一种用于机器视觉系统的双远心镜头设计
2022-02-23曹一青
曹一青
一种用于机器视觉系统的双远心镜头设计
曹一青1,2
(1. 莆田学院 机电与信息工程学院,福建 莆田 351100;2. 福建省激光精密加工工程技术研究中心,福建 莆田 351100)
为了满足目前机器视觉工业在线检测提出的更高要求,本文给出了一种用于机器视觉系统的双远心镜头设计思路。首先,根据系统设计指标,确定较合适初始结构;然后,在双远心镜头成像原理和像差分析方法基础上,应用光学设计软件Zemax对系统像差反复优化设计,最终得到了一款具有高分辨率、低畸变及远心度小等特点的双远心镜头。该镜头系统由10片折射透镜组成,工作波长为400~700nm,工作物距为100mm,畸变小于0.07%,远心度最大不超过为0.06°,调制传递函数值在奈奎斯特频率77lp/mm处均大于0.5,像差校正较好,满足系统设计要求。
光学设计;双远心镜头;远心度;畸变;像差校正
0 引言
近年来,机器视觉技术出现为电子、汽车、精密机械等行业产品表面缺陷的在线检测提供了一种优选技术,用该技术来取代“人眼”进行工业产品表面缺陷和几何尺寸在线检测,已经成为智能仪器设计需要考虑重要部分,并且伴随着电子和计算机等技术不断发展,使得机器视觉系统在这些领域应用越来越广泛[1-3]。机器视觉系统主要分为成像系统和图像处理系统两部分,成像系统镜头成像质量直接决定其工作性能。由于它特殊应用领域使得对镜头系统的分辨率、畸变等光学性能要求越来越高,而传统工业镜头难以满足该要求;远心镜头系统具有大景深、低畸变和高分辨率等独特性能,它在一定程度上解决了机器视觉系统应用传统工业镜头带来视差和畸变引起测量精度问题[4]。
远心镜头系统按照光阑放置位置不同一般分为物方远心、像方远心和双远心3种情况,双远心镜头结合了物方远心镜头和像方远心镜头两者特点,实现在一定物距范围内,得到图像放大倍率不会随物距变化而变化,可以更精准保证测量数据精确度,使得该类镜头被广泛应用于机器视觉精密测量领域。目前,许多研究人员对远心镜头系统设计进行了探索,上海帆声图像科技有限公司的景磊设计了一款用于机器视觉触摸屏在线检测的F数为12的大倍率物方远心镜头[5];长春理工大学的罗春华等人设计了一款F数为8的工业双远心系统[6];桂林电子科技大学的李明东等人在系统中引入3个非球面面型设计了一种高分辨率双远心物镜[7];西安工业大学的陈智利等人以反远距系统为初始结构,优化得到了一款F数为8的大视场双远心工业镜头[8]。然而,虽然远心镜头发展时间较长,但是随着人们对机器视觉精密测量仪器性能要求越来越高,使得对仪器中双远心镜头系统各项指标也随之提高,这将大大提升系统设计难度,使得如何更有效地设计出更高性能的此类系统是目前必须要解决的问题。
综上所述,结合目前对双远心镜头性要求越来越高,本文是基于此类系统的设计原理和像差分析方法,讨论了一种双远心镜头系统设计思路。首先,根据系统设计指标,确定较为合适初始结构,并应用Zemax软件构建系统优化评价函数来控制系统像差及远心度等设计指标,最终设计一款工作波长为400~700nm,F数为3.3,工作物距为100mm的高分辨率、低畸变及远心度的全球面双远心镜头系统,本文所述方法将为以后设计此类系统提供一种有效的参考方法。
1 远心光学系统原理
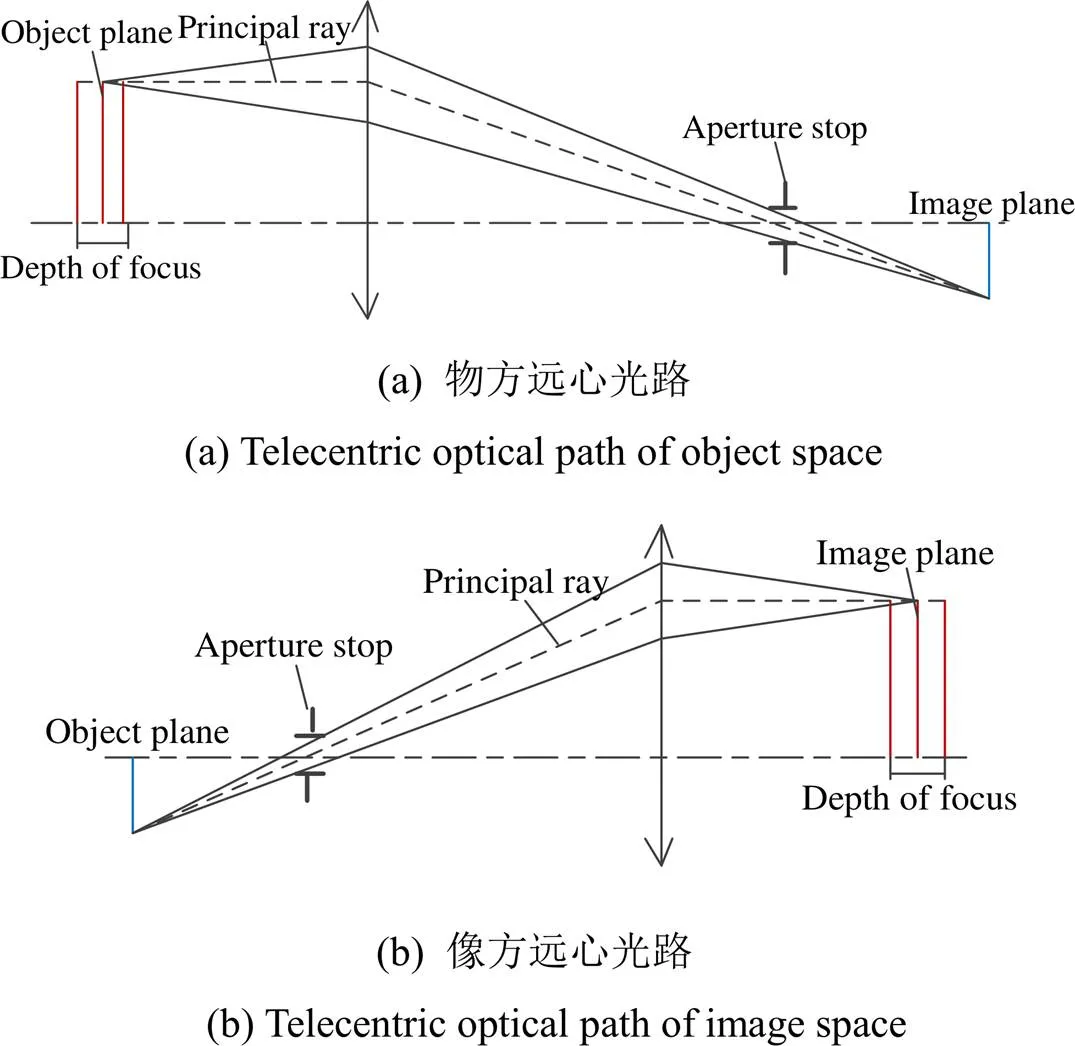
机器视觉领域中,远心光学系统使用能避免传统光学系统带来视差和畸变。远心光路分为物方远心光路、像方远心光路和双远心光路3种,它们对应光路图如图1(a)、图1(b)和图1(c)所示[9]。物方和像方远心光路分别是将孔径光阑设置在系统像方焦平面和物方焦平面上,能够分别消除物方和像方调焦不准确带来的测量误差;另外,物方远心光路在一定范围内,图像放大倍数不会因物距变化而变化,而像方远心光路中像平面位置的变化不会影响系统成像大小。但是,双远心光路是结合了物方远心和像方远心光路两者优点,这就避免了这两种方法带来的测量误差,更好地保证测量数据精确性,因此该类光路系统被广泛应用于机器视觉测量领域中。
对于双远心光路系统设计目前主要有3种方法:第一,先设计一个成像质量好的像方远心系统,在该基础上进行结构对称变换,得到物方远心系统,然后将物方和像方两个远心系统组合成双远心系统;第二,对物方和像方远心系统分别设计,将这两个远心系统合并形成双远心系统;第三,将双高斯结构或反远距等光阑位于系统中间的普通成像系统作为初始结构,对其进行优化设计后,前半部分和后半部分系统分别形成物方和像方远心系统,这样系统就变成双远心系统。经过对上述方法进行分析,本文采用第3种方法设计双远心镜头系统。
2 远心光学系统设计方法
2.1 设计要求及初始结构确定
本文在设计用于机器视觉测量的双远心镜头光学系统时,选用Sony公司生产的型号为ICX285的CMOS传感器,板面尺寸为2/3英寸,分辨率为1360×1024,单个像素尺寸为6.45mm×6.45mm;系统在物方和像方分别可观测半视场分别为14mm和5.56mm,则放大率为:
式中:和¢分别表示物方和像方视场大小。应用表达式(1),系统放大率为-0.397。
根据奈奎斯特采样定理,物点经光学系统后必须覆盖至少两个CMOS传感器像元才能被辨别[8],因此应用表达式(2)能计算得到该光学系统的检测精度为32.49mm。
式中:为检测精度;¢为CMOS传感器单个像素尺寸。
因此,设计的双远心镜头光学系统主要技术指标由表1给出。
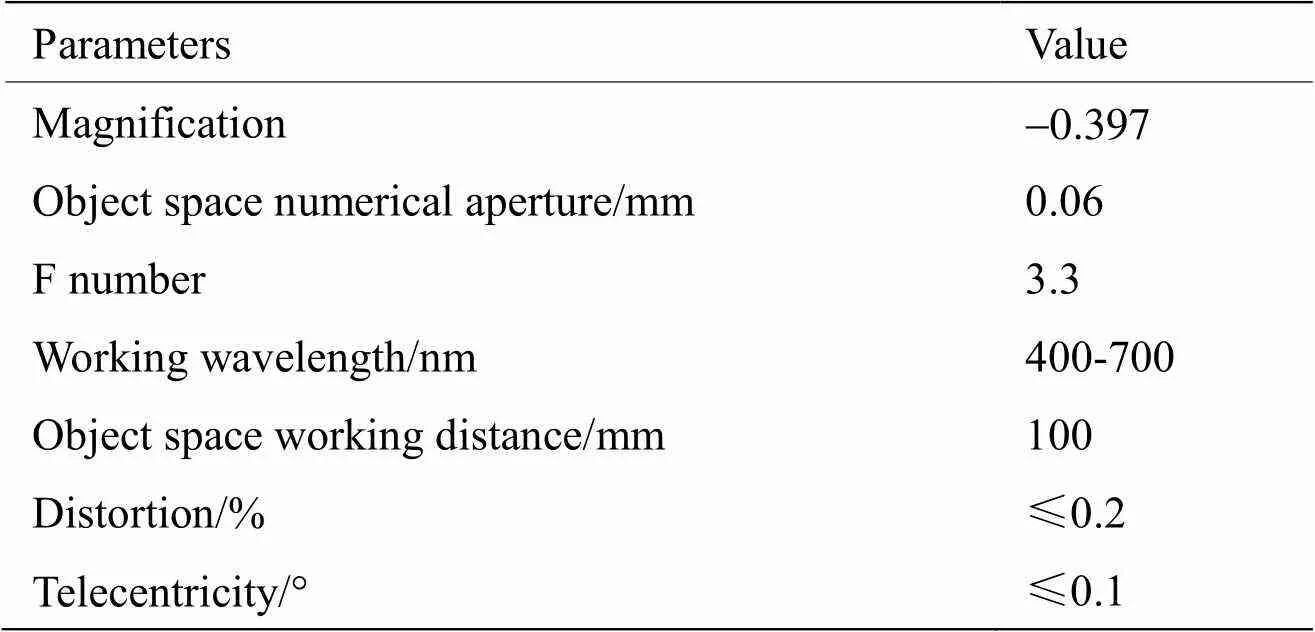
表1 双远心镜头光学系统主要技术指标
选取合适初始结构是光学系统设计过程重要环节,目前系统初始结构确定方法一般有两种:第一种是根据系统相关设计指标,利用赛德尔像差理论建立像差平衡方程[9-10],或者采用PW法直接设计系统初始结构,该解析方法对于简单系统结构具有较强优势,然而对于复杂光学系统而言,该方法计算复杂冗余,工作量非常大,难以完成高效高质系统设计;第二种结合专利库或已有参考文献中的专利结构,确定用于后续设计满足系统指标的初始结构。综合上述两种初始结构分析方法,本文在设计双远心镜头光学系统时采用第2种方法来确定系统初始结构。结合上一节论述双远心镜头系统设计方法,在本设计中选取光阑位于系统中间的普通成像系统作为系统初始结构;另外,由于对称结构对垂轴像差校正有很大优势,以及双远心镜头光学系统对分辨率有较高要求需要更大设计自由度来进一步优化像差,因此将两个双高斯镜头系统组合而成的光学系统结构作为设计双远心镜头系统的初始结构。
2.2 优化设计过程及结果分析
系统初始结构确定后,最终得到成像性能好的系统,需要经过后续反复像差校正过程,同时也需要对其结构进一步优化,具体优化设计过程为[11-13]:
①根据表1给出设计指标,在上面确定初始结构系统中设定物方数值孔径、物方视场大小和工作波长等参数,将光学面曲率半径、空气间隔、透镜厚度和材料均设定为优化变量,利用Zemax软件优化模块中操作数APER和TTHI控制数值孔径大小为0.06mm和物方工作距离为100mm,应用操作数PMAG控制镜头系统放大倍率;加入相对应的像差操作数对系统像差进行优化[14-15];
②对于双远心镜头光学系统,除了上述几种像差需要控制外,还需要着重优化系统畸变和远心度大小,设计过程中应用操作数DIMX控制系统畸变,并开启软件中物方远心功能达到保证系统物方为绝对远心,对于像方远心度通过控制系统最后光学面出射主光线方向余弦的方法来实现,应用操作数REAC来计算和优化0视场、0.3视场、0.5视场、0.7视场和全视场5个视场位置时最后光学面出射主光线方向余弦值尽可能接近1,从而使系统出射光束垂直入射到像面上,这样就能达到镜头系统同时满足物方和像方主光线与光轴夹角为0,实现镜头双远心目的;
③由于远心系统孔径光阑通常都较小,但该系统初始结构数量较多达到12片,容易造成光通量降低,且增加了系统成本和装配难度;因此,为了能提高光通量,并合理保证设计自由度来有效校正像差,以及应用胶合透镜来校正高级像差,通过对结构重新合理设计优化,将系统镜片数减少到10片,且包含一组双胶合和三胶合透镜。
通过上述优化方法,在确保系统物方和像方远心度和畸变等要求下,采用锤形优化方式来优化系统镜片材料,补偿系统色差,观察每次优化后系统各类像差变化情况,增加对系统成像性能贡献较大像差项操作数的权重系数,对其有针对性优化,最终达到满足系统设计各项指标的光学系统,系统结构光学参数和光路图分别由图2和表2给出。

图2 优化后双远心镜头系统的结构图和光路图
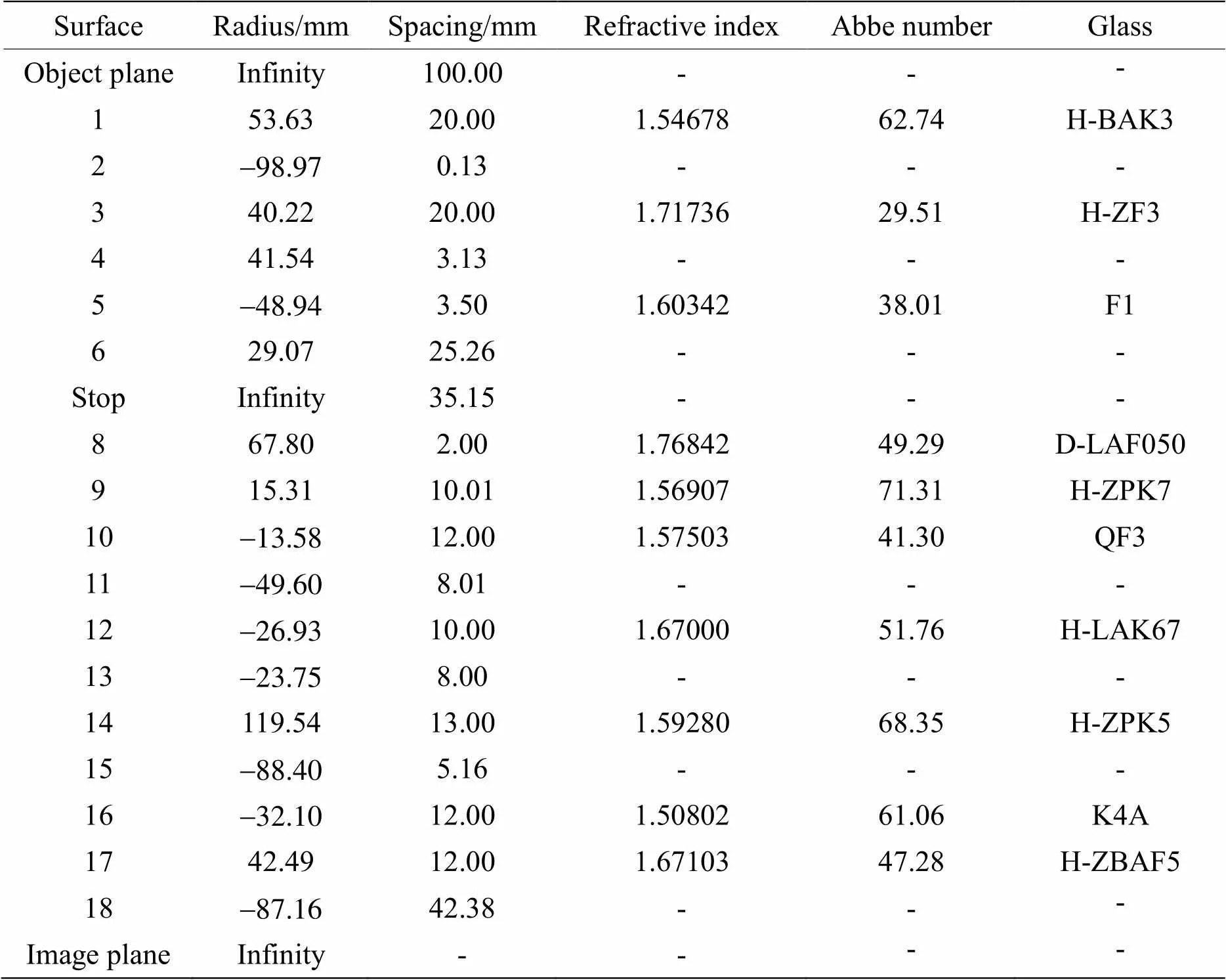
表2 优化后双远心镜头系统的光学参数
上述优化得到双远心镜头系统对应的调制传递函数(modulation transfer function,MTF)曲线、点列图和场曲畸变曲线图分别如图3、图4和图5所示,从图中可以看出系统在奈奎斯特频率1000/(2×6.45)≈77lp/mm处都大于0.50;并且MTF曲线平直,成像质量较好;另外,系统的半视场(物高)为0mm、9mm和14mm对应的点列图均方根(root mean square,RMS)半径为2.674mm、3.032mm和5.243mm,整体上看均方根半径都比较小,因此优化设计后的系统成像性能良好,满足设计要求。从图5给出的整个场曲畸变曲线可以得到,该双远心镜头系统场曲校正在0.12mm以内,畸变小于0.07%,满足系统设计对场曲和畸变要求。
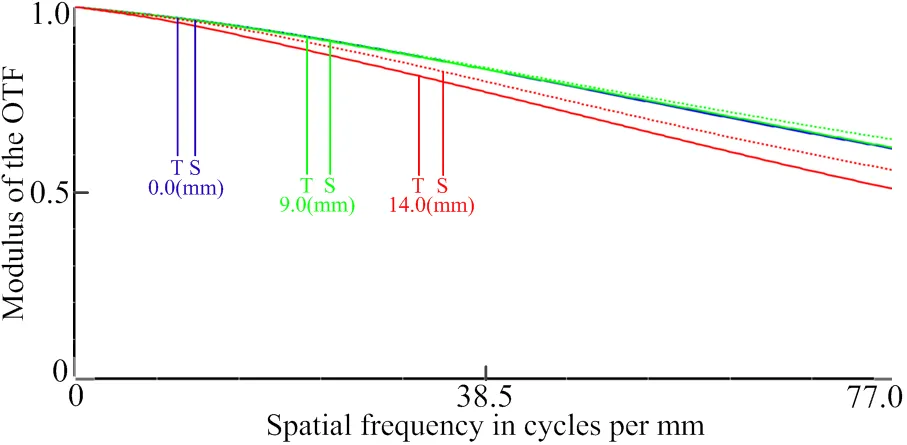
图3 优化后双远心镜头系统的调制传递函数(MTF)曲线图
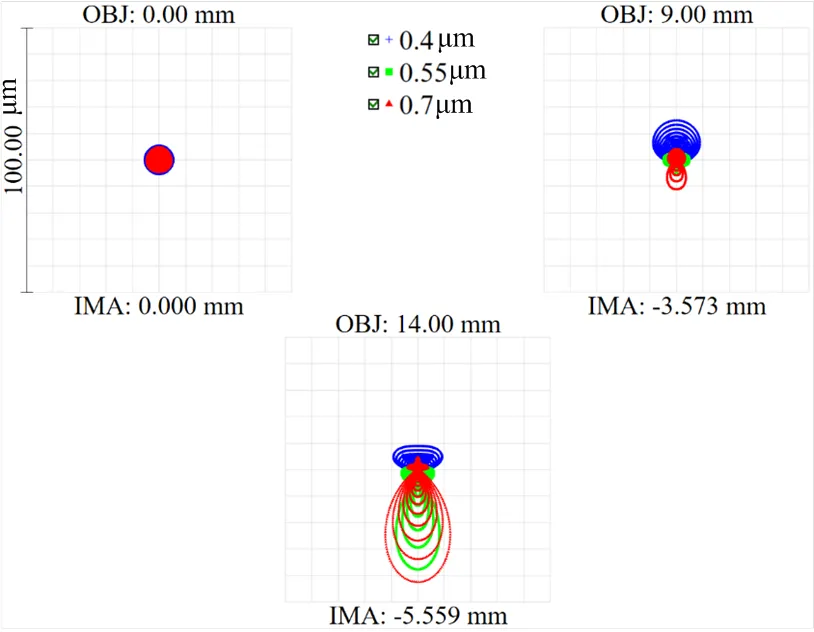
图4 优化后双远心镜头系统的点列图
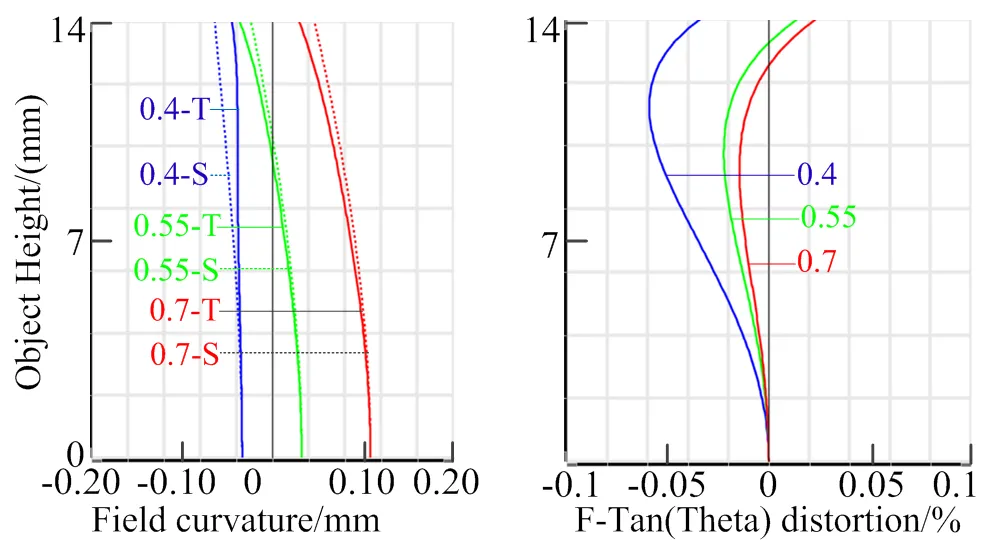
图5 优化后双远心镜头系统的场曲及畸变曲线
远心度是评价双远心镜头系统的重要指标之一,本文是基于物方绝对远心来设计完成,并通过评价函数编辑器的REAC操作数来查看系统视场范围内多个视场对应的像方远心度,其对应像方远心度大小如表3所示,它分别列出了0.1、0.3、0.5、0.7和1(代表归一化物方高度)对应的远心度大小。从表3中可以看出系统最大远心度小于0.06°,小于设计指标0.1°,它能保证该镜头系统在不同焦深工作环境下有比较好的图像清晰度和小的图像变形。

表3 双远心镜头光学系统远心度
3 结论
根据工业生产中机器视觉检测系统对光学系统参数和成像性能实际需要,设计了一款双远心物镜光学系统。该系统由10片透镜组成,光学面均采用全球面设计,F数为3.3,最大畸变小于0.07%,全视场范围内远心度均小于0.06°,各种像差都得到了较好校正和平衡,具有较好的成像性能;它具有低畸变、低远心度和像质优良等特点,满足远心系统各项设计指标要求,具有较强的实用性。本文讨论的方法在以后设计类似光学系统具有一定的参考价值。
[1] 田原嫄, 黄合成, 谭庆昌. 基于机器视觉的零件尺寸测量[J]. 激光与光电子学进展, 2010, 47(1): 011501.
TIAN Y Y, HUANG H C, TAN Q C. Size measurement of parts based on machine vision[J]., 2010, 47(1): 011501.
[2] 张恒, 何文雪. 基于机器视觉的坚果尺寸检测系统设计[J]. 工业仪表与自动化装置, 2020(6): 52-60.
ZHANG H, HE W X. Design of nut size detection system based on machine vision[J]., 2020(6): 52-60.
[3] 付晓云. 基于机器视觉的典型零件几何尺寸检测系统的设计[J]. 仪表技术, 2021(2): 32-35.
FU X Y. Design of Geometric dimension detection system for typical parts based on machine vision [J]., 2021(2): 32-35.
[4] 朱铮涛, 裴炜冬, 李渊, 等. 基于远心镜头的激光三角测距系统研究与实现[J]. 激光与光电子学进展, 2018, 55(3): 031002.
ZHU Z T, PEI W D, LI Y, et al. Research and implementation of laser triangulation system based on telecentric lens[J]., 2018, 55(3): 031002.
[5] 景磊. 大倍率高分辨率机器视觉远心镜头设计[J]. 现代信息科技, 2019, 3(12): 141-144.
JING L. Design of telecentric lens for high power and high resolution machine vision[J]., 2019, 3(12): 141-144.
[6] 罗春华, 侯锐利, 于艇, 等. 工业双远心系统的设计[J]. 长春理工大学学报: 自然科学版, 2015, 38(6): 12-15.
LUO C H, HOU R L, YU T, et al. The design of double telecentric optical system in industry[J].: Natural Science Edition, 2015, 38(6): 12-15.
[7] 李明东, 高兴宇, 叶鹏, 等. 机器视觉非球面双远心物镜的设计[J]. 激光与光电子学进展, 2016, 53(7): 134-142.
LI M D, GAO X Y, YE P, et al. Design of aspherical double telecentric lens for machine vision[J]., 2016, 53(7): 134-142.
[8] 陈智利, 刘雨昭, 费芒芒, 等. 大视场双远心工业镜头光学系统设计[J]. 西安工业大学学报, 2018, 38(5): 444-450.
CHEN Z L, LIU Y Z, FEI M M, et al. Design of industrial double telecentric optical lens with large field of view[J]., 2018, 38(5): 444-450.
[9] 叶文炜, 周天福, 黄锦媛, 等. 基于机器视觉的双视野双远心光学系统设计[J]. 激光与光电子学进展, 2020, 57(1): 012202.
YE W W, ZHOU T F, HUANG J X, et al. Design of dual-vision double telecentric optical system based on machine vision[J]., 2020, 57(1): 012202.
[10] 王之江, 顾培森. 实用光学技术手册[M]. 北京: 机械工业出版社, 2007.
WANG Z J, GU P S.[M]. Beijing: Machinery Industry Press, 2007.
[11] 杨康. 基于机器视觉的工业镜头设计[D]. 福州: 福建师范大学, 2013.
YANG K. Design of Several Industrial Camera Based on Machine Vision[D]. Fuzhou: Fujian Normal Univesity, 2013.
[12] 沈志娟, 林海峰, 曹一青. 多组元全动型大孔径及超大视场变焦系统设计[J]. 激光与光电子学进展, 2021, 58(7): 0708001.
SHEN Z J, LIN H F, CAO Y Q. Design of zoom lens system with moveable components including large aperture and with ultra-wide field of view [J]., 2021, 58(7): 0708001.
[13] 曹桂丽, 刘芳芳, 贾永丹, 等. 大相对孔径、长焦距的紫外告警光学系统设计[J]. 激光与光电子学进展, 2019, 56(12): 122203.
CAO G L, LIU F F, JIA Y D, et al. Design of ultraviolet warning optical system with large relative aperture and long focal length [J]., 2019, 56(12): 122203.
[14] 高志山. ZEMAX软件在像差设计中的应用[M]. 南京: 南京理工大学出版社, 2006.
GAO Z S.[M]. Nanjing: Nanjing University of Science and Technology Press, 2006.
[15] 王之江, 顾培森. 实用光学技术手册[M]. 北京: 机械工业出版社, 2007.
WANG Z J, GU P S.[M]. Beijing: Machinery Industry Press, 2007.
Design of Double Telecentric Lens Using Machine Vision System
CAO Yiqing1,2
(1.,,,351100,;2.,351100,)
This study presents a design idea for adouble telecentric lens for machine vision systems to meet the industry requirements for the on-line inspection of machine vision. First, according to the design index of the system, a suitable initial structure is determined, and based on the imaging principle and aberration analysis method of the double telecentric lens, the aberration of the lens is then optimized repeatedly using the optical design software Zemax. Finally, a double telecentric lens with high resolution, low distortion, and small telecentricity is obtained. The lens system consists of 10 refraction lenses with an operating wavelength range 400–700 nm, a working object distance of 100 mm, distortion of less than 0.07%, maximum telecentricity of 0.06°, and modulation transfer function value greater than 0.5 at a Nyquist frequency of 77 lp/mm. The aberration correction is good and meets the design requirements of the system.
optical design; double telecentric lens; telecentricity; distortion; aberration correction
O435.2
A
1001-8891(2022)02-0140-05
2021-11-08;
2021-11-11.
曹一青(1987-),男,博士研究生,讲师,硕士生导师,主要从事光学系统成像分析及设计、光学检测技术等方面的研究。E-mail:caoyiqing1987@163.com
福建省自然科学基金项目(2020J01916);福建省中青年教师教育科研项目(JAT190590,JAT190567);莆田市科技计划项目(2020GP004);莆田学院引进人才科研启动费项目(2019010)。
