一种基于磁力耦合驱动的球形关节
2022-03-01王一霖
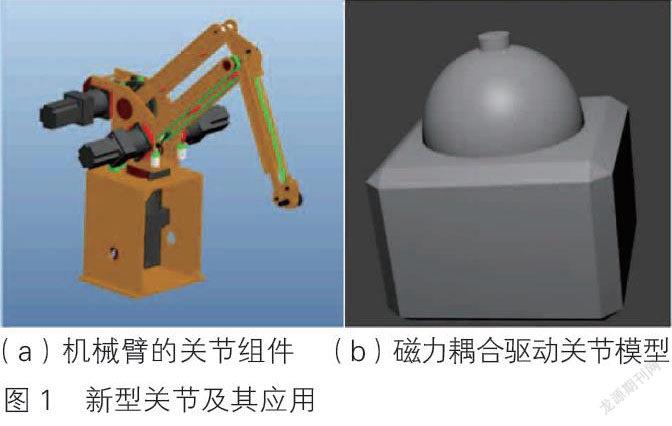

如今,机械臂等新型设备在工业制造、医学治疗、太空探索等领域起到越来越重要的作用。对于机械臂来说,关节是其关键核心组件之一。但关节的结构比较复杂,不方便重组和多角度控制。有关磁力耦合连接机构的原理启发了作者对磁力耦合在动力关节方面应用的思考,于是本项目决定设计一种磁力耦合驱动的新型动力球形关节。经过方案设计、理论分析、原理样机研制、实验验证等环节,该项目设计了球关节的结构和工作原理,并制作了模型机(图1)。
球关节的主体结构设计和工作原理设计
整体设计构想
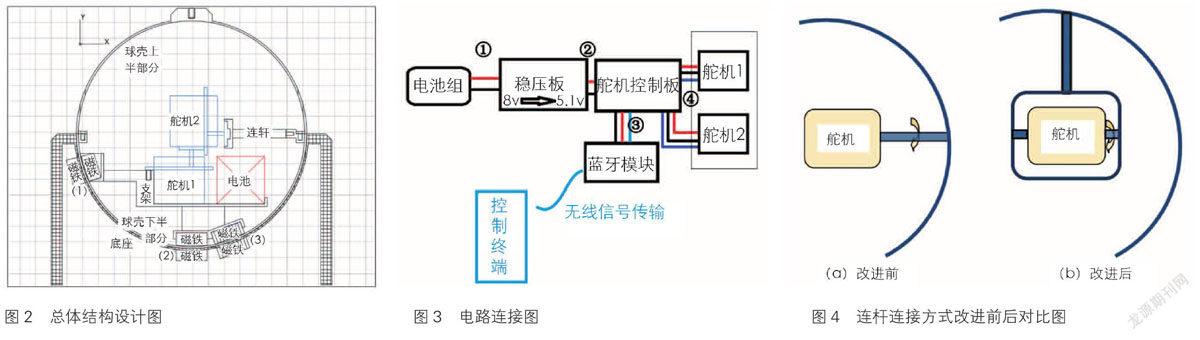
关节模型由中空的内球壳(关节头)和外球壳即球座(关节窝)组成,控制运动的舵机、支架、控制硬件等经过合理的组合均放置于球体内部,3组磁体分布于内球壳内表面及外球壳外表面的特定位置。通过遥控2个正交舵机产生动力,利用3组磁体产生的回复力矩使内球壳(关节头)相对于外球壳(关节窝)产生两自由度的角运动。总体结构设计图见图2。考虑到成本因素,样机研制过程采用工业级3D打印技术进行部件加工,选用光敏树脂耗材进行打印。未来工程化强度要求提高时,可以考虑铝合金CNC加工材料。
工作原理
该设计主要分为动力(电路)部分与磁力耦合部分,主要解决驱动电路如何通过互相垂直的2个舵机实现关节多角度运动。
驱动(电路)部分设计 驱动(电路)部分又分为电池组、稳压板、蓝牙模块、舵机控制板、舵机5个组件。电池组与稳压板组成整个装置的电源,为舵机控制板供电,再通过舵机控制板为蓝牙模块和舵机供电。构成与接线图如图3所示。
磁力耦合部分原理 当磁铁如图2关节结构所示的方式安装时,3组磁铁均分为2部分,一部分固定在底座上(外球壳外表面),一部分固定在核心系统所在的支架上且紧贴内球壳内表面。核心系统(由驱动部分与支架、连杆所组成的系统)与底座依靠磁力耦合作用连接。以底座为参,由于舵机通过连杆与球壳固定连接,则控制舵机转动就会带动连杆使球壳相对于核心系统转动,从而实现对球壳(关节头)多角度控制。
建模分析及仿真实验研究
对球形关节的磁力耦合方式及其被动柔顺性进行建模分析,并通过2个实验对其结果进行仿真实验研究。实验1:验证回复力线性近似的合理性。从实验数据可以看出,仿真的结果与线性关系符合得很好;在更大范围内进行拟合,可以发现仿真结果此时更符合二次关系。实验2:最大刚度仿真。进一步仿真得到更多数据,可以看出当偏移量在5.5mm附近时,回复力有最大值,约为26.9N。对于实际情况而言,2组磁铁最大回复力应为53.8N,若内球壳半径90mm,则最大力矩为49.4kgf·cm,若外力矩超过此值,关节将体现出被动柔顺性。
制作球关节模型机
动力部分组装
按电路连接顺序图(图3)组装动力部分。
结构安装
第1步,组装核心系统。将驱动部分固定在支架上,将连杆安装在舵机转盘上。再将磁铁固定在支架上加工的方槽中。第2步,在球壳预留的圆槽内攻丝,将球壳下半部分与核心系统通过连杆末端的插头组装到一起并固定,用螺丝将球壳上半部分和下半部分组装到一起。第3步,按总体结构设计图(图2)在底座的对应位置安装固定磁铁,装置组装完成。
实验测试改进及其问题分析
实验方案
实验测试是为了检查系统工作是否正常,及时发现问题,进行修改,测试随着装配进行,内容从基础逐步接近最终设计目标,先检查核心驱动系统,再检查机械结构的总装。
调试过程与结果
测试1:电路验证与舵机操控测试发现300°舵机出现适配问题,无操作时发生严重抖动,因此将原计划的180°和300°舵机各1台的配置改为全部采用180°舵机,调整后均工作正常。
测试2:蓝牙通信与舵机遥控将蓝牙模块插接在舵机控制板上,启动供电,打开手机蓝牙和控制应用,选择蓝牙模块对应的信号进行连接,经测试,完全可以控制。
测试3:球形关节整机测试及问题改进
将装置完全組装完毕,接通电源,将手机与蓝牙模块无线连接,在手机上对舵机进行遥控,测试机械关节在2个垂直方向的转动情况。测试结果为可以实现球壳(关节头)在2个垂直方向的转动,但显示出一些阻尼导致的迟滞,且由于受力不均的缘故,球壳在水平面内120°〜170°顺时针转动时表现最优,在其他角度和方向上转动的性能仍需进一步提升。
出现问题及改进:①连杆直接与舵机转轴连接,驱动球壳部分表现连接不够稳固,改进措施是加一框架与舵机转轴连接,连杆接在框架上,如图4所示。②球和球壳之间的摩擦对关节的灵活性影响较大。为了减小摩擦采用了很多方式加润滑剂等,最终采用的1000目的砂纸打磨,并用特氟龙胶带粘贴,但摩擦力阻力仍然影响较大,这是需要进一步解决的问题。
研究结论
本研究最终制作出的球关节模型机已具备基本的操作功能,能够对机械臂进行简单的动作控制,从理论和实践上都证实了磁力耦合在没有机械部件直接连接的情况下进行动力传输的可行性。该磁力耦合关节具有被动柔顺性,在人机交互方面将有更好的应用前景。本设计经过改进后,在智能机器人的多姿态控制,以及智能机械的多功能使用方面还会有更广泛的实用价值。
王一霖
第19届“明天小小科学家”一等奖
学科:工程学
王一霖同学热爱科学,喜欢一切与科学有关的事物,并从科学探索活动中获得了极大的快乐。为了更好地从事科学研究活动,他自学了普通物理、高等数学等课程。王一霖平时还喜欢科学制作,在课余时间自制了斯特林热机、等离子扬声器、云室、纹影仪、射电望远镜等工具。制作过程中,他既学习了科学理论知识,也提升了实践创新能力。同时,王一霖还关注天文学及未来航天技术的发展。他认为,人类的发展离不开对未知世界的开拓与探索,希望自己能够成为一名科研人员,为人类对自然的探索贡献一份力量。
