基于换能器阵的三维多粒子悬浮及操控装置
2022-02-24徐钰琪许辉杰郭瑞雪方明月郑键彬谢翠婷
徐钰琪,许辉杰,郭瑞雪,方明月,郑键彬,谢翠婷
(华南师范大学 物理与电信工程学院,广东 广州 510006)
超声驻波悬浮传输技术可实现对微量液体材料或微小器件的非接触操作,加强其在生物技术[1,2]、分析化学[3]和材料加工[4,5]等许多领域的应用潜力. 目前,国内外对超声驻波悬浮传输装置的研制已经取得了很多的研究成果.
单轴声悬浮器由一个发射端和一个反射端构成,已被广泛用于轴上悬浮轻质小物体[6]. 一些单轴悬浮器甚至可以悬浮高密度材料,如铱和汞[7,8]. 通过改变声场中势阱的位置可以实现对物体的传输控制,目前的控制方法主要包括:频率控制法、相位控制法、谐振腔长度控制法、振幅控制法等[9]. 各种控制方法没有统一的评价标准,相位控制法逐渐成为超声驻波悬浮传输控制技术的主要发展趋势,利用相位控制法、通过不同的系统可以实现对物体的二维操纵[10,11]. 但是上述提及的方法只能使物体在一个轴或平面上悬浮和移动,这在一定程度上限制了超声波悬浮操作的进一步应用.
近年来,三维操作技术引起了广泛的关注. 有研究学者模拟了不同条件下的三维声场,并由此设计了许多器件. Ochiai等人搭建了由两个或者四个换能器阵列组成的装置,每个换能器阵有数百个超声波传感器分开控制,分别设置适当的相位差,可以产生多个焦点[12,13]. 尽管这个实验进行了三维操作,但物体仅能在单个平面的这些点上悬浮. 由于声波被聚焦,势阱的数量减少,只有少数粒子可被悬浮. Omirou等人设计了两相控阵列悬浮系统[14],通过控制传感器的振幅和相位来实现物体的三维运动,但悬浮粒子的数量仍然相对较少.
针对目前三维声操作技术悬浮粒子数量少、悬浮空间局限的问题,本文设计了包含三对相对超声换能器阵列的装置,通过改变两个相对换能器阵的相位差实现粒子在x、y和z方向的移动,提出了一种在三维空间同时控制大量粒子的技术建议. 该技术对需要观察和比较许多小物体(例如细胞和生物材料)的情况具有一定的适用性. 此外,该装置可以应用于测量声速,具有一定的创新性.
1 实验原理[15]
根据Gor′ kov[16]关于声悬浮的理论,作用于半径为R的小球上的声辐射时间平均势为
(1)
因此,施加在小球的声辐射力可以通过Gor′ kov势Urad的梯度确定为
(2)
粒子将被聚集在局部极小值处,称为声势阱.
为了实现对粒子的三维操控,本文考虑使用由3对相反的平面波叠加而成的3个正交驻波. 对于每一对平面波,一个平面波的相位是可调的,而另一个是恒定的. 因此,3个正交的驻波可以表示为
(3)
(4)
(5)
其中,Øx、Øy、Øz分别是x、y、z方向两个相对的平面波之间的相位差. 3个正交驻波的声压叠加值为
p(x,y,z)=px+py+pz
(6)

2 装置设计
基于换能器阵的三维多粒子悬浮及操控装置系统主要由三维超声波换能器阵列、单片机控制模块、驱动放大模块、电源供电模块和数据采集模块组成(图1、图2).
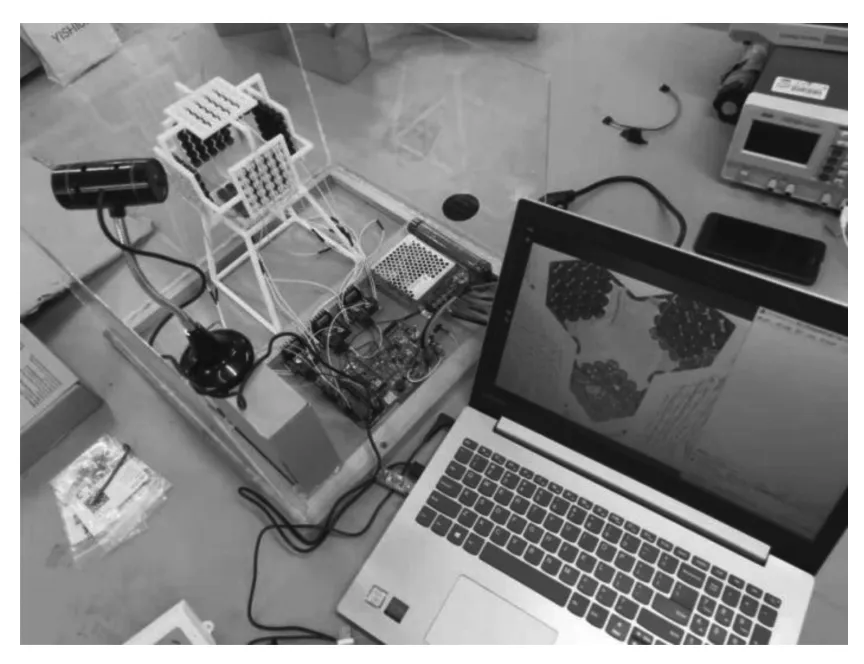
图1 实验系统

图2 实验系统总框图
三维超声波换能器阵列,根据上述悬浮原理,设计该模块由3对相对的换能器阵列组成,它们产生3个正交的驻波,能够将物体悬浮在空中,如图3所示. 相对的换能器阵列分别沿x、y和z方向固定,两个相对的阵列之间的距离为10 cm. 每个换能器阵列都有5×5个换能器,固定在网格结构的背板上,两个相邻换能器的中心距离为12 mm. 所使用的传感器(HY-1040ABS-T)的直径为10 mm,高度为7 mm. 与相控阵聚焦不同,每个阵列上的换能器是并联连接的,因此每个换能器发出的声波的相位是相同的,即阵列发出的声波是近似的平面波. 应该注意的是,篮板对声波的反射会干扰并削弱声压,从而大大影响操纵的稳定性. 因此,本文设计了网格结构的背板,以允许声波通过并大大减少反射. 另外,该设备固定在支架上,以避免桌子反射.
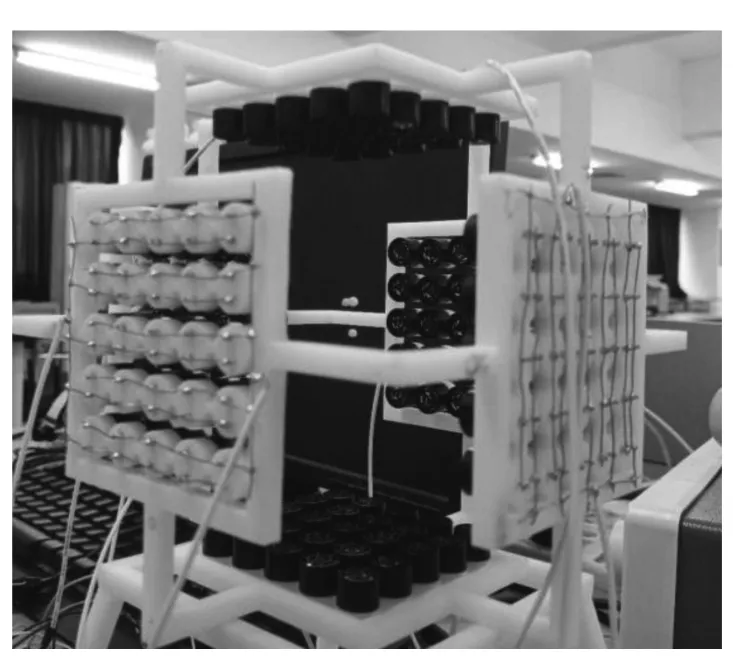
图3 三维超声波换能器阵列实物图
单片机控制模块,由声悬浮操纵原理可知,可以通过改变信号的相位、频率及幅度来改变声学参数,从而实现对粒子的操纵. 而RT1064开发板中的MCU有多个PWM外部输出端口,可以直接调用开发板源程序资料中的PWM函数,直接修改输出PWM波的频率,修改输出延时来改变相位,本实验设置每100 ms改变一次相位. 单片机的供电则由电池转5 V稳压输出供电.
驱动放大模块采用3路L298N驱动器对单片机输出的控制信号进行过滤放大,L298N驱动器工作电压可达到36 V/4 A. 由于每两面阵列的各个换能器大部分是并联关系,由功率叠加原理可知,换能器阵列需要更大的驱动电压或电流,于是采用此模块进行功率放大. 3对面与面阵列由3路L298N驱动器进行驱动,方便对不同参数的调整.
由于驱动模块对单片机的控制信号进行放大需要一定的工作电压,电压需要提供稳压输出给功率放大模块. 考虑到大多数的稳压输出模块是升压稳定输出,一般来说功率不足,于是使用降压的开关电源. 实验测试时,发现市面上常见的24 V稳压输出具有较好的驱动效果,小球能稳定悬浮,于是本文采用了220 V转24 V的开关电源对装置进行供电.
考虑到人眼观测和刻度尺测量的误差和局限,本文利用高速摄像机对粒子进行拍摄,记录下每个粒子的运动情况,方便后续进行数据处理.
对于实验,首先用设备展示了使用膨胀聚苯乙烯小球的悬浮效果,如图4所示. 从图4中可以看出,大量的颗粒悬浮在空气中. 由于势阱的尺寸大于小球的直径,小球之间不可避免地存在静电力,因此,一些小球可能会聚集在一起. 接下来,通过调整两个相对的换能器阵列之间的相位差来操纵小球的运动. 例如,图5显示了随着相位差的变化,小球的实际位置的时间序列. 显然,随着相位差的变化,小球沿着相应的方向移动. 实验发现,调整x、y、z方向信号的相位差,都可以让小球沿着相应的方向移动,表明该实验可以实现可控.
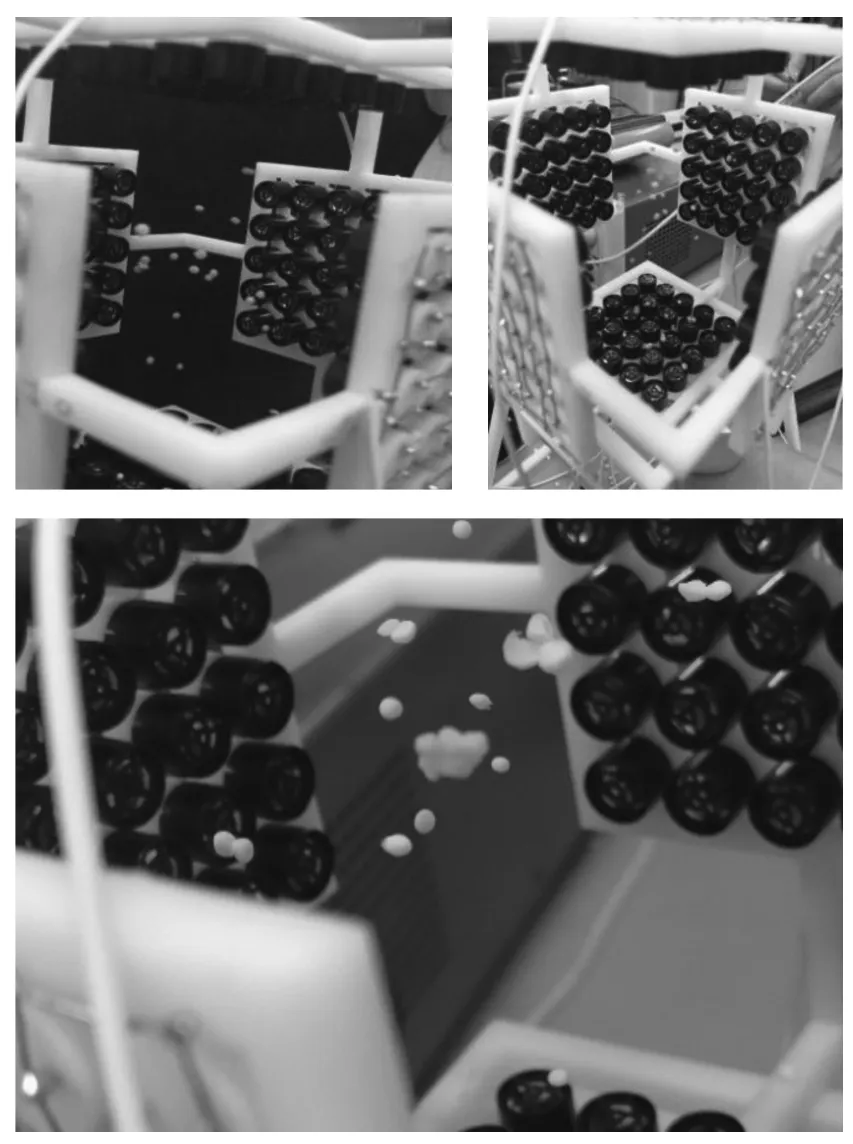
图4 多粒子悬浮效果图

图5 小球在y方向上的传输轨迹图
3 装置应用举例:驻波共振法测量声速[17,18]
依据声悬浮的原理,物体将悬浮于声压波节处,驻波声场中相邻波节或波腹位置之间的距离为该超声波的半波长. 当声波谐振腔的长度恰好为声波半波长的整数倍时,产生谐振,小球悬浮,悬浮时有
(9)
由
v=λf
(10)
得
(11)
其中,f为辐射端超声波频率,L为谐振腔间的间距.

如表1所示,通过计算所得声速v=333.56 m/s,与文献中理论声速误差为1.89%;在Matlab对像素坐标取点的过程中发现,由于小球有一定的大小以及参考点有一定的尺寸,导致每次对像素点进行定位的像素坐标都会有所不同(图6). 又因为实际距离与像素点坐标本身就有较大的缩放比例,且两个小球之间的实际间距Δd,亦即波长的数量级与声速数量级相差较大,导致像素坐标取值稍微有所不同,就会使计算所得的声速与理论值有较大差距.
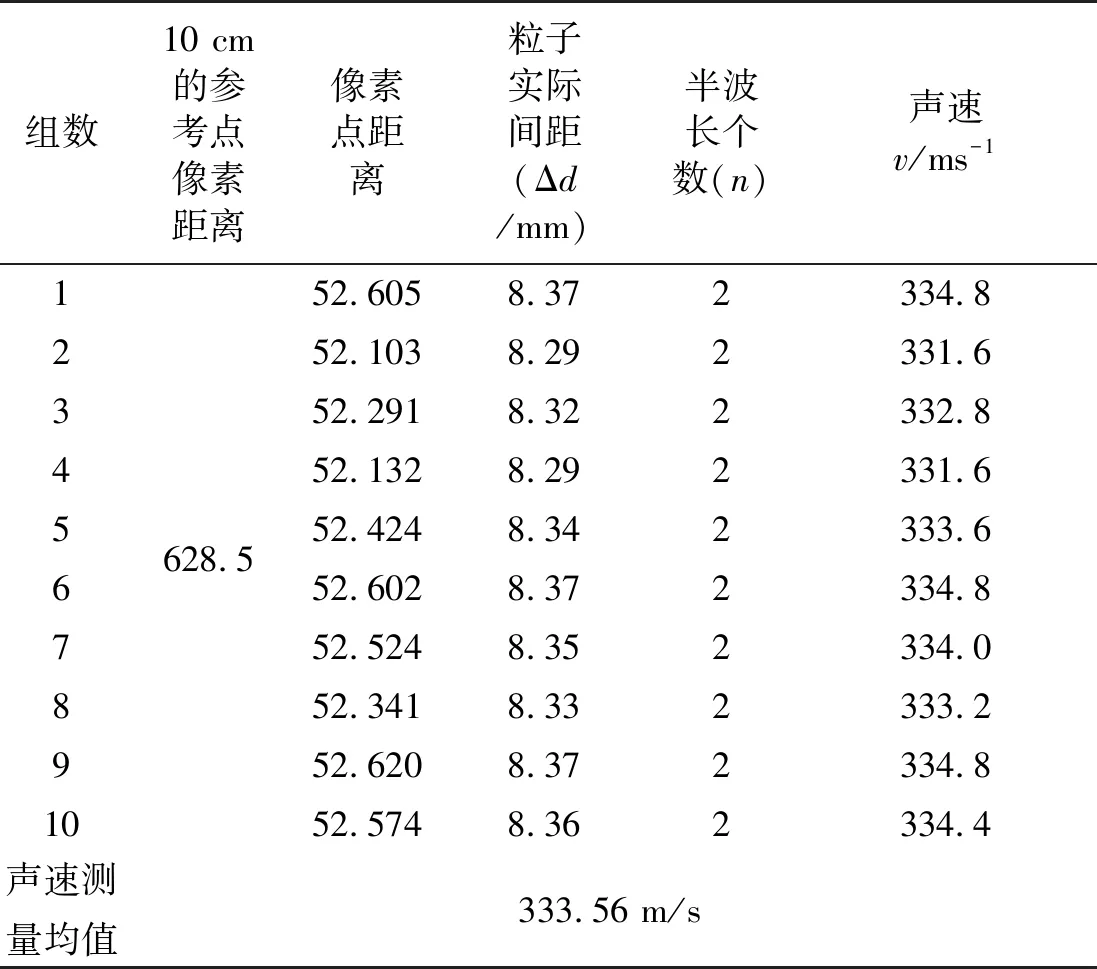
表1 测量数据及结果

图6 部分像素坐标提取结果图
另外,在实际操作过程中,可能由于相机摆放角度与粒子所在平面不够平行、参照点选取不合适、Matlab计算像素点间距时选取的像素点有偏差等导致声速的测量与理论值偏差较大.
用该方法测量声速必须在十分严格的环境与条件下进行,且测量结果相对误差一般较大,本小组经过多次试验,相对误差一般在2%~5%左右.
4 总结
本文设计了一种由3对相对的换能器阵列组成的超声波悬浮器,用于悬浮和操纵空中的许多小颗粒. 通过改变换能器阵列的相位差,可以在三维方向上控制粒子的移动. 利用该装置可以测量声速,但必须在十分严格的环境与条件下进行测量,且测量结果相对误差一般较大,相对误差在2%~5%左右. 该装置提供了处理大量颗粒的技术方案,这在生物技术、分析化学和材料加工等领域创造了应用声学处理技术的更多可能性.