基于结构方程的单位小汽车通勤合乘意向分析
2022-02-25丁昱杰张凯张龄允卢海鹏
丁昱杰、张凯、张龄允、卢海鹏
(南京信息工程大学自动化学院,江苏 南京 210044)
0 引言
随着我国城市化发展速度的不断加快,私家车保有量迅速增加,城市道路拥堵的问题也日益加重。在这种背景下,汽车合乘应运而生。私家车相比于公共交通出行,在舒适性、灵活性方面具有优势。但是小汽车出行占据大量的道路通行空间,使得空载率过高。国内关于单位员工间的私家车合乘研究较少。大多数集中于利用算法解决路径、定价、车辆调度方面的问题,魏军奎[1]通过使用聚类算法和生成算法对OD 数据进行分析处理,研究其有效性。李金洋[2]通过对比不同算法,分析了模型与算法的有效性和求解效率,总结出合乘出行具有明显优势。很少从合乘者的角度出发,挖掘内在影响因素。针对以上问题,提出单位小汽车通勤合乘是一种基于常规合乘的新型合乘方式,通过该出行模式降低一人一车模式的空驶率,基于顾客满意度模型,实现长期稳定的合乘关系模式。
1 数据获取
1.1 问卷设计
为了全面地对单位小汽车通勤合乘意向行为进行分析,问卷共设置了23 个观测变量。采用网上问卷调查的方式,最终得到了413 份有效的问卷样本。所有量表均使用李克特五级量表,范围从“非常不同意”至“非常同意”,最大值为5,最小值为1。变量定义和描述见表1。

表1 变量定义及描述
1.2 研究假设
计划行为理论(TRB)是由Icek Ajzen 提出的用于社会心理学解释态度与行为之间关系的理论,从态度行为论,引入中介行为意图、自变量主观规范,形成理性行为理论,再引入自变量认知行为控制,形成计划行为理论。该理论认为人的行为是经过深思熟虑计划的结果。
引入了顾客满意度指数模型中的变量,顾客满意度指数模型(ACSI)处于一个相互影响相互关联的因果互动系统中,顾客即为有意向参与合乘的合乘者,该模型解释整个合乘过程与整体满意度之间的关系。主要选取感知价值、感知质量、顾客抱怨这几个变量。
2 数据分析
2.1 问卷的信效度检验
2.1.1 信度分析
采用Cronbach's α 测量问卷的内在信度,以检验问卷的可靠性和可信性,反映被测数据真实程度的指标。
经计算,感知价值的Cronbach's α 值最低,为0.798>0.7,满足条件。说明该问卷的内部一致性比较高、数据可靠性较高,问卷具有良好的信度,可以作为研究工具。
2.1.2 效度分析
通过探索性因子分析(EFA)、验证性因子分析(CFA)、收敛效度和区分效度多维度检验问卷,综合判断量表是否具有较好的建构效度。
通过KMO 值和Bartlett 球形检验判断量表是否满足因子分析的条件,以检验相关矩阵中各变量间的相关性。结果表明:调查数据的KMO 值为0.905>0.7(标准),Bartlett 球形检验值为6324.209,数值比较大,Bartlett P 值为0.000<0.01,说明该问卷适合进行因子分析。
接着进行因子分析采取的是主成分分析法,结果显示:旋转累计平方和是79.51%,大于60%,各变量的因子载荷均高于0.6,说明提取的7 个因子包含的信息较全面,且未出现双重因子负荷均高的情况,各观测变量按照理论预设聚合到各维度下。综合以上分析说明,选取的变量比较科学、合理。
接着使用AMOS 软件对量表进行验证性因子分析(CFA),首先根据上面探索性因子分析结果建立验证性因子模型。
结果见表2,AMOS 输出指标卡方与自由度之比χ2/df=1.428<3,说明模型拟合较好。适配度指数(GFI)=0.941,调整的适配度指数(AGFI)=0.923,基准适配指数(NFI)=0.954、非规范拟合指数(TLI)=0.983和比较适配指数(CFI)=0.986,以上数值越接近1,模型适配度越好。近似误差均方根(RMSEA)数值越小,说明模型拟合程度越佳,RMSEA 为0.032<0.05。综上分析,验证性因子分析各项指标均已达标,模型总体拟合度较好(见表2)。
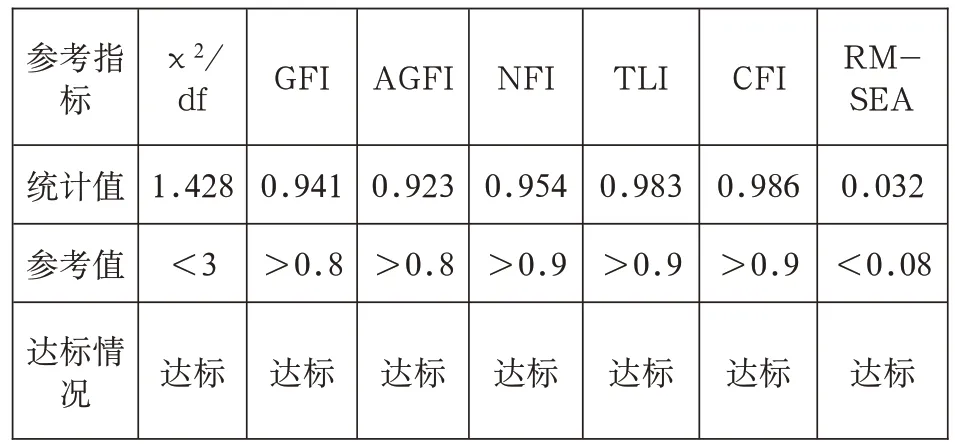
表2 模型拟合指标
由验证性因子分析结果可知,各题项因子载荷值在0.7~0.9,说明收敛效度较高;各维度的组合信度(C.R.)均大于0.7,达到标准,其中感知价值(0.801)最低;平均提取方差值(AVE)均大于0.5,达到标准,其中感知价值(0.574)最低;显著性概率P<0.001。说明整体量表中7 个潜变量与各测量指标变量存在显著的关系,整体量表结构模型构建情况非常好。
3 模型验证与结果分析
3.1 模型建立
运用SPSS 软件建立数据库,并以此为基础导入AMOS 软件中进行分析。根据理论模型,以主观规范、知觉行为控制、顾客抱怨、感知质量为自变量,以主观态度、感知价值为中介变量,以合乘意向为因变量,建立结构方程模型,如图1所示。
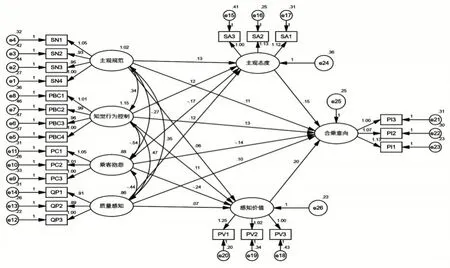
图1 结构方程标准化路径估计
图中估计参数有14 个标准化路径系数值、23 个观测变量的标准化因子载荷值以及26 个观测误差方差。通过对一些拟合指标的测算衡量结构方程模型是否成立。由结果可知,各项指标均达标。说明模型的拟合程度较好,模型可以接受。
3.2 路径分析
由表3可知,模型的拟合指标均达到标准要求,故对模型的路径进行分析。其中,主观规范到感知价值的标准化路径系数较小,临界比值为1.816 小于标准值1.960,显著性P 值为0.069 大于0.05,显著性检验未通过,表明路径不显著,故假设因果关系不成立;感知质量到感知价值的标准化路径系数较小,临界比值为1.747 小于标准值1.960,显著性P 值为0.081 大于0.05,说明感知质量对感知价值没有显著的正向影响作用,故假设不成立。
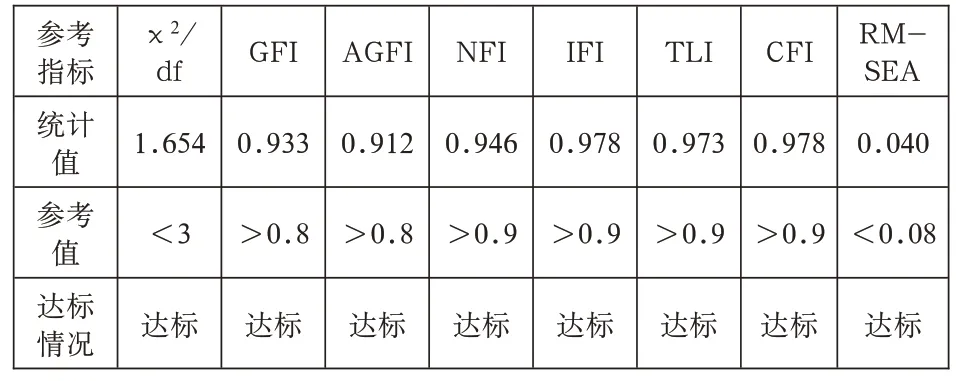
表3 结构方程模型拟合指标
3.3 中介效应检验
根据路径分析的结果,假设检验是成立的,为探究这些显著的路径里是否具有中介效应,在AMOS21.0 运行Bootstrap 法直接检验中介效应的存在性。直接检验的假设条件为H0∶ab=0。如果检验结果得出的置信区间包含0,表示不存在中介效应。重复5000 次,置信区间标准为95%,采用偏差校正法进行检验。采用AMOS 软件自带的语法将相关路径全部赋值,分别计算非标准化和标准化的特定中介效应。中介效应检验见表4。

表4 中介效应检验
结果可知,有8 条中介路径,其中主观规范-感知价值-合乘意向和感知质量-感知价值-合乘意向的中介路径上下区间均包含0,P 值大于显著水平0.05,故假设不成立,中介效应不成立。其他中介路径上下区间均不包含0,P 值小于显著水平0.05,故假设成立,中介效应成立。
3.4 模型解释
结合上述试验,分析如下:
其一,知觉行为控制是直接影响单位小汽车通勤合乘意向的最主要因素。知觉行为控制与合乘意向的标准化路径系数越大,影响关系越强,相关性越高,具有正向的显著影响。其二,顾客抱怨对合乘意向具有负向影响。其标准化路径系数为-0.181(t=-2.839,p=0.000<0.01),P 值小于0.05(假设成立),在t 的绝对值大于1.96 的情况下,负向影响关系显著。
4 结论
提出一种能够同时满足合乘者和司机需求的、长期稳定的合乘关系模式——单位小汽车通勤合乘。结果发现,知觉行为控制是直接影响单位小汽车通勤合乘意向的最主要因素,当出现恶劣天气、车辆供给不足、相关政策服务完善时,单位小汽车通勤合乘会对通勤者产生一定的吸引力。
顾客抱怨通过感知价值对合乘意向的负向影响最大。首先,管理者应重视与政府、企业的合作,宣传合乘具有节省出行费用、节约社会公共资源、减少环境污染等优点;其次,通过算法优化合乘路径,较少绕行距离,提高准时性、高效性;最后,还可以设定评价管理系统,针对司机服务、车内整洁度,方便后续合乘者参考。
