高精度二维宽波段激光告警参数计算算法
2022-02-28杜伟豪王志斌李孟委
吴 琼,张 瑞,石 金,杜伟豪,李 晓,王志斌,李孟委
(1.中北大学 电气与控制工程学院,山西 太原 030051;2.中北大学 山西省光电信息与仪器工程技术研究中心,山西 太原 030051;3.中北大学 前沿交叉科学研究院,山西 太原 030051)
引言
激光具有单频、方向性好、强度高、能量大、高度集中等优点,广泛应用于医疗美容、工业加工、航天、军事武器、通信等领域。激光告警系统是探测来袭激光,判断对方激光功能和位置的光电对抗设备[1]。激光告警仪按照其工作原理可分为光谱探测型、成像探测型、全息探测型、相干型等类型[2-4]。光谱探测型激光告警仪排列固定波长的光电探测器覆场,结构简单,但只能探测固定波长激光,且角度分辨率低[5];成像探测型激光告警仪多采用鱼眼透镜[6],漏检率低,同时采用CCD 面阵探测器,具有较高角度分辨率,但只能探测固定波长激光,无法辨别激光波长;全息探测型激光告警仪采用新型光学元件全息透镜,光学系统小,质量轻,但衍射效率较低,搭建仪器较为复杂;相干型激光告警仪根据不同干涉仪分为法布里-珀罗干涉型和迈克耳孙相干识别型,前者必须通过摆动扫描才能确定激光参数,所以难以截获单次激光短脉冲。后者虽然虚警率低、角分辨率高,但成本高、视场小[7]。
传统的光斑中心提取算法有灰度重心法[8]、圆拟合算法[9]、霍夫变换法[10]等。霍夫变换法受曲线间断影响小,不受图形旋转影响,缺点是耗时长、占内存且易受噪声干扰,精度不高;灰度重心法算法简单,计算速度快,缺点是受外界光线及噪声干扰,由于光斑形状的不规则性,会产生较大的误差,准确性较低,抗噪性差;圆拟合算法实时性较好,有较高的时间精度,缺点是精度易受随机噪声和干扰影响。在光栅衍射型激光告警系统中,探测器采集到的激光光斑较为规整,接近于圆形,相比于霍夫变换法、圆拟合算法,灰度重心法计算方法简便,耗时短。国外研究应用比较多的激光系统主要有美国的AN/AVR-2、Laser Event Recorder,以色列的LWS-20V-3 机载激光告警系统等[11],由于军事参数指标被保护,故未能查到相关参数。国内谈凯德提出基于二维向量的空间圆拟合算法,将原始光斑图像映射到二维向量空间,根据圆光斑的几何性质,组建超定方程组求解光斑中心坐标和半径,检测精度优于传统重心法与霍夫变换法[12]。哈尔滨工业大学采用光学成像激光告警系统,通过转盘滤光片分光,但由于探测器制冷问题,其质量、体积和功耗都较大[10]。在方位参数计算方面,中北大学梁赛在获得光斑中心位置后,根据原理公式计算得到俯仰角误差为0.6°,方位角误差为1.1°[13]。军械工程学院王龙分析了光栅衍射型超广角激光告警系统成像光斑特点,提出一种改进型高斯拟合算法计算光斑中心,普遍适用于强度成高斯分布光斑的中心定位[14],俯仰角平均误差为0.5°,方位角平均误差为0.5°。
针对光栅衍射型二维面阵探测数据量大、速度要求快、精度高等要求,本文提出高精度二维宽波段激光告警参数计算算法,对提高二维激光告警系统方向角度分辨率、实现高精度判定方位、探测未知激光设备并准确定位具有重大意义。
1 光栅衍射原理
激光入射光栅后,被衍射为−1 级、0 级、+1 级等,再经过镜头组聚焦在CCD 面阵探测器上,通过0 级光斑中心像素坐标位置获得来袭激光方位角参数和俯仰角参数,根据0 级和1 级光斑x方向像素坐标差值计算激光波长。通过图像数据处理,对干涉图像0 级和1 级光斑中心位置进行计算,进而获得激光波长、俯仰角、方位角信息。光栅衍射基本原理如图1所示。
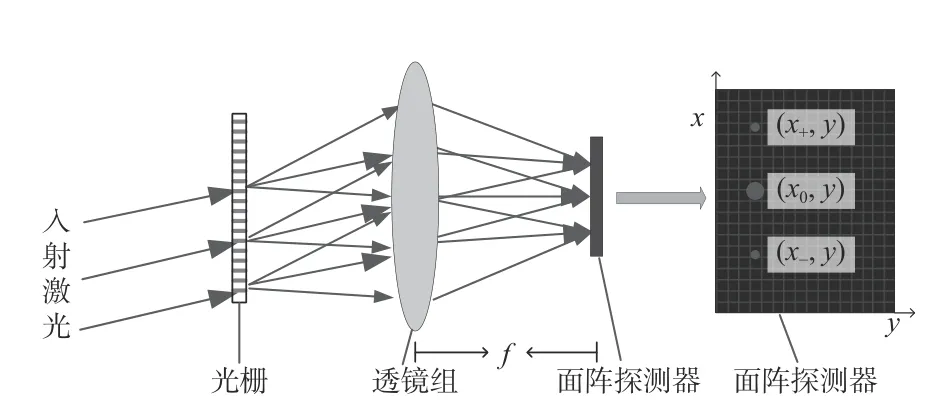
图1 光栅衍射原理图Fig.1 Schematic diagram of grating diffraction
激光入射经过光栅衍射后由镜头汇聚,形成干涉光斑并成像于面阵探测器。在x方向,入射角为α,0 级光谱位置为x0,+1 级光谱位置为x+,−1 级光谱位置为x−;在y方向,入射角为γ,入射光衍射后在探测器的位置为y。其中光栅常数为d,透镜组的焦距为ƒ,该电信号被高速信号处理电路处理后,给出波长、方向等信息[15]。在图像数据处理中,探测器左上角的点为(x,y)原点。而在实际计算过程中,以探测器中心点为原点,所以需要像素坐标变换,实验采用640(H)×512(V)探测器,即实际坐标值为(x-320,y-256)。结合光栅衍射方程和焦平面成像理论[16-17],可求得方位角α、俯仰角γ和波长λ分别为
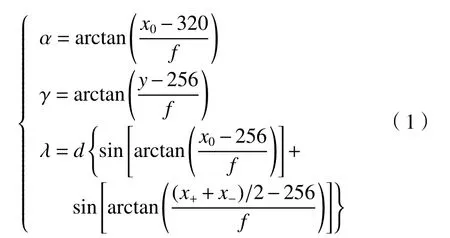
由于实验系统采用变焦镜头组,透镜组和大视场造成的畸变并不能完全消除,致使公式中ƒ的计算存在误差,且系统搭建中光学器件摆放存在误差等不定因素,使得公式计算值与真实值存在较大误差,由此,本文在计算光斑中心位置像素坐标后,采用公式拟合算法进行参数计算。
2 光栅衍射型激光告警系统
光栅衍射型激光告警系统由探测器、光栅、透镜组等构成。搭建光栅衍射型激光告警系统实验平台如图2所示。

图2 光栅衍射型激光告警系统实验平台Fig.2 Experimental platform of laser warning system based on grating diffraction
分别使用中国科学院长春光机所长春新产业光电技术有限公司生产的532 nm 激光器(型号为MGL-III-532-100 mW)、1 064 nm 激光器(型号为MILIII-1 064-100 mW)、1 313 nm 激光器(型号为MILIII-1 313-100 mW),型号为GLORIA-X150A 的氙灯,带宽为10 nm、中心波长分别为400 nm、550 nm、650 nm、750 nm、850 nm、1 200 nm、1 300 nm、1 400 nm、1 600 nm 的滤光片;探测器规格为640(H)×512(V)像元阵列,15 μm×15 μm 的像元间距;型号为BEW-10X、尺寸为Φ84×209 mm(扩展10倍)的扩束镜;光栅常数d=2.5 μm 的光栅。激光经过扩束镜后,进入旋转台上的激光告警实验系统,其中转台方位角范围为0°~360°,俯仰角范围为0°~360°,角度精度为0.01°。
本文基于光栅衍射型激光告警系统,通过FPGA控制探测器采集图像,由外部存储器接口(external memory interface,EMIF)将图像数据传输至DSP 进行图像处理,其中DSP 采用TI 公司的TMS320C6748芯片。FPGA 控制探测器采集图像,通过以太网传输数据并存储到先入先出存储器(first input first output,FIFO)中,再通过EMIF 接口将数据传输到DSP 中进行处理,最后将计算出的激光参数在液晶屏中显示,整体控制框图如图3所示。

图3 整体控制框图Fig.3 Block diagram of overall control
考虑到镜头和光栅的角度,综合视场范围为水平95°、垂直72°。由于视场较大,采集图像有畸变现象,主要是非线性桶形畸变,畸变现象随图像距离中心位置距离增大而严重,虽不影响图像清晰度,却影响成像的位置精度,给图像分析和图像测量带来误差,所以在光斑中心计算之前,需要对图像进行畸变校正处理。图像中心位置畸变为0,位置到中心位置的距离越远,畸变现象越严重,以主点周围的泰勒级数展开的前两项的数学模型进行描述,根据其在径向方向的分布位置,调节公式为

式中:(x0,y0)是以图像中心为原点,水平向右为X轴正方向、垂直向上为Y轴正方向,为坐标轴的原始像素点坐标位置;(x,y)是畸变校正后输出的像素点位置,若对应像素超出图像范围(640(H)×512(V)),则不予保存。k1,k2为根据畸变现象求出的泰勒级数,通过30 mm×30 mm 标定板平行于镜头测试的24 张测试图,所得泰勒级数计算结果为:k1=−0.4382,k2=0.1217。畸变校正情况如图4所示。

图4 畸变校正图Fig.4 Diagram of distortion correction
探测器有效探测面积为L×H=9.6 mm×7.68 mm,分辨率为640(H)×512(V)pixel,可较好地探测光谱波段范围为500 nm~1 600 nm 激光,包含可见光与红外光,图像以灰度图显示。当单色波长入射时,背景除目标光斑外含有太阳光、照明灯、反光物品等干扰信息,导致图像对比度低、成像效果差、信噪比低。通过大量所测图探寻对比度范围,发现对比度在0.75~0.9 时大多目标光斑较为清晰且基本滤除干扰图像,为简化图像数据,先提高图像对比度。本文采用的连通区域标记算法借鉴在Matlab 中bwlabel 连通区域标记函数中四联通标记算法,原始算法需要将图像二值化处理,即设定1 个阈值,灰度值小于阈值则记为0(黑色),大于等于该阈值则记为255(白色)。从上到下、从左到右遍历图像,除最左列和最上行只需判断值为255 像素的上方和左方是否存在255 灰度值像素,其他像素需判断上方或左方位置,若存在255 灰度值像素即为同一连通区域,标记图像中白色连通区域[18]。本文采用改进的二值化和连通区域算法,即阈值下的灰度值记为0,大于等于阈值的像素,保留其灰度值,将有值的像素进行连通区域标记。当连通区域灰度未达到饱和时,认定每个连通区域中最亮的像素坐标均值为光斑中心,若连通区域饱和,则认定饱和区域坐标均值为目标光斑中心坐标,再通过大量测量数据进行0 级光斑x、y所在像素位置与激光参数进行曲面拟合,进而由0 级光斑中心位置计算来袭激光方位角、俯仰角,以及根据0 级光斑和±1 级光斑x间距计算波长。在方位参数计算方面,相比梁赛俯仰角误差为0.6°、方位角误差为1.1°;王龙俯仰角平均误差为0.5°、方位角平均误差为0.5°等,本文计算结果与真实数据俯仰角误差为0.4°、方位角误差为0.2°,提高了识别激光方向参数精度。
3 实验结果与分析
搭建光学实验平台,通过氙灯和滤光片组合,可以探测500 nm~1 600 nm 中部分整数激光波长参数激光,波长误差在±5 nm 之间。本文以常用激光武器波长532 nm、1 064 nm、1 313 nm 激光器进行实验,波长唯一,实验结果更加准确。图5为不同波长滤光片下和特定波长激光器下采集的图像。
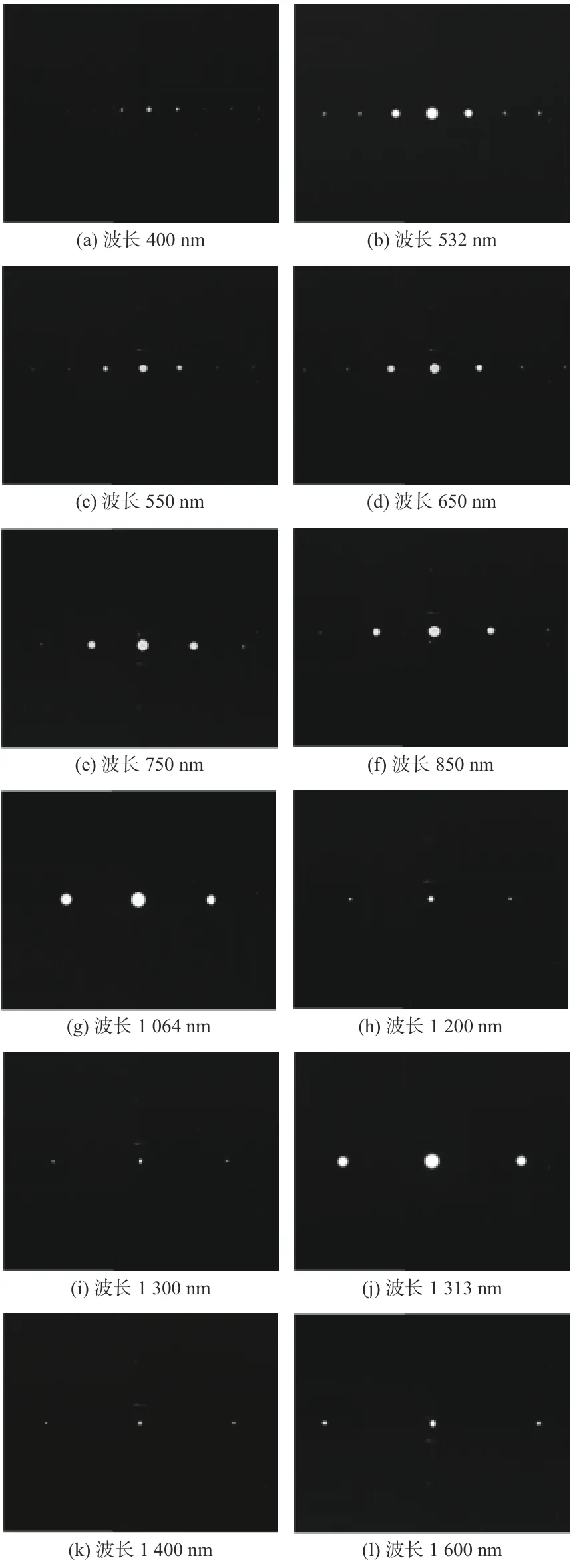
图5 不同波长采集图像Fig.5 Images acquired at different wavelengths
根据本实验系统,探测器的有效探测波长范围为500 nm~1 600 nm,由光栅衍射原理及实验结果表明,激光的波长参数只与0 级和1 级x像素坐标间距有关,通过差值可以有效提取目标光斑,降低虚警率;系统采用大视场镜头,水平视场95°、垂直视场72°,产生一定畸变。即使采用畸变校正也无法完全消除畸变。由此根据公式计算出的方位角和俯仰角数值随着距离探测器中心位置的增大而产生一定偏差,通过系统拟合数据能在一定程度上减少畸变带来的数据误差,更能贴合实际数据。
设定俯仰角γ和方位角α,进行数据采集,部分采集图像如图6所示。
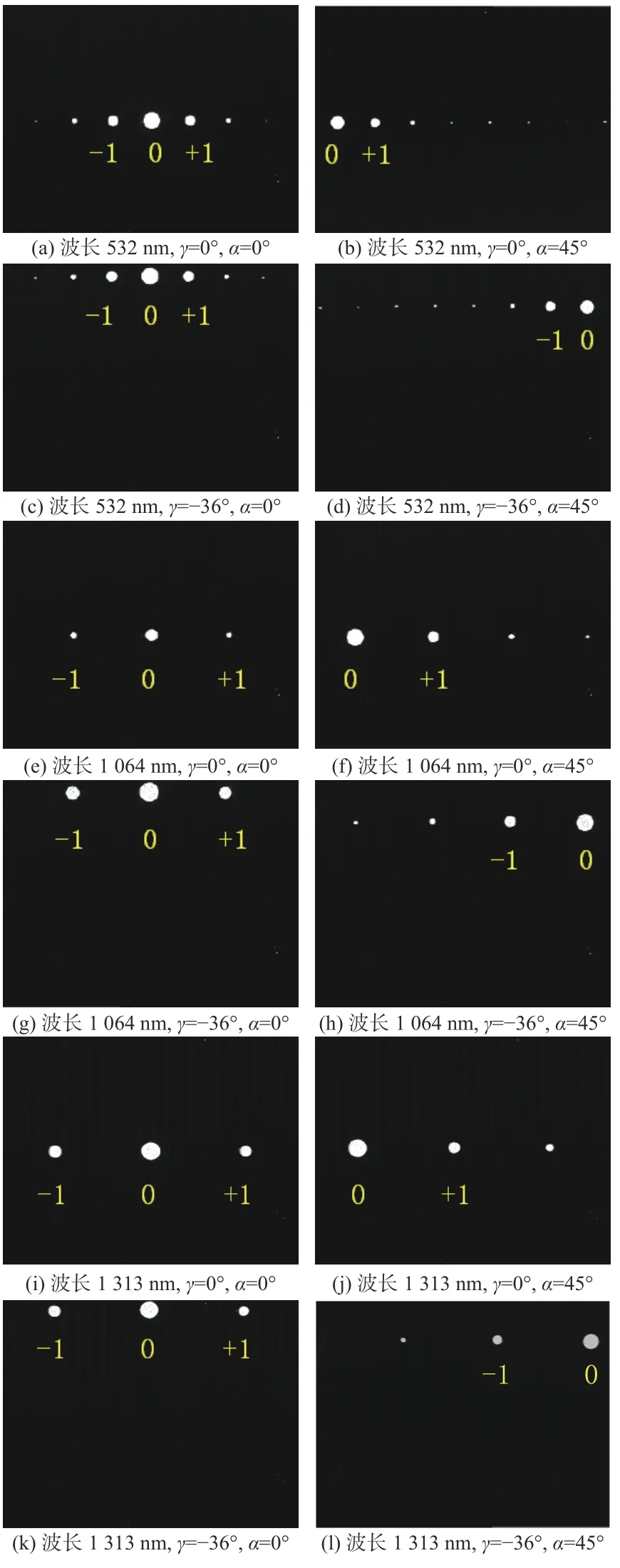
图6 部分波长不同方位角、不同俯仰角图像Fig.6 Partial wavelength images with different azimuth angles and pitch angles
以1 064 nm 激光器为例,俯仰角γ拟合曲面与像素坐标关系和方位角α拟合曲面与像素坐标关系如图7所示。
由图7(a),图7(c)和图7(e)的仿真结果可知,激光俯仰角与x、y像素坐标都有较大联系;由图7(b),图7(d)和图7(f)的仿真结果可知,激光方位角可认为只与y像素坐标有关。在实际拟合过程中,若只拟合方位角与y像素坐标关系,则误差为0.7°,误差较大;同样拟合方位角与x、y像素坐标关系,误差为0.2°,误差较小,误差数据如图8所示。方位角误差对比及拟合公式如下:

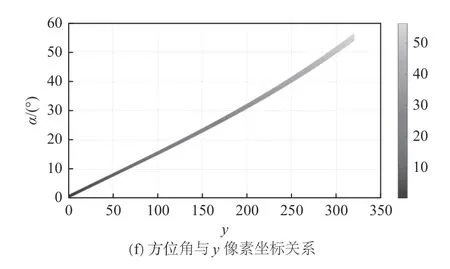
图7 激光参数与像素坐标所在位置关系拟合图Fig.7 Fitting diagram of position relations between laser parameters and pixel coordinates

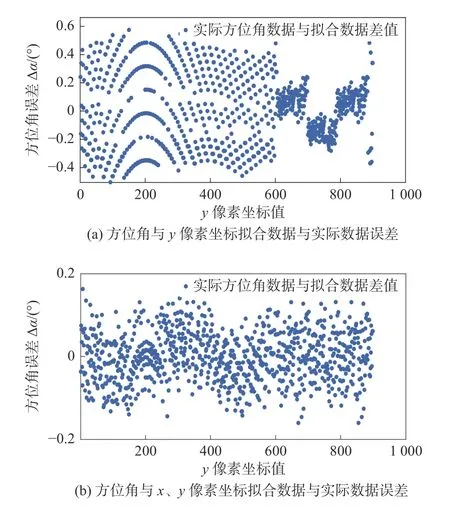
图8 方位角拟合数据与实际数据误差对比Fig.8 Errors comparison between azimuth fitting data and actual data
将采集数据与拟合数据进行数据对比,误差如图9所示。

图9 方位角、俯仰角拟合数据与实际数据误差Fig.9 Errors between fitting data and actual data of azimuth angle and pitch angle
随机采样6 组数据,参数计算结果与原始设定数据如表1所示。

表1 数据计算结果Table 1 Data calculation results
根据实验分析,数据误差主要来源于以下几个方面:畸变现象未能实现完全校正;受二值化阈值设置的影响,提取的光斑形状稍有区别,最终影响中心坐标数值。
4 结论
本文基于光栅衍射型激光告警系统,针对光栅衍射图像信噪比较低、方向计算分辨率不高的问题,提出一种改进的二值化算法和连通区域标记算法计算光斑中心,再通过大量测试图像计算0 级光斑与±1 级光斑中心像素位置,由x方向间距确认激光波长,由0 级光斑x、y像素坐标位置拟合激光参数信息,最终拟合成x、y激光参数的拟合曲面函数来计算方位角、俯仰角。搭建实验系统进行验证,对比相同位置真实数据与拟合公式计算结果,俯仰角误差为0.4°,方位角误差为0.2°,提高了二维宽波段激光告警参数计算精度。该算法可以实现高精度计算激光探测装置方向,为激光告警、光电对抗提供保障,对准确侦察敌方目标并及时做出准备方案具有使用价值。
