毗邻互通立交特长隧道驾驶负荷研究
2022-03-02白婧荣唐伯明孙宗元毕辉云向恬君
白婧荣,唐伯明*,孙宗元,毕辉云,向恬君
(重庆交通大学,a.土木工程学院;b.交通运输学院,重庆400074)
0 引言
毗邻互通立交特长隧道是受到地形限制或规划空间不足等影响的特长隧道与互通立交之间间距较小的特殊情况,受到特长隧道压抑环境和视线差异的影响,在特长隧道出口与立交出口距离过近的条件下,易发生错过出口、急刹车、突然变道及追尾等交通事故,且事故影响范围广,后果严重,救援疏散困难,具有连锁效应和辐射效应。为保障隧道的行车安全,通常在隧道内车道间设置白色实线,禁止车辆变更车道,但随着隧道与互通立交间距过小的情况逐渐增多,离开隧道后,部分车辆需要快速驶向互通立交出口匝道离开主线,在连接段长度不满足安全变道条件时,宜采取驶出匝道车辆在特长隧道内完成车道变换的交通组织方案,毗邻互通立交特长隧道进、出主线的车辆存在着隧道内完成车行道变换的客观需求[1]。
段萌萌等[2]以瞳孔面积最大瞬态速度值MTPA及换算视觉震荡持续时间作为评判特长隧道出、入口驾驶员视觉负荷大小的依据,施卢丹等[3]发现特长隧道灯光带对驾驶人注视特征有影响,胡立伟等[4]发现驾驶员在特长隧道内行驶时趋于选择更大跟驰距离,徐进等[5]采集自然驾驶数据分析立交进、出口区域的纵向驾驶行为特征,程学庆等[6]利用VISSIM仿真软件确定了不同设计速度下的隧道与互通立交安全间距一般值和极限值,GUNTER等[7]指出高速公路互通立交出口设置专用车道的必要性。在上述文献中,主要是针对特长隧道或互通立交的驾驶负荷影响因素和评价方法进行探讨,或通过仿真实验计算隧道与互通立交连接段间距值,通过实车试验采集毗邻互通立交特长隧道的驾驶行为数据并分析路段驾驶负荷的研究较少,对于设置隧道内实现换道需求的毗邻互通立交特长隧道整体而言,通过实车试验采集车辆运行速度、驾驶员瞳孔直径和专注度数据分析驾驶员在特长隧道内定向变道影响点至互通立交分流点行驶过程中的驾驶行为变化规律,并研究在特长隧道内设置景观带对驾驶员专注度水平的影响,可以为毗邻互通立交特长隧道内设置景观带的形式提供数据支撑,有利于提升毗邻互通立交特长隧道的运营安全水平。
1 实验
1.1 实验线路
选择四川省雅康高速公路毗邻互通立交特长隧道二郎山隧道右线作为研究对象。二郎山是成都平原进入青藏高原的第一道天然屏障,二郎山隧道被誉为“川藏第一隧”,纵坡设置为人字坡,坡度为2%~-0.5%;洞身平面设置大半径S曲线,曲线半径分别为8020 m和7980 m。雅康高速公路全线采用4车道高速公路建设,设计速度为80 km·h-1,路基宽度为24.5 m,桥隧比为93.84%,结束了甘孜藏区不通高速的历史,打通了藏区经济发展的主动脉。主要技术参数如图1所示。
1.2 实验条件
实车驾驶实验于2020年11月中旬开展,该实验路段车流量较小,实验驾驶员均可按照自身驾驶习惯按照交通法律法规自由驾驶,从雅安当地付费招募10 名男性驾驶员作为被试,考虑到眼动仪采集数据的精度,招募的实验驾驶员均满足裸眼驾驶条件,10 名驾驶员年龄分布在27~49 岁,平均年龄为35.9 岁。驾龄分布在3~16年,平均驾龄8年,驾驶里程分布在21~130 km,平均驾驶里程为65.4 km。实车车辆为北京现代自动挡轿车,实验仪器主要为Tobii Glasses 2眼动仪采集驾驶员瞳孔直径数据,前向碰撞预警系统Mobileye 630 通过CAN 总线实时读取车辆行驶速度等数据和Cirelet单导脑电系统通过蓝牙连接到MindXP 数据分析软件采集和计算专注度水平的数据。实验设备如图2所示。

图2 实验设备Fig.2 Test devices
1.3 数据预处理
将实验数据分析与导出后,当采集过程中数据丢失时间间隔小于75 ms时,采用线性插值trend函数进行数据补偿,再利用Savitzky-Golay 平滑滤波对数据进行滤波处理,可以提高光谱的平滑性,降低噪音的干扰。
1.4 评价指标
(1)瞳孔直径。瞳孔直径大小变化规律能一定程度上反映驾驶员在通过实验路段的视觉感受,表述其视觉适应性及驾驶视觉负荷程度,正常人瞳孔直径在自然光下为2~8 mm,暗环境中为4~8 mm[8]。
(2)行驶速度。行驶速度指在一定路段上车辆行驶的平均速度,是衡量该路段行驶难易程度和通行能力的关键指标[9]。
(3)专注度。美国Neurosky 公司的MindSet 设备可以提供比较准确的注意力表征值,并有良好的脑-机交互效能和用户体验。专注度可简单理解为脑电α波被抑制的程度,能够反映驾驶员注意力的集中程度[10]。
1.5 隧道特征区划分
(1)根据JTG D20-2017《公路路线设计规范》中要求隧道洞口内、外侧各3 s 设计速度行程长度范围的平、纵面线形一致原则,按照80 km·h-1的设计速度,选取3 s行程长度约为67 m,本文将实验的毗邻互通立交特长隧道划分为:进出口、正常行车、定向变道行车及出口-互通分流点段这5 段。其中,入口段长度为250 m,入口前100 m和入口后150 m;出口段250 m,出口前200 m和出口后50 m;定向变道行车段1660 m,在距隧道出口前、后100 m 处禁止变道,实验车辆在定向变道行车段进行变更车道驶向泸定服务区;出口-互通分流点段215 m,是隧道出口(渐变段起点)到互通分流点的距离。隧道内其他路段均为正常行车段。
(2)在正常行车段的部分隧道上空采用LED动态视觉系统打造洞内景观带,布设了4.3 万个LED点光源,从而形成“飘扬的五星红旗”的国旗区和“星星闪烁”的星空区等动态图案,缓解司乘人员的视觉疲劳和心理压抑感。隧道特征区如图3所示。
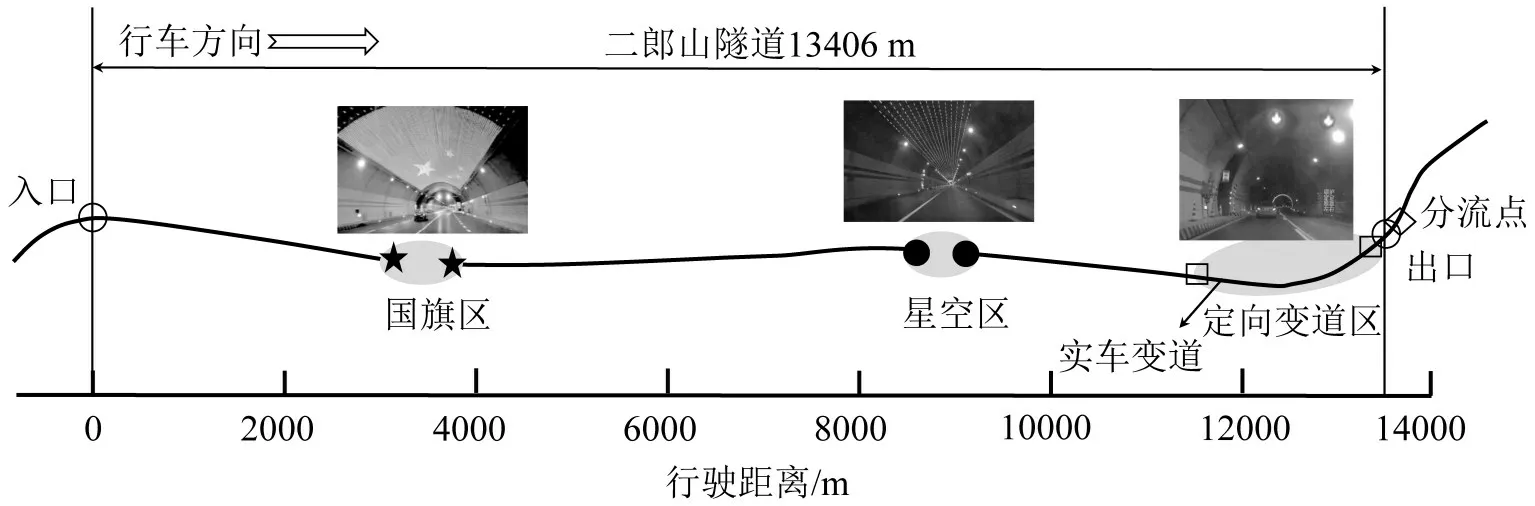
图3 隧道特征区Fig.3 Tunnel feature zones
2 实验结果与分析
在毗邻互通立交特长隧道二郎山隧道路段(全长13406 m)按照限速80 km·h-1行驶,预计需要11 min,通过分析在隧道内长时间行驶和出隧道驶向主线或匝道路段的驾驶负荷、速度和专注度等驾驶员变化特征,明晰驾驶员如何调整瞳孔直径、行驶速度及专注度来适应长时间隧道暗环境和短间距相接互通立交的改变。不同隧道特征区的实验数据特征值如表1所示,由于数据样本较大,此处选取数据采样距离为50 m,方便分析隧道全长的驾驶特性。行驶速度和专注度雷达图如图4所示。瞳孔直径雷达图如图5所示。

图4 行驶速度和专注度雷达图Fig.4 Radar diagram of driving speed and concentration
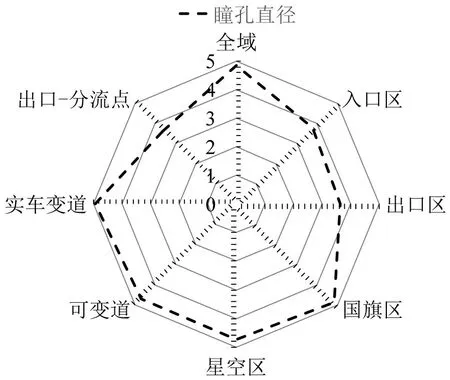
图5 瞳孔直径雷达图Fig.5 Radar diagram of pupil diameter
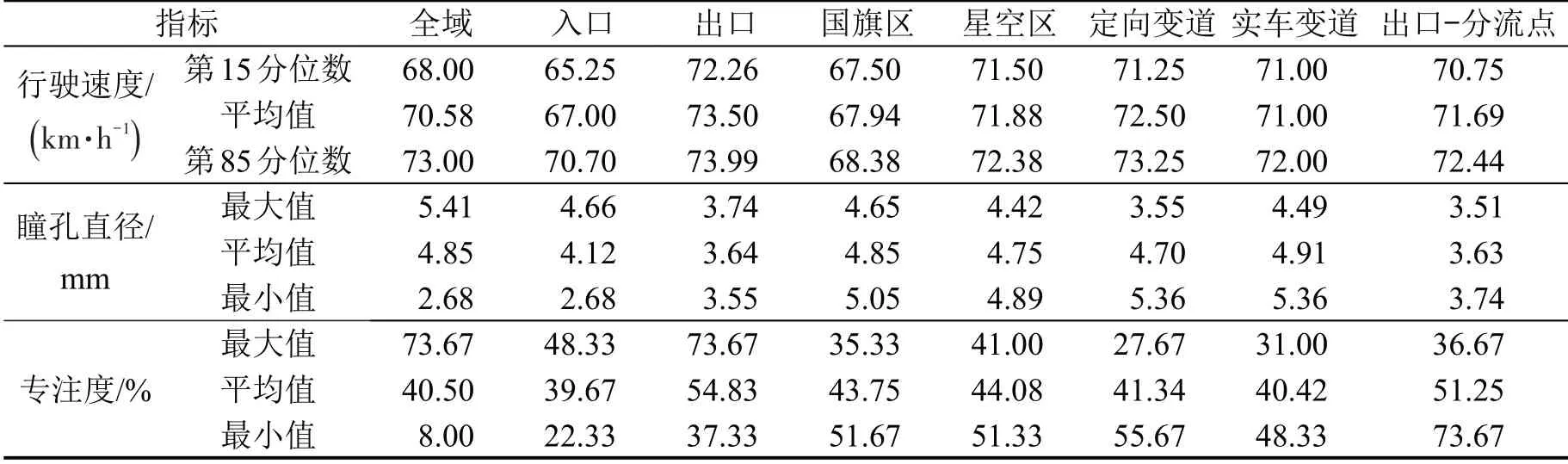
表1 实验数据统计值Table 1 Statistical values of test data
由图4可知,在隧道内的不同特征区行驶速度均维持在70 km·h-1,差异性不大;在出口和出口-分流点的专注度水平(54.83%和51.25%)明显大于其他特征区,毗邻互通立交特长隧道的出口至分流点的车道选择情况复杂,需要驾驶员提高专注水平做出正确的决策和操作。
由图5 可知,出口和出口-分流点的瞳孔直径大小刚好与专注度水平相反,其值(3.64 mm 和3.63 mm)小于其他特征区,入口瞳孔直径大小4.12 mm 也小于其他特征区,瞳孔直径的大小不仅受驾驶员心理紧张程度的影响,更与光照条件密切相关,在隧道出、入口区和出口-分流点区的瞳孔直径大小主要是受到外界自然光照环境的影响,明显小于隧道全域瞳孔直径平均值。
二郎山隧道的瞳孔直径分布散点图和均值变化曲线如图6所示,样本量为10。根据数据统计分析得到,在驶入隧道入口时,驾驶员瞳孔直径由正常路段平均值2.5 mm迅速增大至隧道全域瞳孔直径平均值4.85 mm,首次达到隧道全域瞳孔直径平均值的位置为A 点(469,4.85),即所需行驶的距离为469 m,结合隧道全域行驶速度平均值70.58 km·h-1,计算得到驾驶员首次达到隧道全域瞳孔直径平均值的适应时间为23.87 s,该值与杜志刚等[11]研究得到的对于中、长隧道暗适应时间一般不超过23 s 的研究结果一致。国旗区和星空区的驾驶员瞳孔直径均小于隧道全域瞳孔直径平均值,验证了设置洞内景观带可以缓解司乘人员的视觉疲劳。当驾驶员看到定向变道标线白色虚线后,瞳孔直径逐渐减小,在隧道出口达到最小值3.65 mm。二郎山隧道的行驶速度分布散点图和均值变化曲线如图7所示。

图6 瞳孔直径分布以及变化曲线Fig.6 Pupil diameter distribution and variation curve
二郎山隧道限速80 km·h-1,在该隧道内试验驾驶员的平均行驶速度为70.58 km·h-1。由图7可知,存在3 种不同类型的速度分布,冒险型驾驶员不断尝试突破限速值80 km·h-1行驶;由于隧道过长,保守型驾驶员以60 km·h-1的速度缓慢行驶;大部分驾驶员的行驶速度在70~80 km·h-1之间。国旗区速度均值为67.94 km·h-1,分布离散;星空区速度均值为71.88 km·h-1,分布集中;定向变道区至隧道出口的行驶环境复杂,对应速度的变化不大,维持在71~73 km·h-1之间,与普通隧道出口段速度变化规律有较大差异。
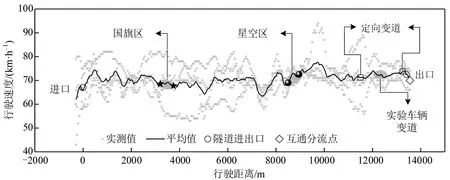
图7 行驶速度分布以及变化曲线Fig.7 Driving speed distribution and change curve
3 特征区驾驶模型构建
3.1 隧道进、出口区瞳孔直径线性模型构建
回归分析是研究自变量与因变量之间函数关系的模型,通过Origin 软件绘制在二郎山隧道进、出口处瞳孔直径大小随着与隧道洞口距离的线性拟合变化曲线如图8和图9所示。

得到隧道进口处瞳孔直径预测模型为

隧道出口处瞳孔直径预测模型为

式中:xin为与隧道进口的距离;yin为隧道进口处瞳孔直径预测值;xout为与隧道出口的距离;yout为隧道出口处瞳孔直径预测值;R2为趋势线拟合程度的指标,拟合程度越高,趋势线的可靠性就越高。
分析总结该结果,得到经验公式为

式中:p为瞳孔直径大小预测值;d为与隧道洞口的距离值;pmax为瞳孔直径最大值;pmin为瞳孔直径最小值;dpmax为瞳孔直径最大时对应的与隧道洞口的距离;dpmin为瞳孔直径最小时对应的与隧道洞口的距离;pi为瞳孔直径大小测量值;i为实时数据点;n为样本总量;α、β为修正系数,建议取0.9。
模型验证表如表2所示。

表2 模型验证表Table 2 Model validation table
核验模型准确性(计算值/实际值),模型准确性大于94%,说明式(3)可以作为隧道进、出口段瞳孔直径预测模型,即瞳孔直径的变化趋势规律受隧道灯光的影响较小,但瞳孔直径值的大小和修正系数α、β受到隧道灯光的影响。
3.2 景观带专注度等级评价
脑-机交互技术通过驾驶员的生理信号检测与监测,能及时反映驾驶员的驾驶状态与行为,Cirelet单导脑电系统通过蓝牙连接到MindXP数据分析软件得到专注度水平,分为5个等级C1~C5,专注度值域为(1,20)、(21,40)、(41,60)、(61,80)和(81,100),专注度解释为非常低、低、中性、高及非常高[12]。生理信号与驾驶行为之间建立映射关系,数据、心理特征与驾驶行为之间形成一条“驾驶行为数据链”,将离散的数据结合车辆数据和道路条件分析,揭示出驾驶员的内在心理特征,同时,映射出驾驶员外显的驾驶行为,可以为实时驾驶行为提供可量化的数据支持和操作手段,为驾驶行为提供较精确的干预点与策略,即脑电波信号的表征与解释,可以为驾驶行为在生理层面的评测提供数据与可能。驾驶行为数据链如图10所示。洞内景观带专注度等级评价如表3所示。

图10 驾驶行为数据链Fig.10 Driving behavior data link
由表3可知,国旗区专注度等级存在“低”C2和“中性”C3这2种注意状态,星空区专注度等级均为“中性”C3。说明驾驶员在国旗区的紧张状态要低于星空区,景观带国旗区效果优于星空区,同时,可以在国旗区“低”C2状态处进行人为提醒干预,使驾驶员的专注度水平得到提升。

表3 洞内景观带专注度等级评价Table 3 Concentration level evaluation of landscape belt in the cave
3.3 定向变道影响点至互通立交分流点驾驶行为规律
驾驶员驶入隧道会经历较长的暗适应,随着在隧道内行驶时间的增加,逐渐适应隧道内的暗环境,但驾驶员对隧道出口处的外部环境未知,驶出隧道需要明适应时间和快速识别判断外部环境的时间,二郎山隧道与泸定互通之间条件受限,从二郎山隧道出口到泸定互通分流点之间仅存在215 m长度的极限间距,在二郎山隧道内部的定向车道和标志标线等信息提前诱导驾驶员按照不同出行目的选择车道行驶,极限间距过短,车辆变道难度与行车风险增大,在毗邻互通立交的二郎山隧道出口需要驾驶员提高警惕,谨慎驾驶,再次确认所驶车道的正确性并做出合理操作。定向变道影响点至互通分流点驾驶行为数据如表4所示。
有驶向匝道需求的车辆,在毗邻互通立交特长隧道左侧车道行驶时,需在隧道内完成定向变道方可驶出匝道,驾驶员首次看到交通分流指路标志①后做出变道决定,需要观察变道环境寻求可变道条件①、②、③、④及等待可插车间隙⑤(信息察觉期和条件观察期),随后,调整车速和车位⑤(判断决策期),确定变道和进行变道操作⑤(变道操作期),完成变道,在目标车道正常行驶⑥并驶出隧道出口⑦,并迅速从互通匝道进行分流驶离⑧。行驶速度、瞳孔直径和专注度等指标对驾驶员的感知、判断、反应和操作等主观因素进行量化分析,由表4可知,在定向变道的整个行驶过程中,驾驶员平均行驶速度在变道前保持稳定,成功变道至目标车道后车速略微增大,驶出隧道至互通分流点段又逐渐减小;驾驶员瞳孔直径随着与隧道出口距离的减小而逐渐减小,驾驶员专注度受到周围环境的影响呈动态波动。实车变道过程如图11所示。

图11 实车变道过程示意Fig.11 Vehicle lane change process

表4 定向变道影响点至互通分流点驾驶行为数据表Table 4 Driving behavior data from directional lane change influence point to interchange diversion point
在实车变道过程中,T0时刻的车辆C驾驶员观察到①、②、③、④变道提示信息,进入定向变道信息觉察期,发现在右侧目标车道有车辆C2,此时,不满足变道条件,直至T1时刻,右侧目标车道的车辆C2在同一断面超过车辆C,进入定向变道条件观察期,当车辆C驾驶员认为等待可插车间隙满足变道条件后,进入定向变道判断决策期,随后调整车速和车位,进行变道操作,从原车道变道至目标车道,完成变道,驶向隧道出口。此变道过程与正常道路条件下左车道向右变更车道的过程相比,其变道情况更加复杂,对驾驶员的操作和判断能力有较大考验。主要体现在瞳孔直径和专注度变化规律方面,如图12所示。

图12 定向变道区内实车变道瞳孔直径变化局部放大图Fig.12 Pupil diameter of vehicle lane change in directional lane change zone
由图12 可知,驾驶员瞳孔直径由暗环境适应值逐渐增大,在变道操作期驾驶员瞳孔直径最大,完成变道后,随着与隧道出口距离的接近逐渐恢复至暗环境平衡值,说明驾驶员在变道操作期的视觉负荷和心理紧张度最大。由表4可知,驾驶员专注度呈现上升-下降-趋于平缓-下降的规律,在条件观察期,驾驶员大脑需要根据等待可插车间隙迅速反馈和做出是否变道的操作等,专注度最高,其次,在变道操作期要注意变道条件和保持安全行车间距。
在隧道内完成变道后,驾驶员在短距离内要经历驶出隧道出口的明适应问题和驶向匝道变道等变化,驾驶员的明适应时间通常为3 s,明适应距离结束后驾驶员才能恢复正常读取标志,驾驶员在经历标志判读、操作反应、调整换道至减速车道渐变段、出口确认及减速至匝道限速范围内驶出主线进入互通匝道。毗邻互通立交特长隧道出口段交通组织过程如图13所示,在隧道出口⑦至互通分流点⑧的行驶过程中,驶向主线行车道的车辆行驶速度、驾驶员瞳孔直径和专注度减小了2.74%、6.15%及50.22%;驶向减速车道⑨的车辆运行速度受到匝道限速的影响迅速减小,由隧道出口的73 km·h-1减至减速车道的50 km·h-1,降低了31.5%,瞳孔直径减小了21.66%,逐渐接近正常值2.5 mm,专注度也迅速减小46.61%。速度差大于20 km·h-1,且各项指标变化幅度较大,隧道出口⑦至互通分流点⑧路段存在较大安全风险。
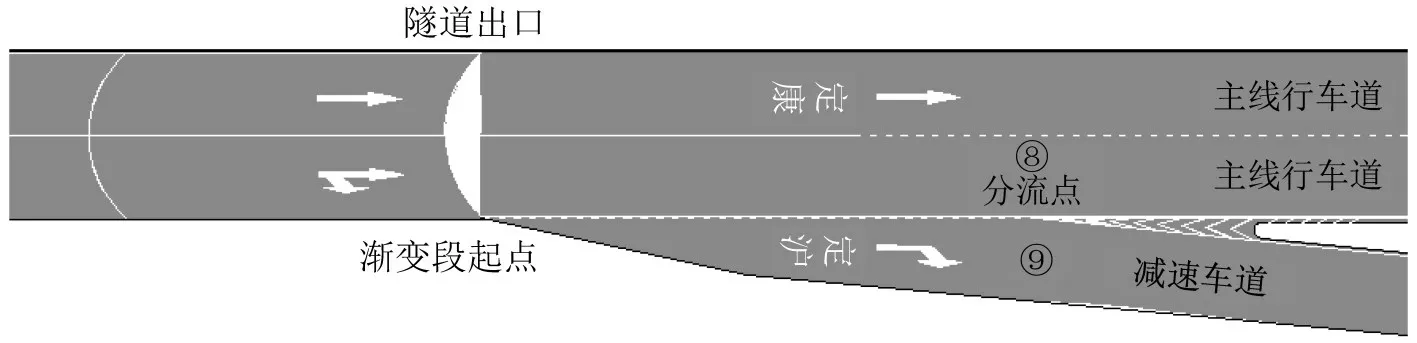
图13 毗邻互通立交特长隧道出口段交通组织示意图Fig.13 Traffic organization for exit of super-long tunnel adjacent to interchange
4 结论
通过毗邻互通立交特长隧道实车试验,对行驶速度、瞳孔直径及专注度数据进行采集与分析,分析了驾驶员瞳孔直径和运行速度的分布特性及变化曲线,发现驾驶员驶入特长隧道后瞳孔直径首次达到隧道全域瞳孔直径平均值所需的适应时间为23.87 s。在特长隧道进出口250 m 的范围内,驾驶员瞳孔直径大小和行车位置与隧道洞口的距离成正比;在隧道内定向变道影响点至互通立交分流点行驶过程中,驾驶员平均行驶速度在变道前保持稳定,成功变道至目标车道后车速略微增大,驶出隧道至互通分流点段又逐渐减小,与普通隧道出口段速度迅速增大规律有差异。
引入脑-机交互技术的专注度等级评价,评价了隧道洞内景观带国旗区和星空区的驾驶员专注度,发现国旗区的紧张状态要低于星空区,在国旗区“低”C2状态处进行人为提醒干预可提升驾驶员的专注度水平。设置隧道洞内景观带(国旗区、星空区)可以缓解司乘人员的视觉疲劳,该方法应用于隧道驾驶员专注度评价和人为干预是可行的,具有一定的研究价值。
变道操作期的视觉负荷和心理紧张度最大,驾驶员专注度呈现上升-下降-趋于平缓-下降的规律,条件观察期的专注度最高。建议隧道出口与互通立交分流点的间距过短引起的变道问题,可将渐变段起点设置在隧道内,在隧道内部增设减速车道实现安全变道和减速。