一种成像式亮度计校正方法
2022-02-28胡皓程曹良才
李 兵,胡皓程,闵 锐,曹良才
(清华大学 精密仪器系 精密测试技术及仪器国家重点实验室,北京 100084)
引言
亮度是表征发光物体表面明亮程度的物理量,是光度学中的关键特征量,主要测量设备为亮度计[1]。随着图像传感器的不断成熟和高性能计算机的小型化,亮度计经历了瞄点式测量向成像式测量的发展过程[2-4]。成像式亮度计(imaging luminance measurement device,ILMD)采用面阵式图像传感器作为光电探测器件,可实现视场空间分辨光度特性检测[5-6],广泛应用于车辆、船舶及飞行器等交通工具照明及驾驶舱显示组件测试[7]、公共空间及道路照明测试等领域[8-9]。
成像式亮度计的测量精度主要受3 方面因素限制:1)非线性响应。搭载理想图像传感器的成像式亮度计在接收均匀光源照射时,靶面各点像素响应值(digital number,DN)都应相同,但图像传感器在光电转换过程中受固有结构影响及掩膜误差、像素缺陷等因素限制会出现非线性响应,降低亮度值测量精度[10-12];2)渐晕效应。成像式亮度计通常选用短焦距成像物镜实现大视场空间测量,根据几何光学原理,短焦距成像物镜在像面易产生较强的渐晕效应,使像素响应值呈现由探测器中心向径向方向衰减[13-15],导致图像传感器靶面远离光轴中心位置的像素区域出现非均匀响应;3)图像畸变。短焦距成像物镜引起的图像畸变造成空间分辨图像失真,降低视场边缘亮度的测量精度[16]。因此成像式亮度计在使用前需要对非线性响应、渐晕效应及图像畸变进行严格校正。
图像传感器主要分为两类,即CCD(chargecoupled device)和CMOS(complementary metal oxide semiconductor)。由于CCD 技术成熟较早,具有高灵敏度、低噪声和高动态范围等优势,因此成像式亮度计起初多采用CCD 作为核心光电探测器件。2010年周拥军等人使用积分球作为标准亮度源对基于CCD 的成像式亮度计进行了标定,实现了不同曝光值下图像传感器灰度值及标准亮度值间的非线性关系[17]。2017年金耀辉采用基于CCD 的成像式亮度计作为探测单元搭建了近场分布光度计并研究了平场校正,在平场校正中通过对中心区域及周围区域设置不同的比例因子并经过多次采样实现了平场校正[18]。基于CCD 的成像式亮度计校正方法不断成熟,但CCD 工艺相对复杂,高性能的CCD 成本仍较高。随着大规模集成电路制造工艺的进步,CMOS 成像质量不断提高,成本不断降低,应用受到了越来越多的关注。CMOS 图像传感器主要分为彩色型和黑白型,2017年毛成林研究了黑白型CMOS 噪声问题,采用最小二乘二次拟合方法实现了图像传感器DN值非线性响应校正[10]。2021年Steinel 等人采用光谱辐射计参考值方法对基于彩色型CMOS 的成像式亮度计实现了不同工作环境下的实时校正,获取了microLED 显示设备的亮度信息[19]。2021年王士伟研究了航天CMOS 相机非线性响应问题,采用图像分块校正方法及神经网络方法对黑白CMOS 图像传感器非均匀响应噪声进行了修正[12]。
本文搭建了基于短焦距成像物镜和CMOS 图像传感器的成像式亮度计,提出了一种成像式亮度计校正方法,对非线性响应、渐晕效应及图像畸变进行校正,最后将校正后的成像式亮度计与商用分光辐射亮度计进行了对比验证实验。
1 测量原理
1.1 成像式亮度值线性拟合计算
根据光度学原理,图像传感器平面像素照度值E为

式中:dΦ表示光通量;ds表示图像传感器靶面像素面积。

图1 成像式亮度计测量原理图Fig.1 Schematic diagram of ILMD measurement

式中:f为成像系统焦距;为成像物镜透过率函数。τ(λ)在任一波长下为定值,成像物镜孔径直径D,焦距f,物距d均为常量,因此照度值E与亮度值L之间的关系为线性关系。
对于成像式亮度测量,可利用标准辐射源法对成像式亮度计进行标定,将图像传感器响应照度值E与亮度值L关系转化为不同曝光值下图像传感器像素响应DN值与均匀亮度辐射源亮度值L之间的辐射响应关系,因此(2)式可改为

式中:A0,A1,…,An均为标定系数,通常二次项以上系数影响较小,可以忽略。故(3)式可以改写为

式中:DNdark为暗电流噪声;k为线性系数[20]。成像式亮度计中的图像传感器由于固有缺陷等原因会造成像素响应DN值与测量亮度值间出现非线性关系,影响亮度值测量精度。因此可按照标准辐射源标定方法,在不同曝光值下对成像式亮度计进行多次标定,并利用最小二乘法进行线性拟合,求出暗噪声与光电探测器平均响应度,实现成像式亮度计的线性校正,解决图像传感器非线性响应并完成亮度值计算。
1.2 成像式亮度计平场校正原理
对于成像式亮度计,大视场成像物镜将造成图像传感器像面照度非均匀响应。轴上像点位置照度值表达式为

式中:n′为像方空间折射率;n为物方空间折射率;θ′为像方孔径角。
轴外像点照度值表达式为

式中:ω′为像方视场角。
比较(5)式及(6)式可以看出,轴外像点位置处照度值随视场角增大呈现由图像传感器中心位置沿径向衰减的特征,造成了图像传感器边缘像素与中心区域像素输出DN值差异,影响了系统空间分辨亮度值测量精度。利用均匀亮度辐射源对系统进行平场校正,可以修正非均匀照明引起的非均匀响应。成像式亮度计平场校正过程步骤如下:
1)暗场校正。成像式亮度计处于暗室中,在积分时间为t的情况下记录图像DN值。设(x,y)为图像传感器像素坐标,暗场参考图像表示为GB(x,y),i(x,y)为当前条件下的图像传感器光生电子数,Gof f为暗场偏置,K为转换关系。暗场校正表达式为

2)明场校正。利用均匀亮度辐射源均匀照明场X0垂直照明成像式亮度计完整视场,采集明场参考图像GR(x,y),设各像素响应率为η(x,y),明场图像表达式为

3)计算像素响应率。像素响应率表示均匀光源照明下,图像中某像素点的DN值与像素点的最大DN值之比,表达式为

4)图像校正。设待校正图像为G(x,y),校正后输出图像为X(x,y),待校正图像与校正图像关系为

进一步公式变换,校正后输出图像表示为

1.3 成像式亮度计畸变校正原理
对于一台理想的成像式亮度计,图像传感器采集的空间分辨图像不应发生畸变,但由于成像采用了短焦距物镜,其径向曲率及装配加工误差会导致桶形畸变,这种畸变越靠近视场边缘,畸变程度越剧烈。图像畸变将降低空间分辨亮度测量精度,因此需要对搭载短焦距成像物镜的成像式亮度计进行畸变校正。
对于搭载短焦距成像物镜的成像式亮度计而言,可用图像坐标系原点的泰勒级数展开项的前3 项描述(xdr,ydr)点处径向畸变,可表示为

式中:(x,y)为径向畸变校正后的图像坐标;k1、k2、k3为畸变校正系数;。
切向畸变在透镜与成像平面不平行时就会产生,类似于透视变换。图像坐标系中(xdt,ydt)点处切向畸变校正模型为

式中:(x,y)为切向畸变校正后的图像坐标;p1、p2为切向畸变校正系数。
通过采集多张棋盘格标定靶图像,计算k1、k2、k3、p1、p2校正系数,可根据(12)式和(13)式求解图像坐标畸变校正后的真实坐标。
1.4 成像式亮度计校正流程
成像式亮度计校正流程如图2所示。首先利用均匀亮度辐射源对系统进行线性校正,获取像素响应DN值与标准亮度值L的线性关系。利用均匀亮度辐射源照明成像式亮度计并采集明场图像,在黑暗条件下采集暗场图像,根据平场校正原理进行平场校正,获取平场校正矩阵。利用棋盘格标靶对系统采集多张图像并进行畸变校正,获取畸变校正矩阵。线性校正系数、平场校正矩阵及畸变校正矩阵构成校正文件,可对成像式亮度计进行校正,修正图像传感器及短焦距成像物镜对系统造成的空间分辨亮度值测量影响。

图2 成像式亮度计校正方法流程Fig.2 Flow chart of correction method of ILMD
2 测量装置组成
实验搭建的成像式亮度计结构原理如图3所示。成像物镜收集待测发光物体的空间分布辐射能量,经过视觉匹配函数滤波器进行光度特性修正,CMOS 图像传感器由电源模块供电,对发光物体进行单次或连续采集,微处理芯片处理后可直接输出空间分辨亮度图像。上位机软件实现系统曝光时间、增益和偏置等参数设置,同时实现亮度图像显示、分析及存储等功能。

图3 成像式亮度计结构原理图Fig.3 Schematic diagram of ILMD structure
成像式亮度计结构示意图如图4(a)所示,样机如图4(b)所示。成像物镜焦距f=12 mm,最小物距为dmin=180 mm。图像传感器为约200 万pixel的1/1.2 英寸(21.17 mm)CMOS 感光图像传感器,像素尺寸为5.86 μm×5.86 μm,靶面尺寸为11.52 mm×7.03 mm,位深16 bit,最大DN值为65 535。

图4 成像式亮度计结构及样机示意图Fig.4 Schematic of structure and prototype of ILMD
本系统接收视场角表示为FOV=2arctan(w/2f),其中FOV 表示透镜接收视场角,w为图像传感器靶面宽度。经计算,本系统的FOV=51.28°。根据几何光学原理,焦距、视场大小及物距的关系为f=w·d/Ds,其中Ds为发光体直径,可知在dmin=180 mm处,本系统可对最大直径为105 mm 的发光体进行空间分辨亮度测量。
实验中成像式亮度计所用的视觉匹配函数滤波器如图5(a)所示。图5(b)中虚线为视觉匹配函数滤波器的光谱响应曲线y¯(λ),图5(b)中实线为CIE1931 亮度值匹配函数y¯ref(λ)[21]。
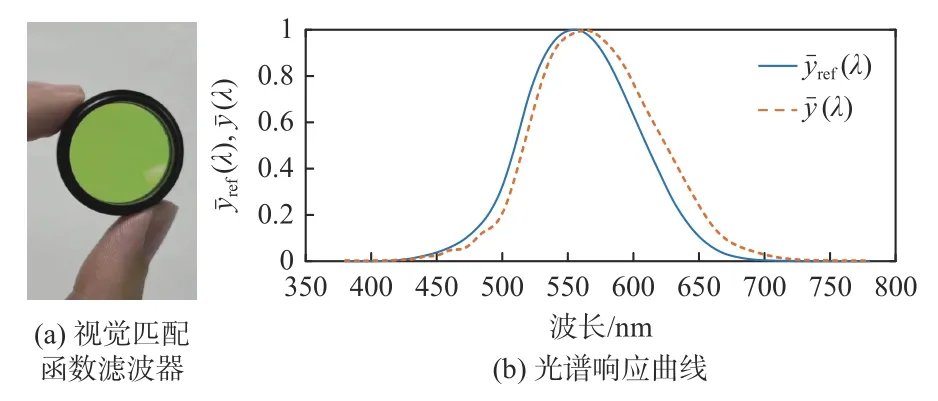
图5 视觉匹配函数滤波器及其光谱响应Fig.5 Visual matching function filter and its spectral response
3 实验结果与分析
3.1 线性测试与校正
线性校正是利用均匀亮度辐射源对CMOS 图像传感器的非均匀响应进行修正。实验中使用的均匀亮度辐射源为OL-455-6-1 型可调谐积分球亮度标准源[9],亮度值调谐范围为0.000 1~50 000 cd/m2,亮度均匀性>98%,亮度准确性±0.02%。成像式光度计垂直放置于均匀亮度辐射源出光口位置,利用均匀照明场进行线性测试。实验中,均匀亮度辐射源起始亮度值为5 cd/m2,亮度值间隔为5 cd/m2,最大测试亮度值为75 cd/m2。待校正成像式亮度计选取1 ms、2 ms、4 ms、8 ms、16 ms、32 ms、64 ms、128 ms 为积分时间进行亮度值测量,记录每个曝光值下的DN值并利用最小二乘法将每个积分时间下DN值与均匀亮度辐射源照明场亮度值进行线性拟合。
各积分时间下测量DN值与标准源亮度值线性拟合结果如图6所示。积分时间为128 ms 时,由于存在过曝光的问题,线性度最差。利用线性相关系数R值判别各积分时间DN值与标准源亮度值线性拟合的线性度,可以发现积分时间为2 ms时的线性度最高,R2=99.87%,线性度表达式为:。
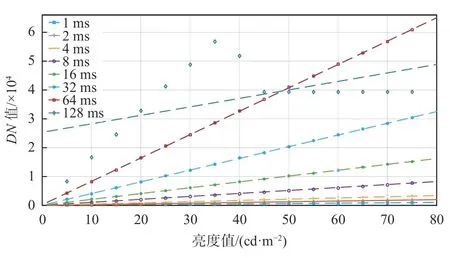
图6 成像式亮度计线性校正曲线Fig.6 Linear correction curves of ILMD
3.2 平场测试与校正
平场校正中需要利用成像式亮度计分别采集暗场图像及明场图像,实验中将成像式亮度计置于全暗条件下直接曝光获取暗场图像,如图7(a)所示。采集明场图像时所用的均匀积分球光源直径1.5 m,亮度均匀性为98%,将均匀积分球光源垂直于成像式亮度计放置并照明完整视场范围,采集的明场参考图像如图7(b)所示。根据(9)式计算图像传感器靶面各点像素响应效率η(x,y)。

图7 平场校正参考图像Fig.7 Reference images for flat-field correction
为验证平场校正效果,选取图8(a)作为待校正图像,图8(c)为该图像边缘强度值分布,可以看出未经平场校正的图像边缘明显存在照度衰减现象。图8(b)为平场校正后图像,边缘强度值如图8(d)所示,平场校正后图像均匀性明显改善。
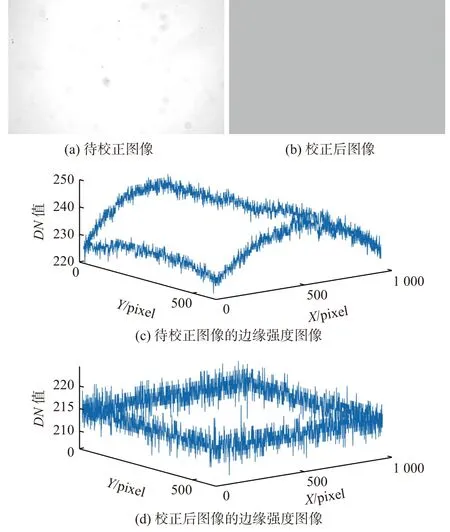
图8 平场校正前后对比图像Fig.8 Contrast images before and after flat-field correction
3.3 畸变测试与校正
图像畸变的本质是像素坐标值发生偏移导致CMOS 图像传感器采集的数字图像发生扭曲失真。实验中,首先利用所搭建成像式亮度计采集15 幅任意位置、任意角度下边长为4 cm×4 cm棋盘格标定靶图像数据,如图9所示。算法提取棋盘格标记点坐标,计算真实标记点的像素坐标,利用棋盘格标定板的正方形内边框确定标定板世界坐标系和图像传感器像素坐标系的轴线分布,使得每个标记点实际圆心的世界坐标与图像传感器像素坐标一一对应,经计算,径向校正矩阵为:切向校正矩阵为:将径向校正矩阵及切向校正矩阵带入(12)式及(13)式,对待校正图像进行像素坐标遍历修正,可获得畸变校正亮度图像。

图9 采集的15 幅棋盘格标定靶图像数据Fig.9 15 pieces of checkerboard calibration target image data
4 与国外仪器的比对验证
实验中选用的商用对比仪器是日本Konica Minolta 公司的CS2000 型分光辐射亮度计,该仪器采用分光器件测量发光物体光谱分布,可实现亮度特性测量及颜色特性测量。该仪器光谱测量范围为380 nm~780 nm,波长分辨率为0.9 nm/pixel,亮度测量范围为0.000 5 cd/m2~5 000 cd/m2,亮度测量精度为±2%,亮度测量重复性为0.15%(0.05 cd/m2以上)。实验所使用的CS2000 型分光辐射亮度计在校正周期内。
将本实验所搭建的成像式亮度计与CS2000型分光辐射亮度计同时测量同一均匀液晶显示屏。利用测量相对误差评价测试结果,计算方式为

实验中分别测量了屏显白光、红光、蓝光及绿光时的亮度值。结果显示各屏显颜色状态下,本实验所搭设的成像式亮度计与商用CS2000 型分光辐射亮度计的亮度测量相对误差均小于±2%,证明了本文所提出的一种成像式亮度计校正方法能够实现亮度测量值校正。
5 结论
本文搭建了基于视觉匹配函数滤波器的成像式亮度计,针对系统中存在的CMOS 图像传感器非线性响应问题,利用可调谐标准亮度辐射源测试了CMOS 像素响应值与亮度值间的线性关系,并利用最小二乘法对线性关系进行了拟合修正。针对短焦距成像物镜造成图像边缘照度值衰减问题,通过利用明场及暗场参考图像计算像素响应率,补偿了图像传感器边缘像素响应值。同时,针对短焦距成像物镜引起的图像畸变问题,通过几何坐标标定法获得了畸变校正系数,进一步提高了系统亮度测试精度。最后,将本文搭建的成像式亮度计与商用Konica Minolta 公司的CS2000 型分光辐射亮度计进行了对比测试,结果显示亮度测量相对误差小于±2%,说明通过本文提出的一种成像式亮度计校正方法可对基于CMOS 图像传感器及短焦距成像物镜的成像式亮度计进行亮度测量值校正,实现高精度空间分辨亮度测量。
