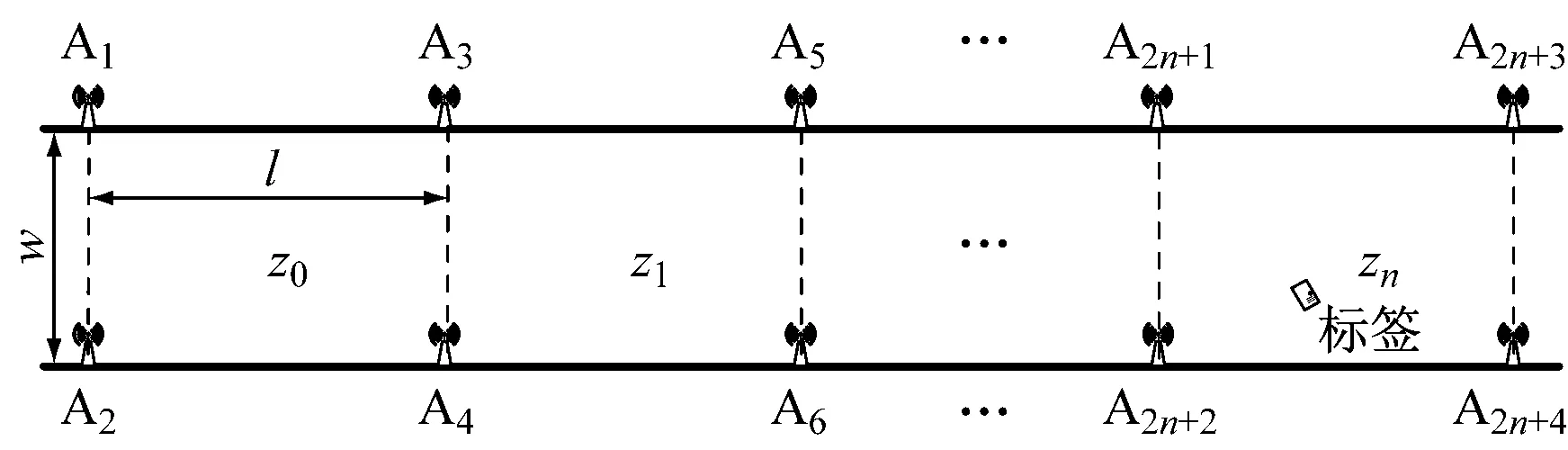
图5 井下基站部署Fig.5 Underground base station distribution
基于井下基站部署进行二维区域判别。针对基站、测距数据及定位区域,分别建立集合I,D,Z。I中包含所有基站的编号;D中包含单次定位过程中标签通信范围内所有基站通过Report帧发送给该标签的测距数据;Z中包含所有划分的定位区域。3个集合的关系如图6所示。
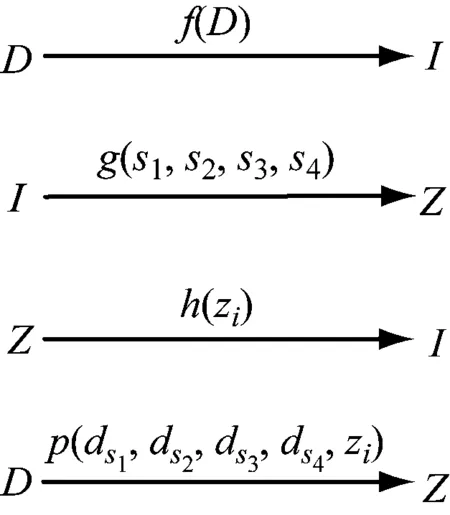
图6 基站、测距数据、定位区域集合关系Fig.6 Relationship among base station set, ranging data set and positioning area set
标签上电后,根据D中数据判断5个距离自身最近的基站,从中选出连续且以奇数开头的4个基站编号s1,s2,s3,s4。令s1=2i+1,s2=2i+2,s3=2i+3,s4=2i+4(i=0,1,…,n),则判定标签处于由基站As1,As2,As3,As4围成的定位区域zi中。确定zi后,标签与基站As1,As2,As3,As4通信,根据ADS-TWR算法分别得出标签与基站As1,As2,As3,As4的距离ds1,ds2,ds3,ds4。标签根据回传的测距数据,采用WLS算法计算出自身相对于定位区域zi的坐标(x,y)[15]。根据该坐标可判断标签是否移动到相邻区域。
由此得到二维区域判别模型:
f(D)={s1,s2,s3,s4}s1,s2,s3,s4∈I
(1)
g(s1,s2,s3,s4)=zis1=2i+1
(2)
h(zi)={s1,s2,s3,s4}s1=2i+1,s2=2i+2,
s3=2i+3,s4=2i+4
(3)

(4)
式中f(·),g(·),h(·),p(·)分别为集合D与I、I与Z、Z与I、D与Z的映射函数。
式(1)表示标签可根据广播发送测距请求后测得的多个测距数据判别构成该标签所处定位区域的4个基站。判别准则为从最小的5个测距数据中选出4个连续的基站编号,且第1个编号为奇数。
式(2)表示标签可根据自身所处定位区域内的4个连续基站编号,判别自身所处定位区域编号。判别准则为令该4个连续基站编号中最小的编号为2i+1,求取i,则定位区域为zi。
式(3)表示定位标签根据自身所处定位区域zi,判别该区域内的4个基站编号,之后仅与该4个基站通信。判别准则为利用已知定位区域编号计算2i+1,2i+2,2i+3,2i+4。
式(4)表示标签根据自身所处定位区域及该区域内4个基站回传的测距数据,判别当前定位区域是否已切换为相邻区域,并对标签所处的定位区域进行更新。判别准则为计算标签相对于该定位区域的坐标,根据坐标判断是否发生区域变换。
根据二维区域判别模型,得出区域判定策略:
(1) 标签上电后,向所有基站广播Poll帧,标签通信范围内的基站利用带有回传帧机制的ADS-TWR算法进行测距,并将测距数据发送至标签,利用式(1)判别基站编号s1—s4。
(2) 标签根据式(2)及已知的s1—s4判别自身所处定位区域zi。
(3) 标签根据式(3)及已知的zi判别该区域内的4个基站编号,只与这4个基站通信。
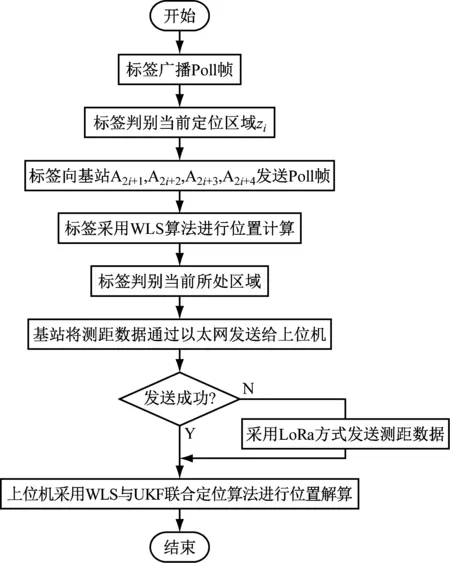
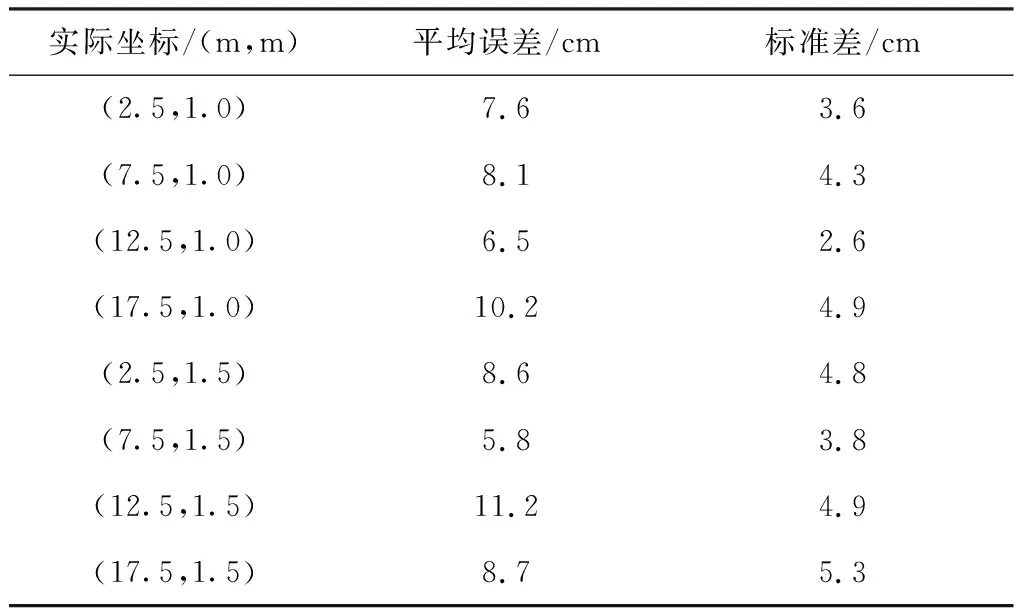
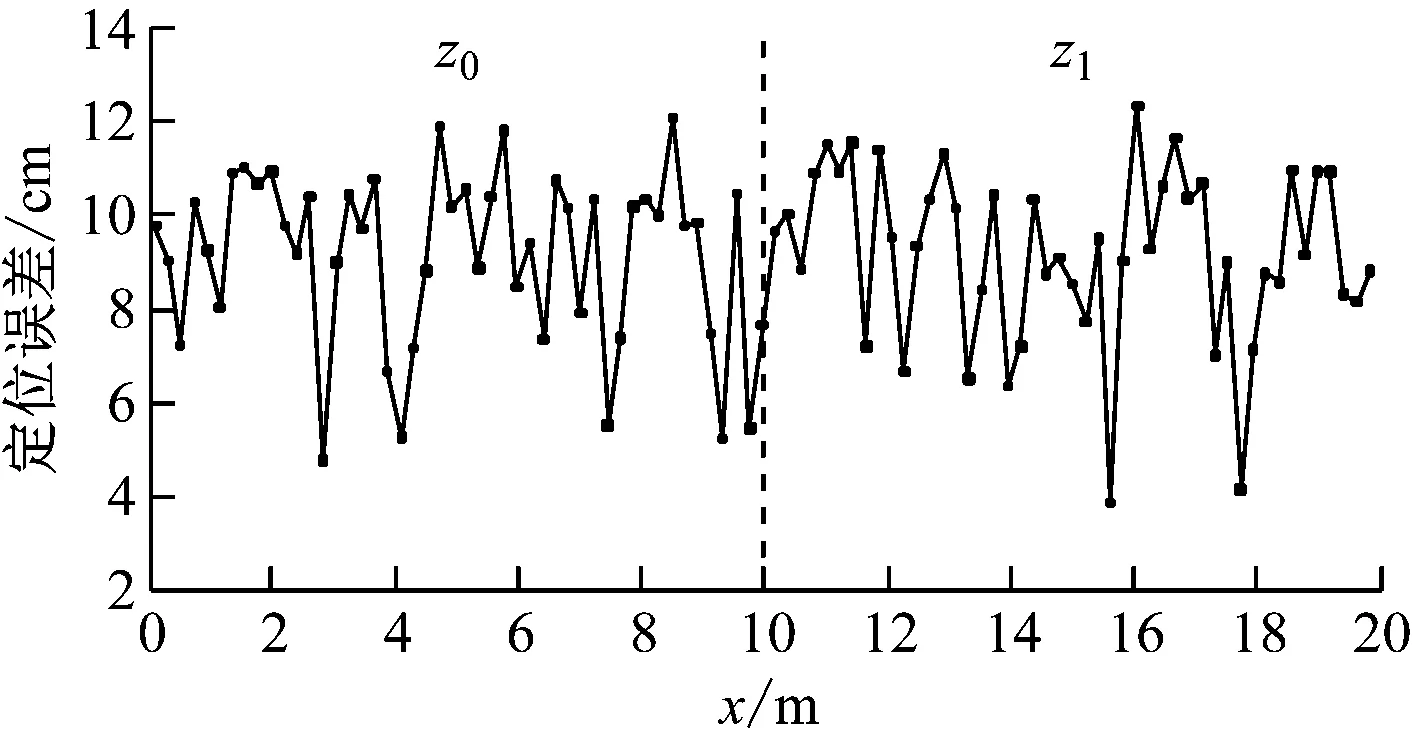
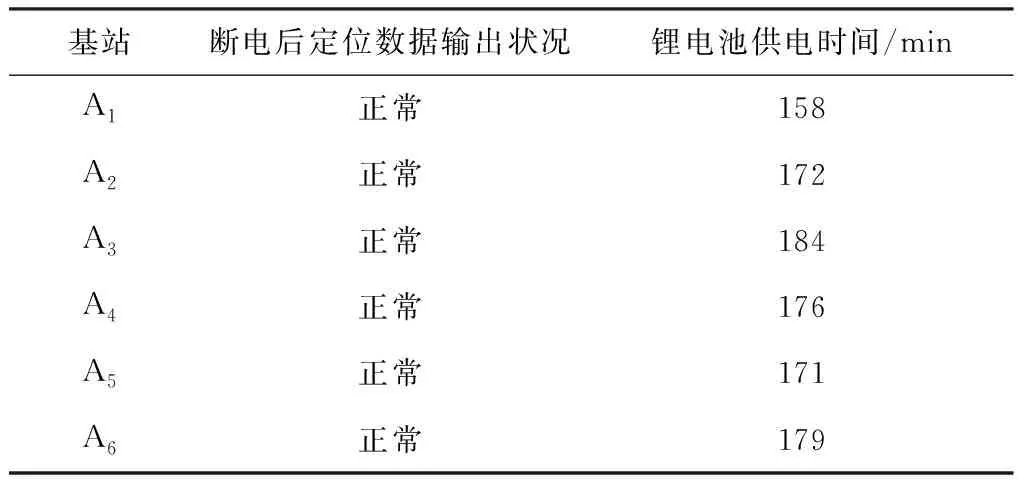
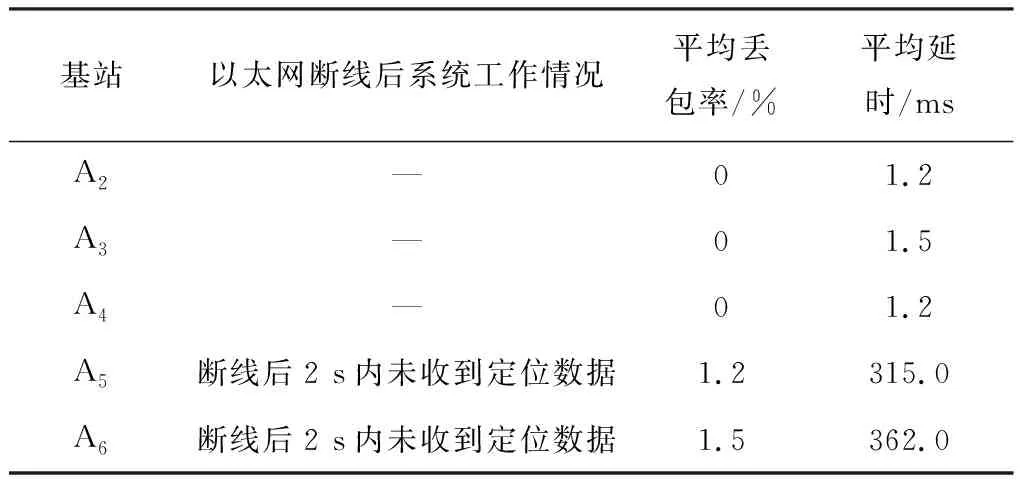
(4) 标签根据测距数据ds1,ds2,ds3,ds4,采用WLS算法计算自身相对于zi的坐标(x,y)。根据式(4),当x<0且0 (5) 若标签检测出其他异常情况,则返回步骤(1)。 利用上述区域判定策略可得标签与基站之间的通信时序,如图7所示。 图7 标签与基站通信时序Fig.7 Communication time sequence between tag and base station 井下环境中存在的电磁干扰、温湿度变化等使得测距过程中出现异常[16],由此导致定位误差甚至失败。针对该问题,提出了区域校正策略,实时校正定位过程中的错误位置。其思想为先检测区域判别过程中的异常情况,若存在异常则初始化标签,重新进行区域判别。 区域判别过程中的异常情况主要包括: (1) 无满足条件的4个连续且以奇数开头的基站编号。在实时定位过程中,若基站返回给标签的测距数据集合D中最小值对应的以奇数开头的4个基站编号不连续或连续基站编号不足4个,则无法进行区域判别,需进行区域校正。 (2) 根据ds1,ds2,ds3,ds4无法解算标签相对位置。将ds1,ds2,ds3,ds4代入WLS算法中出现无解情况,说明定位过程中出现测距错误,无法解算标签相对位置,需进行区域校正。 (3) 基站无应答。标签多次向基站发送Poll帧后接收不到基站返回的Resp帧,或完成测距后标签接收不到基站返回的Report帧,说明定位过程中有基站脱离标签通信范围,需进行区域校正。 煤矿井下UWB人员定位系统采用区域判定和区域校正策略可准确判别标签当前所在定位区域,标签仅与该区域内4个基站通信,无需再与其通信范围内的所有基站通信,解决了标签与多基站定位过程中的大量无效帧问题,减小了定位耗时及系统复杂度。 煤矿井下UWB人员定位系统工作流程如图8所示。 标签与基站根据二维区域判别机制,在相应定位区域内进行测距。基站将测距数据通过以太网或Mesh网络发送至上位机,上位机对测距数据进行实时处理并解算标签位置。在位置解算过程中采用WLS与UKF联合定位算法[16],结合已知的基站坐标,先采用WLS求解粗略的标签位置坐标,再采用UKF对粗略位置坐标进行滤波、预测,得到精确坐标,从而降低井下复杂环境中的NLOS干扰影响,提高定位精度。 图8 系统工作流程Fig.8 System working flow 在长20 m、宽2.5 m、高3 m的区域内进行系统测试。该区域内布置6个基站A1—A6,将测试区域划分为z0,z12个定位区域,如图9所示。 图9 系统测试区域Fig.9 System test area 表1 系统静态定位测试结果Table 1 Static positioning test results of the system 在动态定位测试中,采用滑动支架固定标签,在测试区域内标记路线,测试人员来回走动模拟井下NLOS环境,推动支架按标记路线滑行,记录系统定位坐标,并计算定位误差,结果如图10所示。 图10 系统动态定位测试结果Fig.10 Dynamic positioning test results of the system 测试结果表明:系统动静态定位精度较高;在动态定位测试过程中,标签所属区域发生变化时系统仍能稳定输出定位数据,且定位误差较小;在NLOS环境下定位误差较稳定,表明系统具有较强的抗NLOS干扰能力。 在基站正常供电且工作一段时间后,同时切断所有基站电源,观察系统定位数据输出状况及基站锂电池供电时间。测试结果见表2。可看出基站在断电情况下,由锂电池供电可维持3 h左右正常工作时间。 表2 基站断电情况下系统应急测试结果Table 2 Emergency test results of the system in case of base station power failure 将基站1作为Mesh网络的汇聚节点。所有基站通过以太网方式传输定位数据,一段时间后断开基站5,6用于级联的网线,观察定位数据传输情况,并计算定位数据丢包率与延时,结果见表3。可看出基站5,6在以太网断线后,基站内LoRa通信模块经历2 s路由发现过程,此时定位数据传输中断,之后通过LoRa方式传输定位数据,通信过程中存在一定程度的数据包丢失、延时增大等现象,但在无法进行以太网通信的应急情况下提供了定位数据,具有一定实用价值。 表3 以太网断线情况下系统应急测试结果Table 3 Emergency test results of the system in case of Ethernet disconnection (1) 煤矿井下UWB人员定位系统在测距过程中采用带有回传帧机制的ADS-TWR算法,无需时钟同步,保证了测距精度;采用二维区域判别机制,减少了定位过程中的大量无效帧,提高了定位效率;采用WLS与UKF算法对定位坐标进行求解、滤波、预测,提高了定位精度。 (2) 系统在硬件设计上采用备用锂电池技术,保证了基站断电情况下的应急供电;采用以太网与LoRa 2种通信方式,在以太网断线情况下,采用Mesh网络传输定位数据,保证系统应急通信。 (3) 测试结果表明:系统具有较高的动静态定位精度,抗NLOS干扰能力较强;在基站断电或以太网断线情况下,系统能够实现一段时间内的应急通信。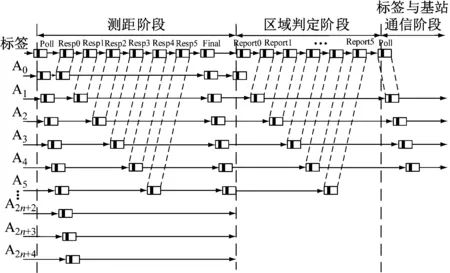
2.3 区域校正策略
3 系统工作流程
4 系统测试
4.1 定位测试

4.2 应急测试
5 结论
