深中通道沉管隧道基槽整平水下定位技术研究
2022-02-25王崇明徐龙达刘海英
王崇明,徐龙达,刘海英,秦 建
(1.交通运输部天津水运工程科学研究所,天津 300456;2.海洋石油工程股份有限公司,天津 300461;3.天津水运工程勘察设计院有限公司 天津市水运工程测绘技术重点实验室,天津 300456)
深中通道连接广东省深圳市和中山市,是世界超级大的“桥、岛、隧、地下互通”集群工程,项目北距虎门大桥30 km,南距港珠澳大桥约38 km,线路全长约24 km。深中通道采用东隧西桥的方式,主线桥梁总长约17.2 km,海底隧道全长6 845 m,其中沉管段长5 035 m,海中设置东西两处人工岛[1-4]。沉管段划成32个管节,其中S08标段负责靠近深圳侧的9个管节的施工。
1 概述
沉管段基础处理是沉管隧道的关键技术之一。深中通道是国内首次采用钢壳混凝土沉管隧道结构的项目,沉管管节具有超宽、变宽、深埋等技术特点,因此采用先铺法施工。沉管的基床设计成带状垄沟的形式,既可以减少用料并缩短工期,又可以作为管节沉放时水和回淤物的分散通道,在有局部高点时基础还可以有自我调节的空间[5]。
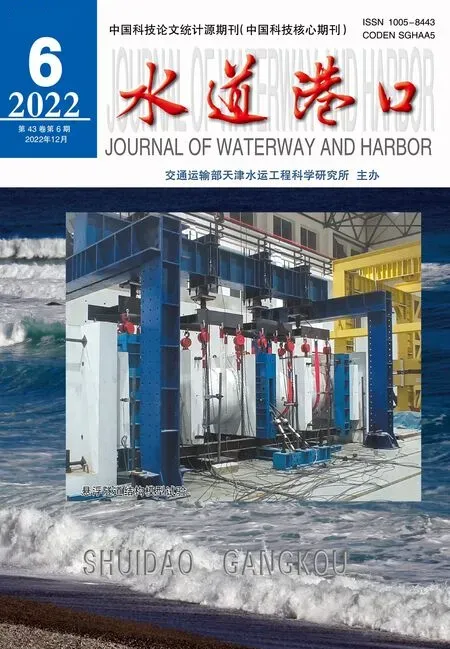
深中通道S08标段整平船“重任801”是一艘钢质、中心开孔带大月池、带碎石整平和清淤装置的“回”字型整平船,船长62 m、宽55.6 m,月池长42 m、宽38 m、型深6.5 m;整平架长37 m、宽30 m,位于月池内部,如图1所示。整平架是一种座底式的长方形钢结构框架,由4根液压支腿支撑在海底,框架上设置由大车和小车组成的行走装置,行走装置与投料装置相连。整平架通过钢缆与整平船连接,通过绞车实现整平架的提升和下降。定位监测传感器安装在整平架上,通过电缆集成并传输至控制室。

图1 整平船“重任801”
整平船主要由测量监控系统、外部供料系统、甲板供料系统、整平架升降装置、整平架搁置装置、整平架姿态调整装置、液压管线车、泥管绞车、液压桩腿装置、整平架及整平装置、控制系统、清淤系统等组成,最大整平范围为30.2 m×22.8 m。作业时,整平船在锚泊状态下就位后,将月池内的整平架下放至海底基床,通过调节4个液压支腿的伸缩使料斗口达到设计标高。碎石经由皮带输料装置转运至天车的投料装置,再经由连接软管自由下落至水下整平架的整平料斗内。控制天车的投料装置与水下整平架的料斗同步运动,在整平架内部范围内进行“S”型碎石整平作业。
由于整平架一次整平范围不能覆盖一个管面的底面,因此采用分幅错缝搭接的整平形式,对于长165 m的标准管节,碎石基础沿管节轴线方向分成7个隔断,每个隔断沿宽度方向又分为2幅,共14幅;对于长123.8 m的非标准管节,碎石基础沿管节轴线方向分成5个隔断,每个隔断沿宽度方向又分为2幅,共10幅。图2所示为标准管节的基础形式。

图2 深中通道标准管节基础形式(单位:cm)
由于采用分幅搭接的基础形式,平面位置偏差过大会导致相邻两幅之间距离变化,距离过近易产生浅点,距离过远易产生较大空隙。此外,整平船和整平架之间采用钢丝绳的柔性连接方式,整平架的定位只能采用水下定位的方式。整平平面定位精度要求为±20 cm,为实现这一目标本文研究了一种基于长基线水下声学定位的方法,长基线LBL是当前水下声学定位精度最高的一种,对其定位精度进行了验证。
2 水下定位方法
水下定位通常采用声学方式,分为长基线、短基线和超短基线三种形式,其中以长基线方式的定位精度最高。长基线水下定位系统LBL是一种大型综合水声设备,典型的LBL定位系统一般由三大部分组成,即安装在水面母船的换能器及数据处理系统、安装于定位目标上的定位信标以及布放在海底的由多个信标组成的海底基阵。换能器用于向海底基阵发送遥测指令,并接收来自海底基阵的返回信息,以及用于向海底基阵发出测距询问声信号并接收其应答声信号,通过这种“询问-回答”,记录询问时刻和各阵元应答信号的到达时刻,利用声波到各阵元的往返时间确定各阵元与定位信标的距离,通过距离交汇获得目标的位置[6-10]。
整平船在隧址进行整平作业前,需要对自然海底进行深挖并按一定比例放坡,形成沉管沉放安装的基槽。基槽是一条狭长的深槽,设计坡比为1:7和1:5,本研究中通常比自然海底低15 m左右,而且边坡还存在局部失稳的情况,不利于海底基阵信标的布设。此外,整平作业中还会涉及到起抛锚作业,锚缆极易刮碰基阵信标。由于整平船经常移位,基阵信标布设会影响整平作业效率。综上所述,在海底布设基阵信标不适宜整平作业。
针对整平作业的实际情况,将基阵信标布设在整平船底部且倒置安装,使基阵信标的换能器向下发射。在船舶月池的每个角点上布设一个信标,信标超过船底1.5 m。在月池一侧布设长基线系统的换能器及姿态传感器,在整平船中控室顶部安装GNSS定位定向系统。整平船下水前完成GNSS天线、基阵信标的偏移量测量,建立整平船的船型坐标系,并对船舶艏向和姿态传感器进行校准。整平船下水后,4个基阵信标相对位置固定,可以看做是一个可移动的固定基阵,其绝对位置由GNSS和姿态传感器推算得到。
在整平架上安装定位信标,使定位信标向上发射,这样就可以实现交会定位,如图3所示,“基阵”表示基阵信标,“信标”表示定位信标。整平架预制完成后下水之前,在其框体上选取合适位置安装4个定位信标,测量并建立整平架船型坐标系,测量4个定位信标的偏移量。通常情况下2个定位信标就可以实现整平架的定位和定向,另外2个既可以当做备用,也可以增加多余观测进行平差处理,从而进一步提高整平架的水下定位精度。

图3 长基线交会定位方法示意图 图4 水下定位系统组合安装示意图
3 精度验证方法
由于是首次采用这种倒置长基线的方法对整平架进行定位,因此需要对其定位精度进行测试,验证是否满足±0.2 m的限差要求。采用RTK GPS的方法进行长基线定位精度的验证,具体做法如下。
在整平架一侧设置两个出水测量杆,在出水杆顶部各装一个RTK GPS天线,实现整平架的定位定向。出水杆的结构按照对抗3节流速设计,确保在水中稳固,减小晃动导致的定位误差。在整平架框体上安装姿态传感器,测量整平架的横倾和纵倾并参与运算。GPS天线同样也是整平架下水前在陆地进行观测,并对姿态传感器进行校准。
此外,为进行水下定位对比试验,整平船上也安装了超短基线水下定位系统USBL,采用长基线系统的GNSS进行水上定位。姿态传感器同长基线换能器和超短基线换能器组合安装在一起,如图4所示,整平船入水前在陆地采用全站仪完成了超短基线和姿态传感器的安装校准工作。在整平架上安装了2个超短基线定位信标,其偏移量在标定长基线定位信标时一并进行了测量。
水下定位精度验证均以RTK GPS作为参考。整平船上的GNSS定位定向仪接收RTK差分信号,作为水下定位系统的绝对位置来源。根据长基线和超短基线定位信标的偏移量,结合姿态传感器的数值,由整平架出水杆顶部RTK GPS推算得到的长基线和超短基线定位信标的绝对坐标,作为水下定位精度比较的基准。将每一信标水下定位得到的坐标与RTK GPS推算的坐标进行比较分析,验证长基线和超短基线水下定位系统的精度。
4 定位结果分析
2021年3月整平船在深中通道隧址进行海试,海试过程中对水下定位精度进行了测试验证。水下定位作业前,测量声速剖面输入到长基线和超短基线定位系统。将定位信标的实测位置与RTK GPS推算的实际位置之间的距离作为定位偏差,进行数据统计绘图,4个信标的偏差如图5~图8所示。

图5 长基线信标1偏差数据统计 图6 长基线信标2偏差数据统计

图7 长基线信标3偏差数据统计 图8 长基线信标4偏差数据统计
将4个长基线信标的定位偏差进行统计,如表1所示。4个长基线信标定位的平均偏差为9.2 cm,偏差值的平均中误差为4.2 cm,定位误差小于20 cm。

表1 长基线定位统计信息
按照同样的统计方法对超短基线定位信标进行数据统计,如图9、图10和表2所示。2个超短基线信标定位的平均偏差为18.3 cm,偏差值的平均中误差为4.8 cm,定位误差小于20 cm。

表2 超短基线定位统计信息

图9 超短基线信标1偏差数据统计 图10 超短基线信标2偏差数据统计
考虑到整平船和整平架的实际情况,对长基线定位精度进行分析如下:
(1)长基线声学基阵的绝对位置由GPS RTK提供,其平面定位误差约为±20 mm。
(2)由GPS天线至声学基阵的位置推算需要姿态传感器进行运动补偿,姿态传感器精度为0.01°,按照月池最远斜距50 m计算,其误差约为±9 mm。
(3)GPS安装在整平船上,用全站仪进行标定,测量误差约为±5 mm。
(4)长基线的声学基阵安装在内侧月池的底部,整平船下水前采用全站仪测量了基阵安装基座的偏移量,测量误差约为±5 mm。
(5)声学基阵的安装支架由潜水员在水下通过螺栓固定在安装基座上,其安装误差预估为±10 mm。
(6)长基线水下测量定位受声速、噪声、深度、遮挡等多种因素的影响,其中以声速的影响最为显著,长基线的基阵和信标都配备了声速传感器,综合考虑上述因素测量误差会达到约±80 mm的水平。
(7)整平架上长基线信标位置采用全站仪进行标定,其测量误差约为±5 mm。
综上所述,长基线平面定位误差σP为
长基线误差分析与实测结果吻合。
5 结论
经过隧址的原位海试,得到长基线定位精度优于10 cm,超短基线定位精度优于20 cm。即使考虑RTK GPS的定位误差,长基线系统的定位精度仍然可以优于20 cm,可以满足整平架水下定位的精度要求。将长基线基阵信标以倒置的方式安装在整平船底,免去了海底基阵布设工作,减小了整平过程中基阵变动的风险,在保证定位精度的基础上可以明显提高整平作业效率。超短基线可以作为检查和备用的定位手段,对长基线是一个有益的补充。
深中通道沉管隧道位于珠江口内伶仃洋,涨落潮使得淡水和海水混合交叉,会影响声速剖面的变化。由于本次水下定位精度测试时间有限,未能测试出声速突变对水下定位的影响。在后续实际整平作业时,定位过程必须实时监测声速剖面的变化,及时进行声速剖面改正,从而保证定位精度满足设计要求。