角闪烁噪声下的集中式MIMO雷达自适应资源分配算法
2022-02-23李正杰谢军伟张浩为陈文钰
李正杰, 谢军伟, 张浩为, 邵 雷, 陈文钰
(空军工程大学防空反导学院, 陕西 西安 710051)
0 引 言
集中式多输入多输出(multi-input and multi-output, MIMO)雷达具备良好的波形分集增益,可有效针对弱小目标进行探测跟踪。近年来,结合认知雷达技术在接收端和发射端之间建立闭环反馈回路,实现发射资源自适应分配已成为MIMO雷达资源分配领域的重要课题[1-3]。雷达跟踪诸如飞机、舰艇等复杂扩展目标时,不同相位散射点间的相互影响,将导致接收回波相位发生畸变产生角闪烁[4]。角闪烁噪声是由角闪烁现象引起的固有测角噪声,同时具备拖尾特性和非高斯特性[5]。在角闪烁噪声下,由于跟踪难度的提升,雷达资源分配任务面临更大挑战。
现有关于MIMO雷达资源分配的研究中,文献[3]基于分布式MIMO雷达系统,推导了关于目标定位误差的克拉美罗下界(Cramer Rao lower bound,CRLB),并利用CRLB与发射功率的关系,设计了面向单个静止目标定位场景的功率分配方法。文献[6]将功率优化模型推广到了多个静止目标场景,并提出了一种标准化资源分配框架。文献[7]在文献[1]的基础上,提出增加带宽分配,并证明了功率和带宽联合分配能够进一步提高静止目标定位精度。文献[8]对目标跟踪误差的后验CRLB(posterior CRLB,PCRLB)进行推导,并利用其可预测性建立了中心式融合框架和去中心式融合框架下的两类目标跟踪模型。文献[9-10]在此基础上,将研究范围扩展到了动目标,并利用PCRLB构建代价函数进行功率分配。文献[11]对分布式MIMO雷达跟踪单个目标的功率和带宽联合分配问题进行了研究。文献[12-13]基于集中式MIMO雷达系统开展了面向多目标跟踪的资源分配问题研究,分别针对理想探测条件和杂波条件构建了两类功率分配机制。上述工作为MIMO雷达资源分配研究打下了坚实的基础,但是还存在一些不足:① 已有文献多关注于对发射功率进行配置,未对包含有效带宽在内的其他发射资源的优化分配问题进行深入研究;② 现有资源分配研究大多是在理想高斯噪声下进行的,而实际测量噪声往往是非高斯的;③ 现有用于指导目标跟踪资源分配的优化指标通常为PCRLB,而PCRLB未与当前时刻量测信息进行关联,不能准确地反映非理想条件下的目标跟踪性能。
对此,提出了一种针对集中式MIMO雷达在角闪烁场景下同时跟踪多批目标的自适应发射资源分配算法。算法流程可简述为:① 针对角闪烁噪声特点,结合平方根容积卡尔曼滤波(square-root cubature Kalman filter, SRCKF)算法和粒子滤波(particle filter, PF)的优势,设计了适用于角闪烁场景的滤波算法对目标状态进行估计[14];② 根据目标状态估计信息,对下一时刻的条件克拉美罗下界(predicted conditional CRLB, PC-CRLB)进行预测,并构建起关于功率和带宽的非凸优化模型;③ 运用凸松弛和循环最小化方法[15]将原非凸优化问题转换为一系列凸优化问题,再结合SDP算法[16]和Frank-Wolfe可行方向法[17]进行求解,最后将求解结果反馈到雷达发射机,从而构建起自适应资源分配机制。
1 系统建模
1.1 雷达工作机制
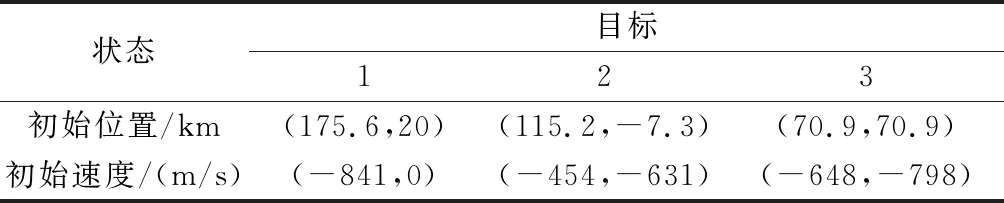
假设在二维平面内,一部收发共置的MIMO雷达部署于点(x0,y0)。雷达由M个发射阵元、N个接收阵元组成,采用均匀线阵布置方式,执行对Q(Q 令雷达在多波束机制下工作,在发射端同时发射多个相互正交的宽波束,在接收端采用数字波束形成技术(digital beam forming, DBF)合成多个独立的窄波束从而实现同时跟踪多批目标。 假设k时刻雷达向目标q发射的信号为 (1) 经接收机匹配滤波后得到k时刻关于目标q的回波信号为 (2) 假设在二维平面内,存在Q个运动规律均满足常速(constant velocity, CV)模型的运动目标。则k时刻的目标状态转移方程为 (3) (4) (5) 式中:Δt是采样间隔;sq代表过程噪声强度,用以衡量目标速度波动大小。 假设k时刻,雷达对目标q的观测向量为 (6) (7) (8) (9) 式中:βq,k和Tq,k分别代表有效带宽和时宽;BNN为接收波束的宽度。 角闪烁噪声具有拖尾特性,将影响雷达测角精度,在出现角闪烁现象时,基于高斯噪声假设的传统滤波算法跟踪性能将急剧下降。粒子滤波(particle filter, PF)算法突破了卡尔曼滤波理论框架,不受线性化误差和高斯噪声假设约束,为解决非线性、非高斯性滤波问题提供了新思路。 针对基本粒子滤波直接从状态转移函数中获得重要性函数,可能导致出现粒子退化的问题。选取计算复杂度较低且精度较高的平方根容积卡尔曼滤波[14](square-root cubature Kalman filter, SCKF)为选取重要性函数提供参考。通过充分利用当前时刻的观测信息不断修正粒子权值,可显著提高滤波精度。此外,为抑制闪烁噪声相关建模误差带来的观测扰动和状态扰动,将SCKF算法应用于PF算法框架中,从而可充分结合两者各自优势,形成可应用于角闪烁场景的平方根容积粒子滤波(square-root cubature particle filter, SCPF)。滤波算法流程可归纳为: 步骤 3权值计算及归一化。 (10) (11) 步骤 5状态更新。根据上述计算,对目标在k时刻的状态和方差估计如下: (12) 步骤 6递归。令k=k+1,返回步骤2。 (13) (14) (15) 但由于存在数学期望符号,常常难以获得式(15)的解析解。文献[21]提出了一种可获得精确数值解的计算方法: (16) (17) 鉴于目标位置的PC-CRLB与功率和带宽均相关,而PC-CRLB又为跟踪误差提供下界,因此可通过合理分配功率和带宽资源实现减小目标跟踪误差的目的。考虑跟踪目标的整体跟踪精度,将各目标的位置的PC-CRLB求和作为代价函数,建立优化模型如下: (18) 至此,在角闪烁噪声背景下,建立起了以最小化各目标距离的PC-CRLB之和为优化准则的集中式MIMO雷达资源自适应分配模型。 显然,式(18)是一个包含两个优化变量的非凸优化问题。并且由于带宽这一二次项的存在,给求解带来了更大难度。本节利用凸松弛技术,将原非凸优化问题转化为一系列凸优化问题,再通过SDP算法进行求解。为减小引入凸松弛带来的系统误差,通过循环最小化算法控制整体求解精度。求解过程如下: 步骤 1初始化,将带宽资源均匀分配。 步骤 2固定带宽为均匀分配后,原式(18)的优化模型可描述为 (19) 由文献[12]可知,式(19)是凸优化问题,可将其转化为SDP问题并通过Frank-Wolfe可行方向法进行求解。具体转化过程如下: (20) (21) (22) (23) 步骤 3.1初始化。输入一个可行的起点x(k),设置允许误差ε>0并且令k=1; 步骤 3.2求解如下线性规划模型: s.t.x∈S 然后,得到优化解y(k); 否则进入步骤3.4; 步骤 3.4求解: minf(x(k)+λ(y(k)-x(k))) s.t. 0≤λ≤1 求得优化解λ(k); 步骤 3.5令x(k+1)=x(k)+λ(k)(y(k)-x(k),并且设置k=k+1,返回步骤3.2。 步骤 4将所求得的资源分配结果代入PC-CRLB进行计算后保存结果,再跳转至步骤2。直到前后两次的PC-CRLB之差满足终止条件ε后,得到最终的功率分配方案Pk,opt和带宽分配方案βk,opt。至此,便可求解闪烁噪声下集中式MIMO雷达的功率和带宽联合分配问题,具体方法见下节。 (24) 表1 目标运动初态 设置所有目标RCS值为1,且将角闪烁噪声强度设置为0,此时量测噪声为理想情况的高斯白噪声。 图2(a)和图2(b)展示了高斯白噪声影响场景下4种不同分配方法计算下的PC-CRLB和RMSE性能。由图2(a)和图2(b)可知,在距离影响场景下,功率和带宽联合优化分配算法性能最佳,等功率等带宽分配方式性能最差。图2(c)展示了各时刻功率和带宽的优化分配结果,不同颜色的方块代表对应时刻相应目标获取的资源比率,并将其定义为 (25) 由图2(c)可知,由于距离目标越远目标估计误差越大,系统将更多的功率和带宽分配给了距雷达较远的目标(如目标1)。 为探究角闪烁现象对资源分配结果的影响,设置角闪烁噪声时变场景。在该场景下,令目标1和目标3的角闪烁噪声强度恒定为0.1,目标2的角闪烁强度系数发生起伏如图3所示。 图4(a)和图4(b)展示了角闪烁噪声模型下各算法的PC-CRLB和RMSE性能对比,体现了所提优化分配算法在角闪烁场景下的有效性。此外,随着目标角闪烁噪声强度的增大,跟踪精度也受到了相应的影响,使得目标PC-CRLB值与RMSE值均出现波动,但算法性能结论仍与距离影响场景一致。图4(c)展示了角闪烁噪声影响下的各目标资源分配的结果。结果表明,由于目标2的角闪烁强度最高,因此相较场景1而言获得了更多的发射资源。相反地,由于目标3的角闪烁噪声强度较低且径向距离最小,相较其余目标获得的资源最少。 由图5可知,所提优化算法在距离影响场景和角闪烁噪声影响场景均有较好的收敛性能。并且随着自适应跟踪时间的增加,算法收敛性能有所提升。此外,从仿真结果得出,在迭代次数为40次时,算法的平均计算时间约为0.79 s,小于仿真步长1 s。因此,在配备性能较强的计算机后,所提算法完全可保证资源分配任务的稳定性和时效性要求。 本文基于集中式MIMO雷达系统,提出了一种适用于角闪烁噪声下进行多目标跟踪的自适应资源分配算法。该算法通过合理分配功率和带宽资源,能够有效提高多目标跟踪精度。仿真结果表明,本文所提面向角闪烁噪声的资源优化分配算法具有良好的稳定性和时效性。1.2 信号模型
1.3 运动及观测模型


2 优化模型建立
2.1 平方根容积粒子滤波算法


2.2 基于PC-CRLB的优化目标函数

2.3 优化模型的建立
3 优化模型求解







4 仿真结果及分析


4.1 高斯白噪声影响场景
4.2 角闪烁噪声影响场景
4.3 算法收敛性检验

5 结 论