基于迁移学习与深度残差网络的滚动轴承快速故障诊断算法
2022-02-22陈仁文邢凯玲丁汕汕张迈一
刘 飞, 陈仁文, 邢凯玲, 丁汕汕, 张迈一
(1.南京航空航天大学 机械结构力学及控制国家重点实验室,南京 210016;2.南京航空航天大学 自动化学院,南京 210016)
根据统计[1],机电传动系统与电机系统由于滚动轴承故障引起的故障占40%~70%,因此开发出一种能用于工业实际的滚动轴承故障诊断算法具有重要的意义。
传统的故障诊断算法主要由三部分组成:传感器信号采集、特征提取方法和故障分类算法。传统的故障特征提取方法主要是通过时频分析方法:小波变换(wavelet transform,WT),短时傅里叶变换(short time Fourier transform,STFT)、希尔伯特黄变换(Hilbert-Huang transform,HHT)及它们的改进算法[2-3]等,将原始时域振动信号转换到时频域上,并提取出信号的统计特征[4],然后将这些构造出的特征[5]作为故障分类算法的输入。传统的故障分类算法,主要为支持向量机(support vector machine, SVM)、极限学习机(extreme learning machine, ELM)、k近邻法 (k-nearest neighbor, kNN)及它们的改进算法[6-8]等,属于浅层机器学习的方法,要与特征提取方法结合。传统的智能故障诊断算法主要有以下2个缺点:①当采用的人工特征提取方法不适合具体的任务情况时,会导致故障诊断性能急剧的下降;②人工特征都是根据具体的任务情况进行设计的,尽管其可以达到很高的准确率,但是设计出一种能应用于所有情况的特征是很困难的。
而深度学习模型通常采用堆叠有参隐含层(主要为卷积层与全连接层)的深度架构设计,能直接从原始数据中学习出有代表性的特征,并且能将特征提取与故障诊断结合在一个模型中(端到端),避免了传统故障诊断算法的缺点[9]。Sun等[10]将深度自编码器应用在电机故障诊断中并且取得了准确的预测。Ding等[11]使用小波包能量作为卷积神经网络(convolutional neural networks,CNN)的输入设计了一个轴承故障诊断系统。而增强门控循环神经网络也被Zhao等[12]用于齿轮和滚动轴承的剩余寿命预测与故障诊断中。
尽管深度学习模型已经在机械故障诊断领域中取得了很多成功的应用,但其仍然存在一些问题:
(1) 随着有参隐含层数的增加,需要训练的参数数量会迅速增加,并且从头训练一个大型深度学习网络所需要的有标签样本数量、算力和时间开销巨大。而在实际的工业生产环境中,机械设备往往都是运行在正常状态下,故障状态很少出现,所以大量的有标签故障数据无法获得[13]。
(2) 深度学习模型若在一个小样本数据集上从头开始训练,会出现过拟合的问题,导致模型的泛化能力下降,使得其应用在真实工业环境中的诊断准确率很低,因此在大多数的文献中很少使用超过10层有参隐含层的深层深度学习模型,基本都是不超过5层有参隐含层的模型[14]。
(3) 深度学习模型的超参数(具体架构,学习率和丢弃率等)的选择和优化会明显影响模型的性能,并且很耗费训练时间。
针对上述问题,在机械故障诊断领域中引入了迁移学习的方法。Wen等[15]提出了基于稀疏自编码器与迁移学习的多工况故障诊断方法。Shen等[16]提出了基于迁移学习的轴承故障诊断方法,其中通过迁移辅助数据来改善不同工况下的诊断性能。Siyu等提出了一个基于深度迁移学习的故障诊断架构,并且在3个不同的数据集上都取得优秀的性能。雷亚国等基于领域共享深度残差网络实现了从实验室轴承故障模型迁移应用到实际机车轴承的故障诊断方法。
但现有的迁移学习方法,仍然需要在某一故障数据集上从头训练深度学习模型,因此仍然需要耗费大量的时间来训练和优化深度学习模型。而机械故障数据集的大小限制了更深层深度学习模型的应用。
因此,本文提出了一种基于迁移学习与深度残差网络的滚动轴承快速故障诊断算法(transfer learning deep residual network,TL-ResNet),本算法的创新点在于:
(1) 开发了一种结合STFT与伪彩色处理的方法能将时域振动信号快速地转换为三通道图像数据,使得计算机视觉(computer version,CV)领域中的深度学习模型能直接迁移应用到故障诊断领域当中。
(2) 通过迁移学习方法,使得在轴承故障诊断领域中能应用超过10层卷积层的深层深度学习模型,解决了因缺少大量轴承故障标注数据导致无法训练深层深度学习模型的问题,同时模型仅需很短的训练时间。具体使用在ImageNet数据集上的训练的ResNet18模型作为预训练模型,采用低层网络结构和参数冻结,高层网络参数使用滚动轴承故障图像数据进行训练的迁移学习方法。试验结果表明TL-ResNet具有很强的特征自提取能力,与其他深层深度学习模型相比具有更好的故障诊断表现与更短的训练时间。
(3) 针对实际工业环境中经常出现的滚动轴承在不同工况下的故障诊断问题,提出采用小样本迁移的方法来解决,并与直接应用TL-ResNet的方法开展对比试验。试验结果表明,本方法具有训练时间短,故障诊断准确率高的优点,能作为一种快速故障诊断方法用于工业实际中。
1 理论基础
1.1 时频图像生成方法
在一般的滚动轴承故障诊断系统中,数据采集系统采集到的原始振动信号都是一维时变非稳态信号,而在CV领域里,一般输入都是三通道图像数据。因此,要使用CV领域里的深度学习模型作为预训练模型,必须要将一维振动信号转换成二维图像数据。
将一维振动信号变换为二维图像数据的方法主要分为两类:
(1) 基于数据重构的方法,即直接将一维振动信号等间隔进行截取拼接,生成二维灰度图像。该方法的优点是实现起来简单快速,但其缺少信号的频域信息。
(2) 基于时频域变换的方法,该方法包括STFT、WT和HHT等。通过对一维振动信号进行时频分析,生成具有物理意义的二维灰度时频图像,其能充分挖掘出信号的频域特征,具有鲁棒性高、抗噪声等优点。但是其在实现速度上较基于数据重构的方法慢,尤其是使用WT方法时。
为了兼顾快速性与信息含量,本算法采用STFT来生成二维时频图像。STFT的基本思想是将一维时域信号傅里叶变换的积分区间局部化。信号x(t)与有限时窗信号w(t)乘积后再进行傅里叶变换,实现同时分析信号的时域特性和频域特性。STFT的定义如下
(1)
实际使用STFT的离散形式来进行计算,公式如下
m=0,1,…,N-1
(2)
式中:时窗信号w(t)的宽度为N;序列x[k]为连续信号x(t)的采样信号,采样频域满足香农采样定理。
因为,通过STFT生成的二维时频图是单通道的灰度图像[17],不能直接作为CV领域深度学习模型的输入。文献[18]中采用将模型第一层的通道数改为1,保持后面的模型参数不变,在进行迁移学习时,同时对第一层进行学习调整的方法。而Siyu等的研究中使用对单通道数据进行复制,通过矩阵拼接操作生成三通道图像数据的方法。
本文则创新的使用openCV开源框架的伪彩色处理方法,将单通道的灰度值映射成彩色值来生成三通道图像,作为深度学习模型的输入,无需对模型第一层再进行学习调整。
1.2 卷积神经网络
经典的CNN由卷积层、池化层、全连接层和Softmax分类器组成[19]。卷积层和池化层用于提取和筛选图像特征,全连接层用于进一步提取池化层的输出特征,Softmax层把全连接层的输出做归一化处理,使其符合概率分布。
经典的CNN结构如图1所示。

图1 典型的CNN结构图
卷积层是CNN的核心,其通过计算二维卷积核与对应输入图像重叠区域的内积,并历遍整个图像上的每一个像素,通过一个非线性激活函数,求得输出。具体的数学表达式如下
Xl=f(Kl*Xl-1+Bl)
(3)
式中:*为卷积运算;Xl-1为第l卷积层的输入图像;Xl为第l卷积层的输出;Bl为第l卷积层的偏置;f(·)为激活函数,CNN中常用ReLU作为激活函数,其数学表达式如下
ReLU(x)=max(0,x),x∈(-∞,+∞)
(4)
对于多通道图像输入,卷积层会在每个通道上使用不同卷积核,计算公式如下
(5)

池化层通常位于卷积层后,对卷积后的输出特征图进行降维减参操作。常用的池化层可分为最大池化和平均池化。池化操作定义如下
(6)

CNN的最后一层为一个全连接层,用于执行分类或回归任务,其数学定义如下

(7)

对于分类任务通常使用Softmax激活函数,其定义如下
(8)

在CNN的训练中,通常使用交叉熵函数,来评估真实标签与预测概率之间误差,定义如下
(9)
式中:1{·}为指示函数,当大括号内的判断为真时,取值为1,否则为0;假设训练集的样本总数为N,则交叉熵损失函数定义如下
(10)

1.3 深度残差网络
深度残差网络(deep residual network,ResNet)通过构建残差块,使用残差连接,即让神经网络的输入X通过一个恒等映射I:X→X直接连接到有参层的输出Y,使得有参层学习到一个残差映射f:X→Y-X。在ResNet18模型中的残差块结构形式如下图2所示。

图2 ResNet18中的残差块结构
图2中左图为标准残差块(indentity residual block,IRB),右图为带降采样层的残差块(sampling residual block,SRB),降采样层用来保持特征图的尺寸和通道数一致。
文献[20]的研究表明,相比于传统的CNN让有参隐含层直接学习输入输出之间的映射f:X→Y,让有参层学习残差映射f:X→Y-X能有效降低映射的学习难度,加快模型的收敛速度,因此,能够搭建出有效的超深层(超过100层)神经网络模型。
而滚动轴承故障数据集的大小,与训练原始ResNet的ImageNet数据集相比小的多。因此,综合考虑滚动轴承故障诊断任务的复杂度与模型的前向推理速度,本文提出采用在ImageNet数据集下训练的ResNet18模型,作为滚动轴承故障诊断的预训练模型。ResNet18模型的详细架构和参数信息如表1所示。
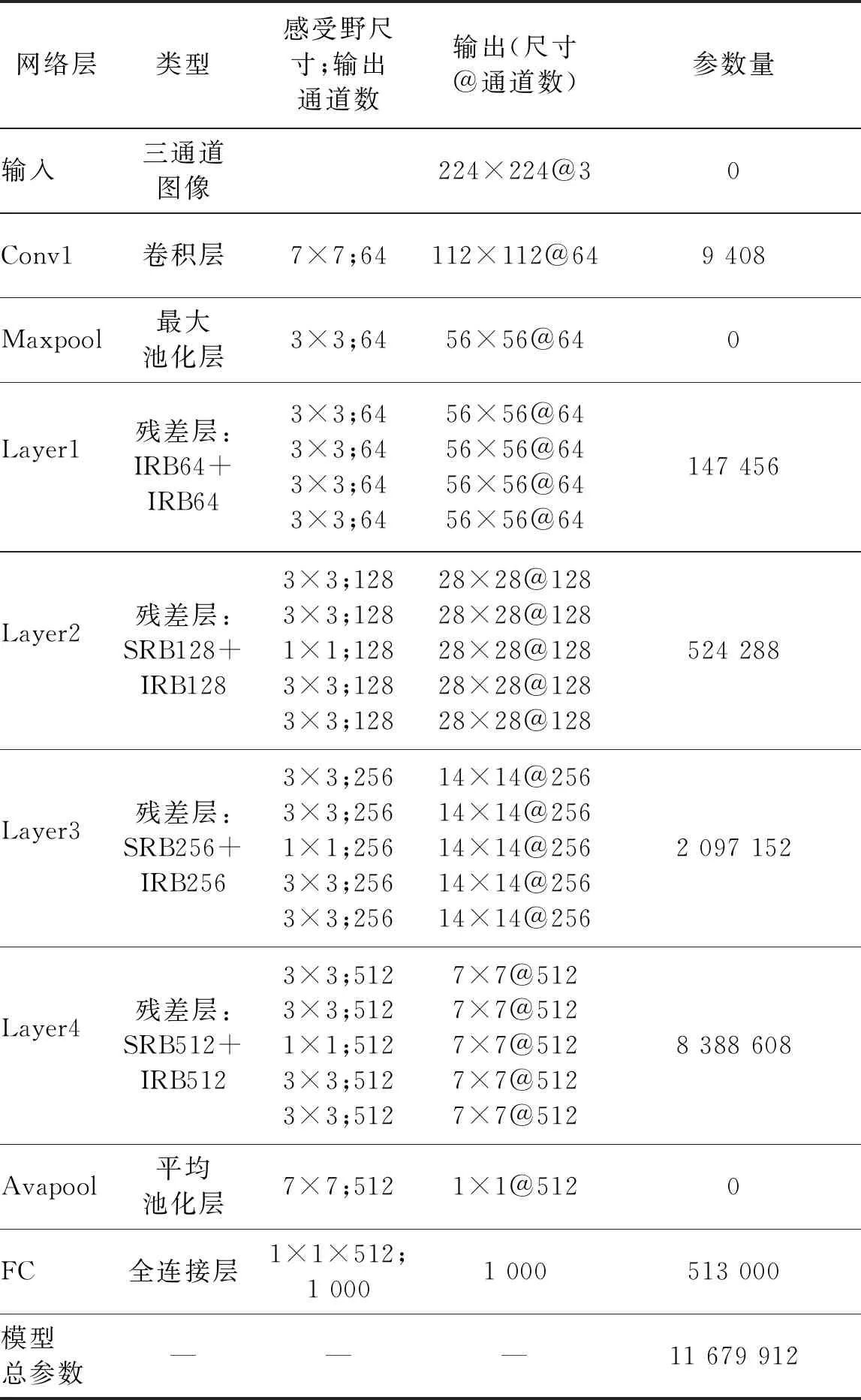
表1 ResNet18模型详细架构
1.4 迁移学习方法
迁移学习的定义[21]如下:给定源域Ds={Xs,P(Xs)}和学习任务Ts={Ys,fs(·)}、目标域Dt={Xt,Q(Xt)}和学习任务Tt={Yt,ft(·)},迁移学习的目的是获取源域Ds和学习任务Ts中的知识以帮助提升目标域中的预测函数ft(·)的学习,其中Ds≠Dt或者Ts≠Tt。
对于CNN模型,Yosinski等[22]通过大量试验评估了不同位置卷积层的迁移能力,试验发现:低层特征具有很强的迁移能力,而高层卷积层的特征都是和具体任务相关的抽象特征,不适合进行迁移,需要在新数据集上再学习训练。此外,源域和目标域间的相似程度是迁移学习成功的关键,对于相似的数据集仅需对最后的全连接层进行训练就能取得很好的性能表现,而对于差别比较大的数据集需要对较多的高层卷积层参数进行训练更新。
基于此结论,本文采用低层网络结构和参数冻结,高层网络参数使用轴承故障图像数据训练的迁移学习方法。
2 算法详细
本文提出的基于迁移学习与深度残差网络的滚动轴承快速故障诊断算法(TL-ResNet),能够从时频图中自动提取出轴承的故障特征,具有高诊断准确率,模型训练时间短的优点。本算法的框架如图3所示。
具体由时频图像生成,预训练模型迁移,和模型应用3个步骤组成。
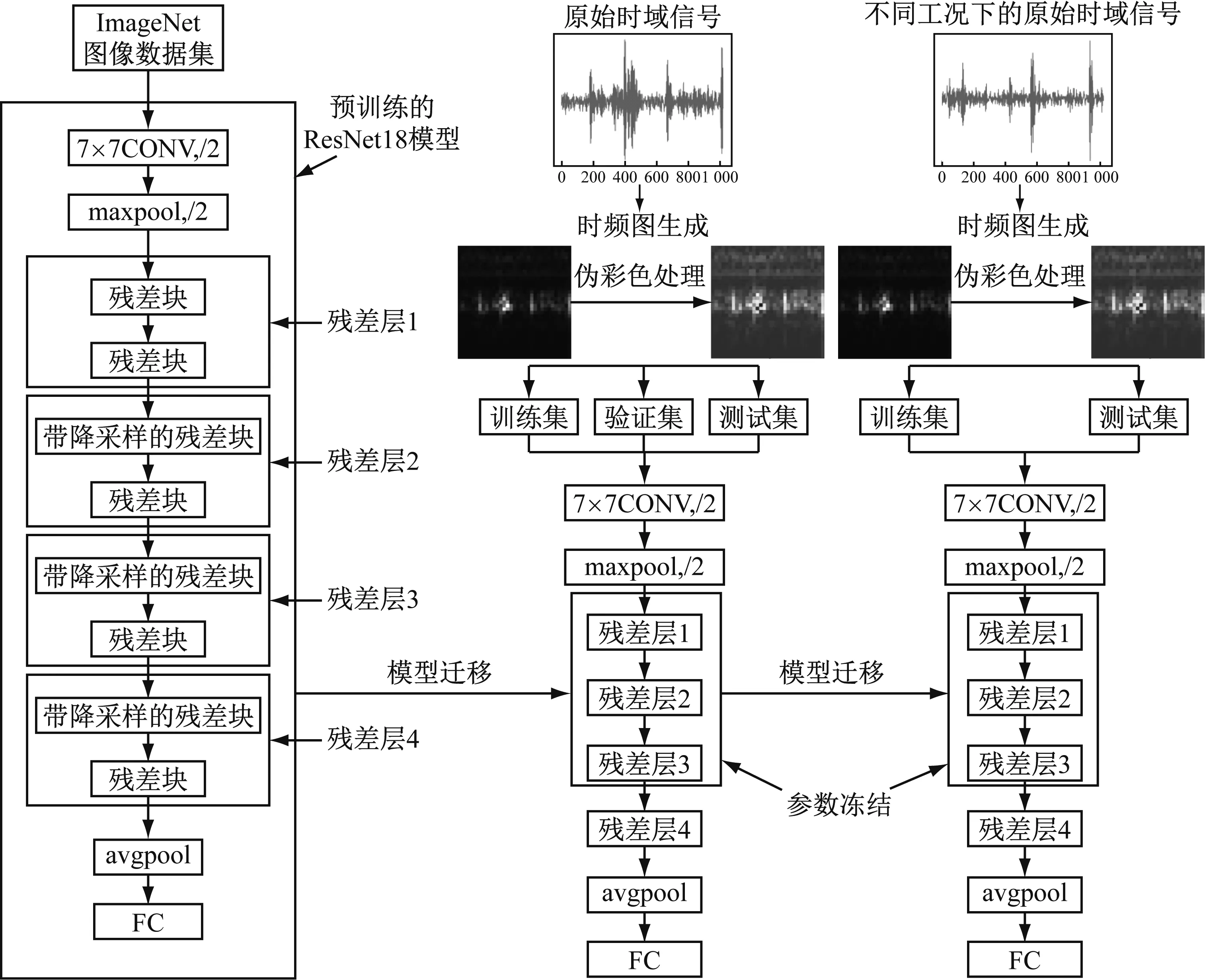
图3 TL-ResNet框架示意图
(1) 时频图像生成:本文提出STFT加伪彩色处理的方法将时域振动信号转换为三通道图像数据,STFT方法中使用汉明窗函数,窗函数宽度为64个振动信号数据点。伪彩色处理方法使用openCV开源框架的applyColorMap函数及COLORMAP_JET彩色映射表来实现。
(2) 预训练模型迁移:本文的预训练模型使用在ImageNet图像数据集上训练ResNet18模型。保留原始ResNet18模型的大部分架构,但移除最后1 000输出全连接层,并冻结Conv1和前3个残差层的参数,作为浅层故障特征提取器,然后,将第4残差层的参数做随机初始化,用于学习滚动轴承故障的深层特征,最后,增加一个10输出全连接层,并采用Softmax激活函数得到故障诊断的结果。
通过一定轮数的训练集迭代历遍就能得到TL-ResNet模型,将TL-ResNet的参数持久化用于模型的具体应用。
(3) 模型应用:滚动轴承数据集中分割出的测试集被用于测试持久化后的TL-ResNet模型的真实故障诊断表现,即将测试集上对故障样本的分类预测的准确率作为故障诊断准确率。
而对于滚动轴承在不同工况下的故障诊断问题,采用小样本迁移的方法对TL-ResNet模型进行调整。即将某一工况下生成的TL-ResNet的结构与参数冻结,仅使用另一工况的少量训练样本(小样本),对TL-ResNet模型的全连接层进行一轮训练微调,然后在另一工况的测试集上进行检验。
3 试验验证
为验证本文提出的快速故障诊断算法的有效性,在i7-8750h,16 g内存,GTX 1060max-q,windows10操作系统下,参考文献[23]中的开源代码,通过pytorch框架实现了本文所提出的算法,并进行相关的试验验证。
试验中深度学习模型每次训练的批大小设置为32个样本,采用Adam优化方法,反向传播更新深度学习模型的参数,学习率设置为0.001,权重衰减设置为0.000 01,使用经典的交叉熵损失函数。
3.1 滚动轴承数据集简介
本文使用凯斯西储大学(Case Western Reserve University,CWRU)的滚动轴承数据集和帕德博恩大学(Paderborn University,PU)的滚动轴承数据集[24]来进行试验验证,试验平台如图4和图5所示。
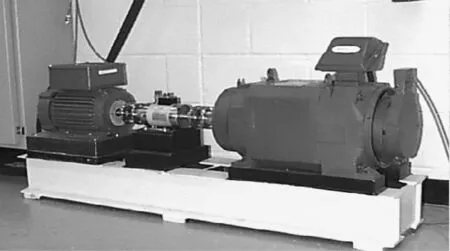
图4 CWRU滚动轴承试验平台
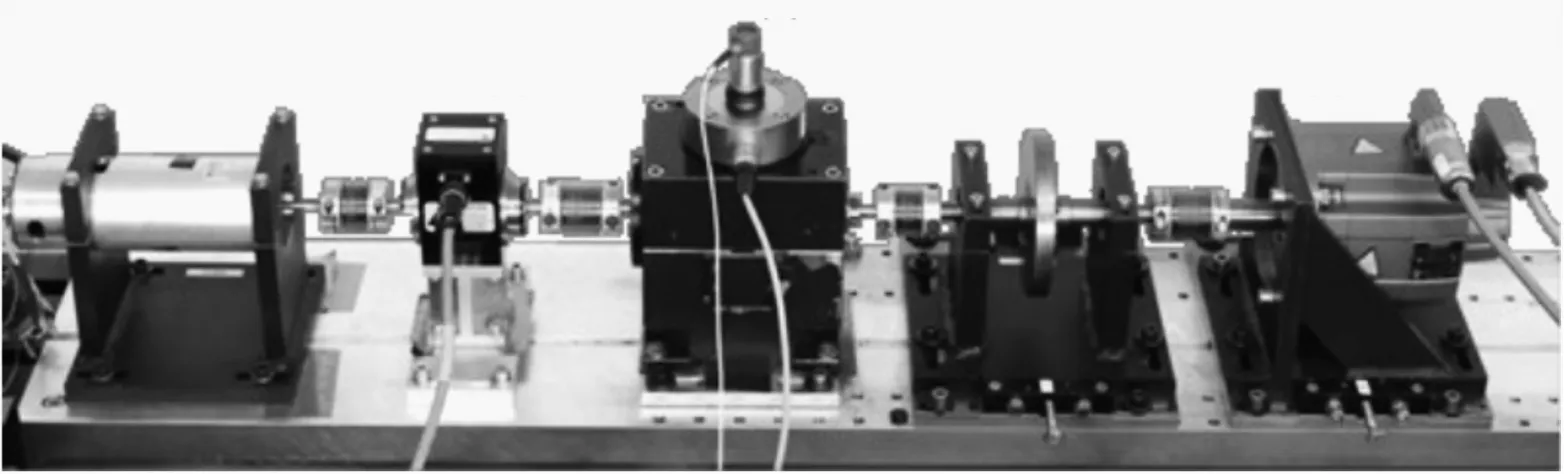
图5 PU滚动轴承试验平台
CWRU数据集中使用的是由SKF公司生产,型号为6205-2RS的滚动轴承来开展故障诊断试验。其在12 kHz的采样频率下,采集了4种不同工况时的滚动轴承振动信号。在每种工况下,对滚珠、内滚道和外滚道分别引入直径为0.178 mm、0.356 mm、0.532 mm的单点故障的滚动轴承进行了试验,加上正常滚动轴承的试验数据,每个工况都有10种不同的故障类型,如下表2所示。
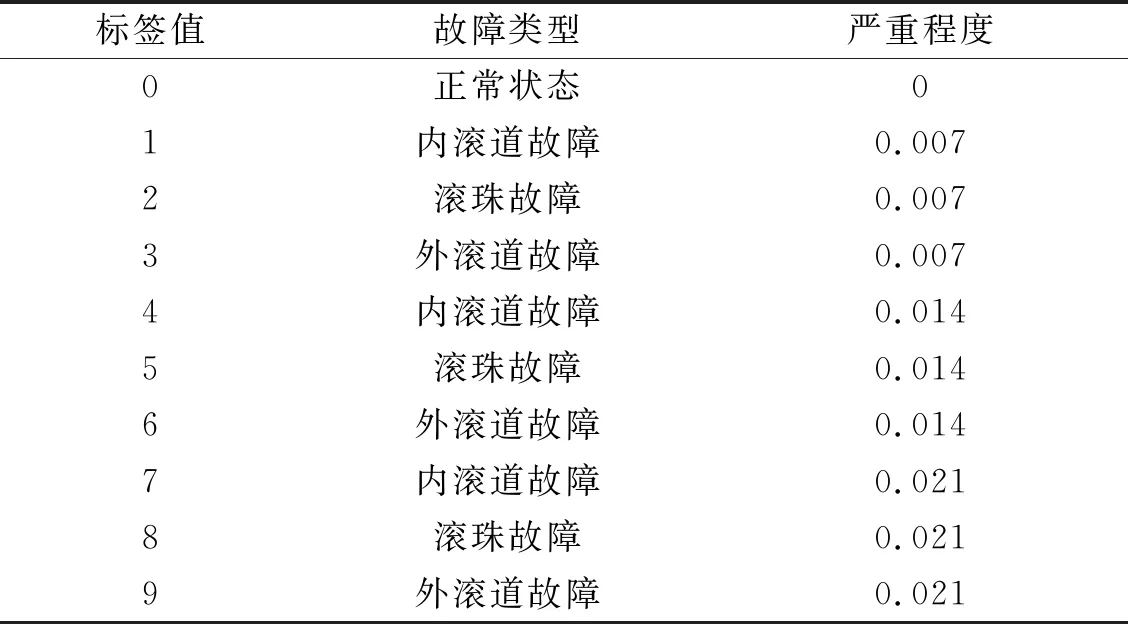
表2 CWRU轴承故障分类及标签值
对CWRU数据集中的原始振动信号,采用无重叠分割,每1 024个数据点组成一个样本,得到试验样本数量如表3所示。

表3 CWRU样本数量表
而PU数据集中使用的是由FAG、MTK和IBU公司生产的型号为6203的滚动轴承来进行故障诊断试验。其在64 kHz的采样率下,采集了32组不同故障类型的振动信号数据。本文使用其中由加速疲劳试验产生真实故障的试验数据,总共18组,具体使用的数据编号如表4所示。

表4 PU滚动轴承数据集真实故障数据分类及标签值
3.2 不同输入和不同预训练模型迁移试验结果与分析
为验证本算法的有效性,设计了使用STFT生成的单通道灰度图像数据作为模型的输入,并采用CV领域中其他5种常用的深度学习模型(LeNe、AlexNet、CNN、VGG16和inception-V3)作为预训练模型的对比试验。
其中,LeNet模型是最经典的2层卷积层模型,模型结构简单,没有预训练模型可以加载,通过CWRU数据集中从头训练得到。
而CNN模型来自Zhao等研究中设计的由7层卷积神经网络组成的通用机械故障诊断模型,在CWRU数据集中从头训练得到。
AlexNet模型是一个具有5层卷积层的模型,模型参数数量较少,而VGG16和inception-V3模型都是卷积层超过10层的深层卷积神经网络,模型复杂,参数数量众多,并且AlexNet、VGG16和inception-V3模型都有在ImageNet上训练好的预训练模型。因此,采用与TL-ResNet相同的迁移学习方法,构成TL-AlexNet、TL-VGG16和TL-inceptionV3模型,在同样的训练条件下,进行训练。
将预训练模型迁移到某一工况时,将该工况下的滚动轴承数据集样本按照64%,16%,20%的比例随机分配到训练集、验证集与测试集中。
得到的试验结果如下:工况0时,使用单通道图像数据,迭代历遍10轮训练集来训练模型,重复10次试验,各个模型的平均准确率对比如表5所示。
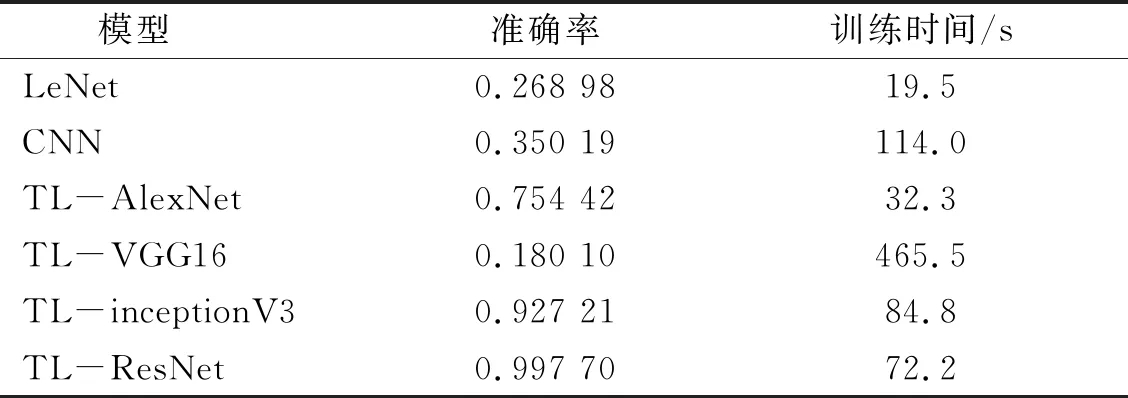
表5 工况0、单通道及10轮迭代历遍的对比试验结果
工况0时,使用三通道图像数据,迭代历遍2轮训练集来训练模型,重复10次试验,各个模型的平均准确率对比如表6所示。
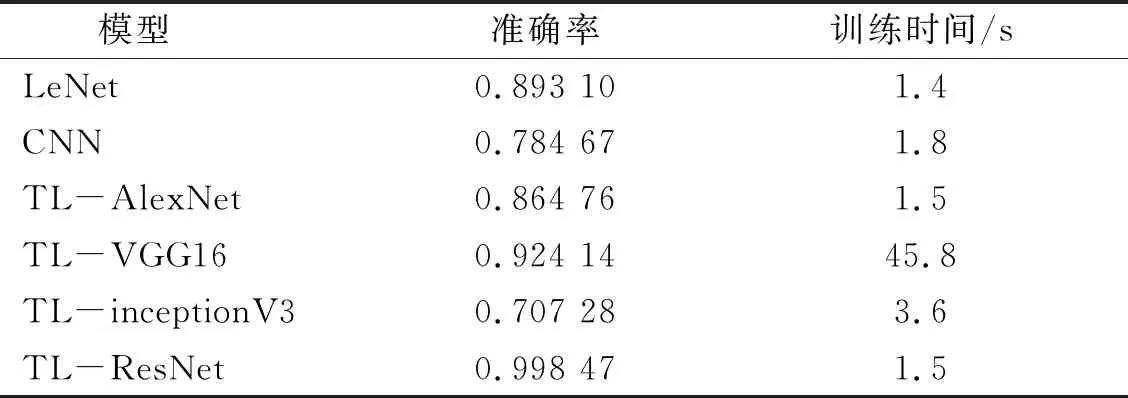
表6 工况0、三通道及2轮迭代历遍的对比试验结果
工况0时,使用三通道图像数据,迭代历遍10轮训练集来训练模型,重复10次试验,各个模型的平均准确率对比如表7所示。
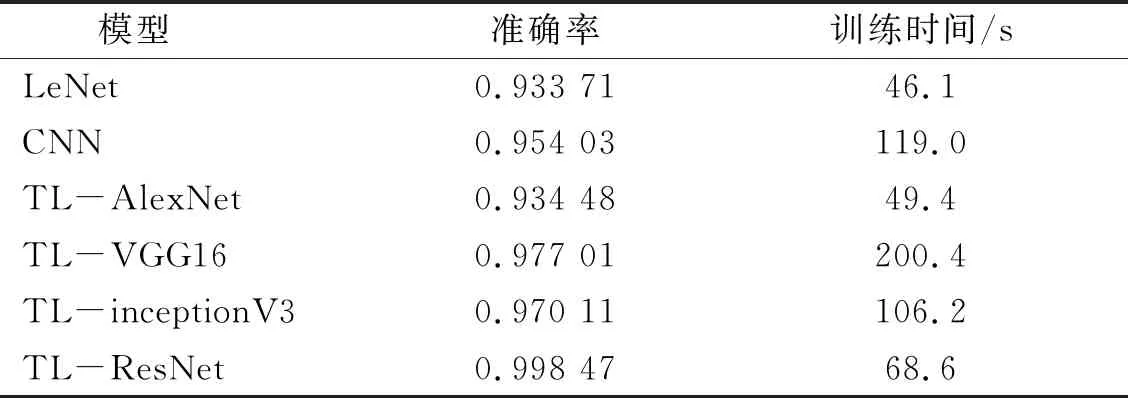
表7 工况0、三通道及10轮迭代历遍的对比试验结果
上述试验的故障诊断准确率对比如图6所示。
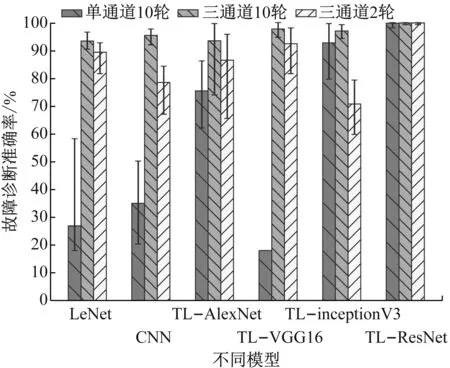
图6 工况0时,不同通道图像输入的诊断准确率对比
从工况0时,迭代历遍10轮训练集的三通道图像数据与单通道图像数据的对比试验中可以看出,使用STFT加伪彩色处理方法,能取得比单通道图像数据更高的诊断准确率。
在上述试验中,无论是在单通道数据集还是三通道数据集上,TL-ResNet的故障诊断准确率都是最高的,且与其他深层深度学习模型的训练时间相比(即与CNN、TL-VGG16和TL-inceptionV3相比),TL-ResNet所需的训练时间最短。
特别的TL-ResNet在仅2轮迭代历遍训练集的情况下,就能取得99.8%的诊断准确率,而此时所需的训练时间仅要1.5 s,比使用单通道10迭代历遍的诊断准确率还高,而所花费的训练时间仅为其的2%。
这表明,本算法可以作为实际工业情况下的滚动轴承快速故障诊断方法来使用。
为了进一步验证本文所使用的迁移学习方法的有效性,从头训练了TL-AlexNet、TL-VGG16、TL-inceptioV3和TL-ResNet这4个模型,具体的对比试验结果如下:在工况0、单通道与10轮迭代历遍训练集的情况下,从头训练上述4种深度学习模型,重复10次试验,各个模型的平均准确率对比如表8所示。
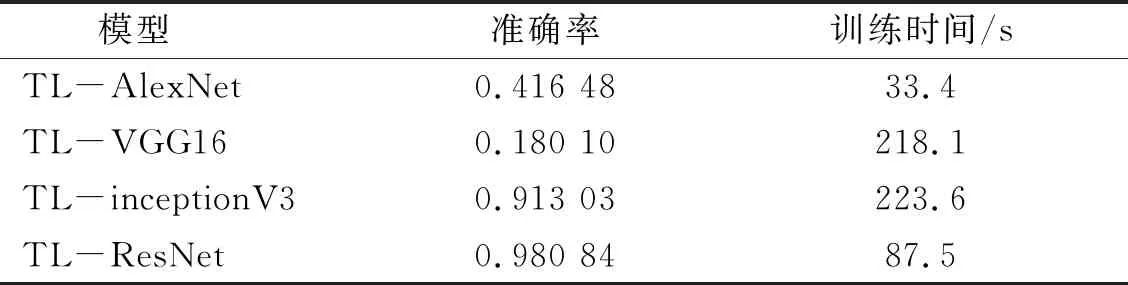
表8 工况0、单通道、从头训练及10轮迭代历遍的对比试验结果
在工况0、三通道与10轮迭代历遍训练集的情况下,从头训练上述4种深度学习模型,重复10次试验,各个模型的平均准确率对比如表9所示。
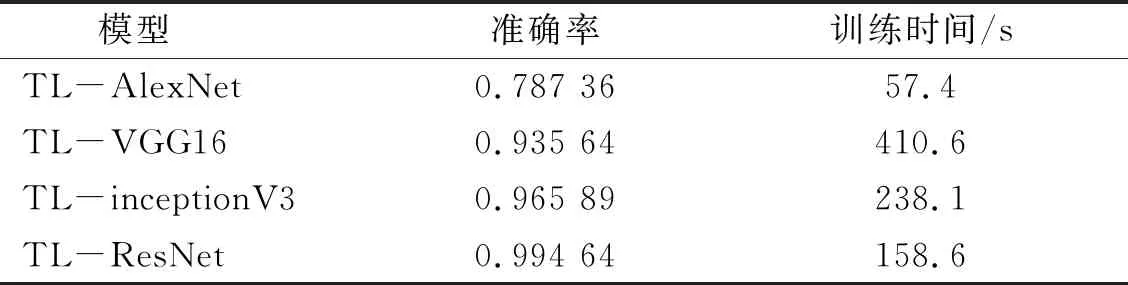
表9 工况0、三通道、从头训练及10轮迭代历遍的对比试验结果
将上述从头训练得到的试验结果与采用迁移学习方法的试验结果对比如下图7所示。
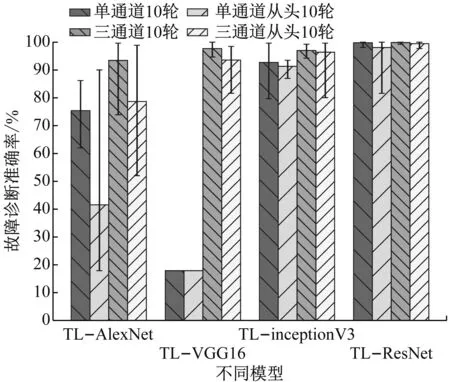
图7 工况0时, 从头训练与迁移学习的诊断准确率对比
从上述对比试验中可以得到结论:
(1) 无论是单通道图像输入还是三通道图像输入,使用迁移学习方法均能得到更好的故障诊断表现。
(2) 对于从头训练深度学习模型的情况,使用三通道数据仍能得到的更高的故障诊断准确率。因此,三通道图像数据比单通道图像数据更适合用于基于深度学习模型的故障诊断。
(3) 本文提出的TL-ResNet不管是在单通道数据集上还是三通道数据集上都有最好的诊断准确率,并且从头进行训练所需的时间在深层深度学习模型中也是最少的。
3.3 不同工况间的小样本迁移试验
对于滚动轴承在不同工况下的故障诊断问题,利用CWRU数据集提供的4种不同工况下的试验数据,提出采用小样本迁移的方法对TL-ResNet模型进行调整,研究TL-ResNet在不同工况间的迁移效果。
本文中的迁移任务0→1表示将工况0下生成的TL-ResNet模型(即工况0为源域),迁移应用到工况1下的滚动轴承故障诊断问题中(即目标域为工况1)。
TL-ResNet在不同工况间迁移应用时,把目标域工况数据集中20%的样本作为小样本训练集,剩下的80%作为测试集,用于确定模型在不同工况下的真实诊断表现。
使用仅2轮迭代历遍某一工况三通道图像训练集迁移生成的TL-ResNet模型,采用小样本迁移与直接应用的方法对可能存在的12种工况迁移情况开展对比试验,重复10次试验得到的结果如图8所示。
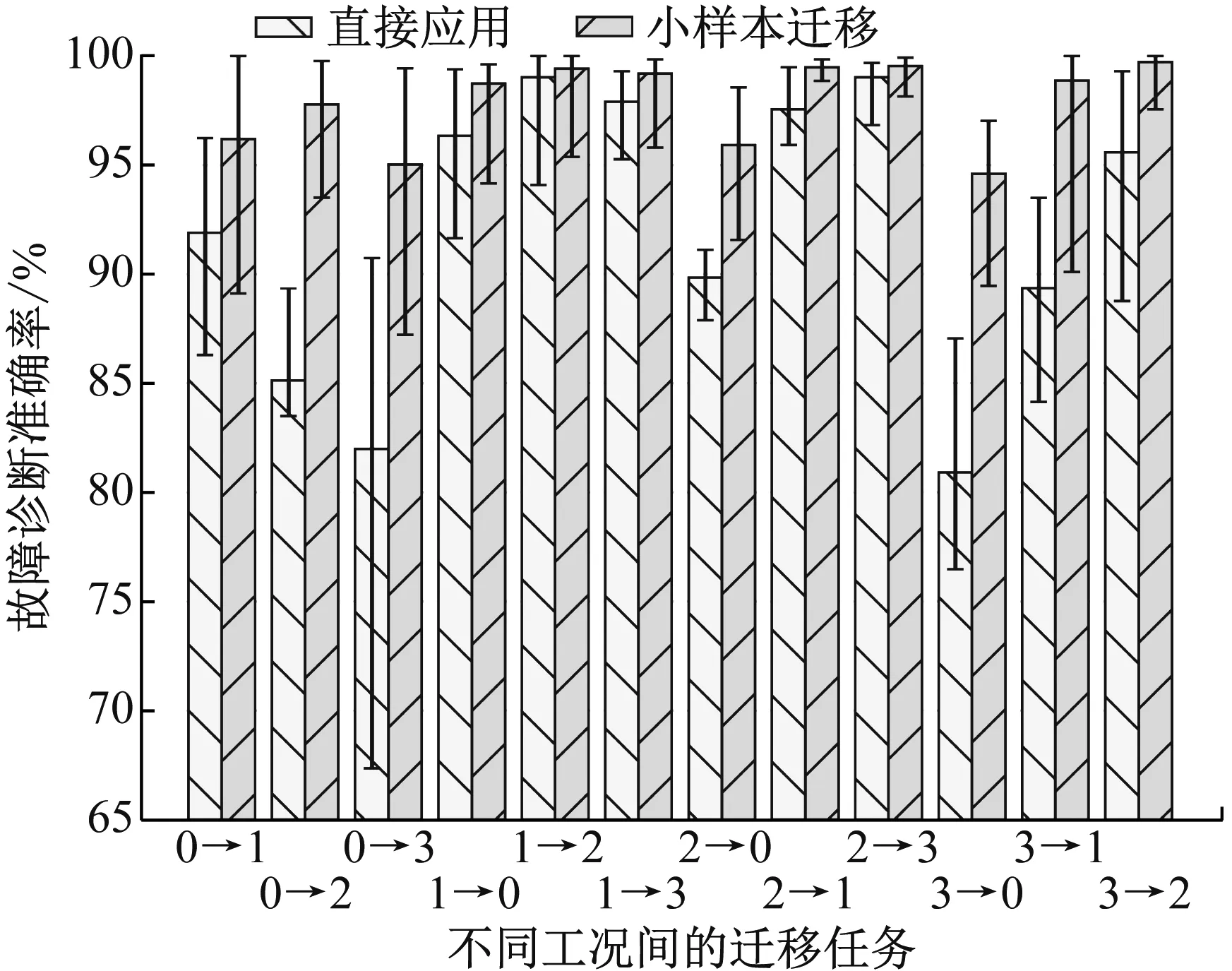
图8 TL-ResNet在不同工况迁移任务时的故障诊断准确率对比
从图8可知,采用小样本迁移方法比直接应用方法的故障诊断准确率更高,即具有更好的诊断效果。
通过t-分布领域嵌入算法可以将TL-ResNet全连接层提取出的故障特征,降维至二维平面,并以散点图的形式呈现,如图9~图12所示。

(a) 源域为工况0

(a) 源域为工况1

(a) 源域为工况3
在3→0迁移任务的故障特征散点图中,0.014英寸滚子故障特征与0.532 mm的滚子故障特征存在重叠现象,因此图8中3→0迁移任务故障诊断准确率较低。同理,在0→3迁移任务的故障特征散点图中,0.356 mm滚子故障特征与0.356 mm内圈故障特征存在重叠现象,因此图8中0→3迁移任务故障诊断准确率也较低。而其他迁移任务的故障诊断准确率均在95%以上,故障特征散点图中各个故障类别也具有明显的界限。
因此,本文所提出的TL-ResNet算法在CWRU数据集的各种工况迁移任务中都能有效地提取出轴承故障特征,具有故障诊断准确率高,训练速度快的优点。
3.4 小样本大小对工况迁移任务的影响
3.3节中从目标域数据集中随机分割出20%的样本(工况0为261个样本,工况1、2为307个样本,工况3为308个样本)作为小样本训练集,得到了优越的试验结果。
而在基于深度学习的方法中,训练样本的大小对试验结果具有显著的影响。为此,本节通过调整目标域数据集的分割比例,分别为1%、5%、10%、15%、30%,生成不同大小的小样本训练集,随机选取任一工况,某次训练好的TL-ResNet模型,在12种可能的工况迁移任务上开展对比试验,每种任务重复10次试验取平均值,试验结果如图13所示。
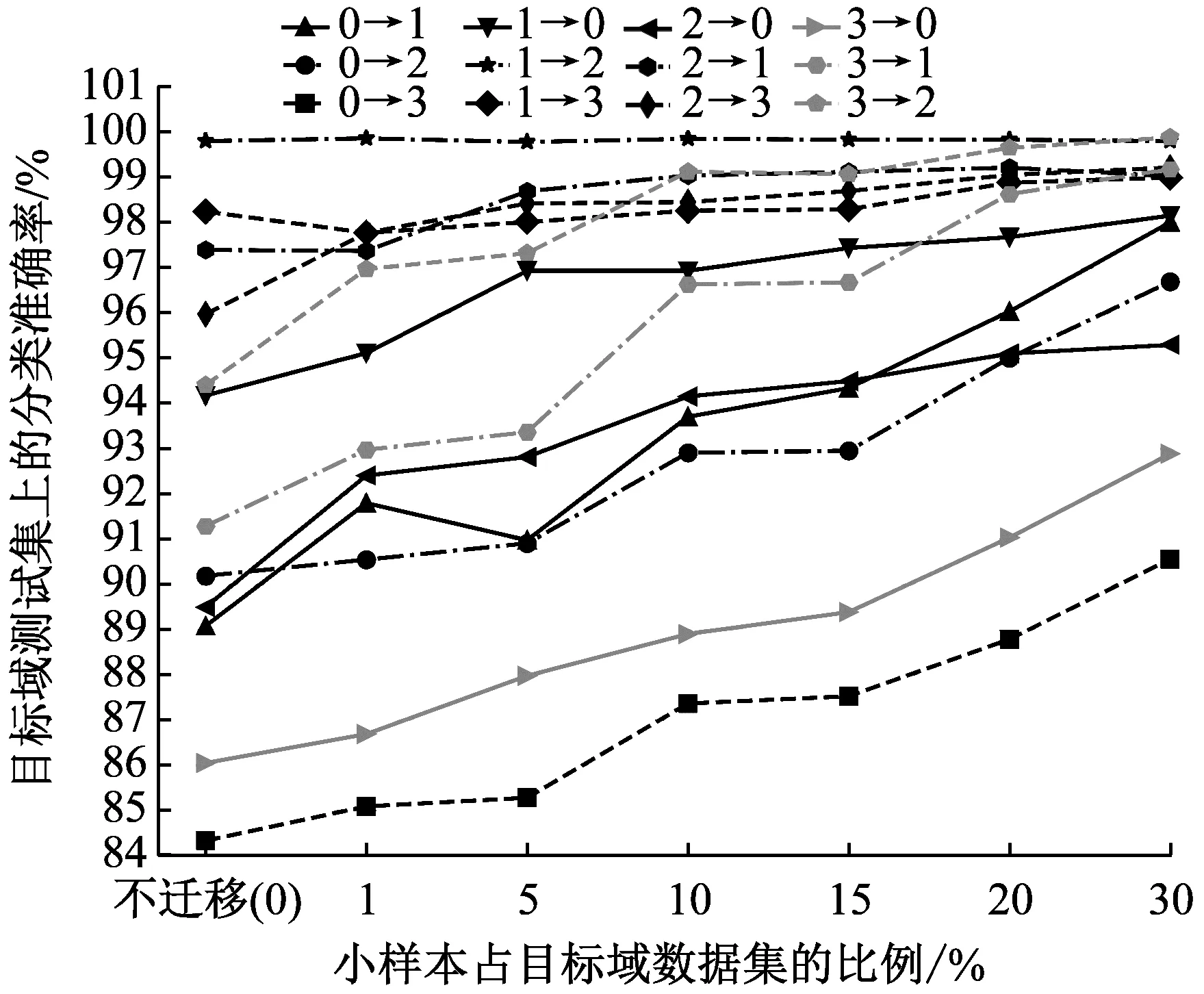
图13 小样本大小对工况迁移任务的影响
从试验结果中可以看出,小样本占目标数据集的比例(即小样本大小)为20%时,除了0→3任务外都能达到90%以上的故障诊断准确率,再除开3→0任务外其他任务都能达到95%以上的准确率,与3.3节的试验结果与分析相符。而当小样本大小为30%时,仅在模型不迁移时诊断准确率较低的任务(0→3,3→0,0→1)上会有显著地提升,其他任务较20%的提升不显著。
当小样本大小选取为1%时(工况0为13个样本,工况1、2、3为15个样本)试验结果相对于不迁移训练的提升有限,且在1→3和2→1任务中略有下降。因为1→3和2→1任务在不迁移时的故障诊断准确率已经分别达到98%和97%以上,而小样本大小为1%时,用于训练的样本数量极少,平均每种故障的样本就1个或2个,而采用随机生成的方法,在这种情况下会导致各类故障样本的数量分布极不平衡(部分故障样本可能就没有出现过,而部分样本又可能出现了3次以上),这会导致模型迁移后的诊断准确率降低。而当小样本大小选取为5%时,相对于1%的提升有限,且在0→1任务上,同样也存在小样本数据分布不平衡引起的准确率下降。当小样本大小为10%时,各个迁移任务的诊断准确率都较不迁移有较为显著的提升,而为15%时较10%的提升有限。
综上,可以认为小样本的大小为目标域数据集的10%及以上时,应用小样本迁移才能取得明显的和稳定的准确率提升。总体上不断增加小样本的大小,工况迁移任务的故障诊断准确率会得到不断地提升,而20%的比例能较好地平衡性能提升与小样本的大小。
3.5 TL-ResNet与经典滚动轴承故障诊断算法的对比
本节使用帕德博恩大学的滚动轴承数据集进行试验验证,根据Lessmeier等研究中的试验基准,使用相同的5折交叉验证方法,训练与测试TL-ResNet模型,其中测试集样本比例为33%。因为PU数据集的数据具有高采样率,和故障模式复杂的特点,在试验中采用无重叠分割将数据集中连续的4 096个数据点作为一个样本,通过10轮迭代历遍训练集进行ImageNet预训练模型的迁移,得到用于PU数据集的TL-ResNet,其余试验参数的设置同CWRU数据集试验。
试验结果与经典滚动轴承故障诊断算法基准结果的对比如表10所示。其中,经典滚动轴承故障诊断算法采用振动包络谱分析作为故障特征提取器,故障分类器算法分别为:分类与回归树(CART)、随机森林(RF)、Boosted树(BT)、神经网络(NN)、融合粒子群参数优化的支持向量机(SVM-PSO)、极限学习机、k最近邻(kNN)和集成算法(Ensemble)。
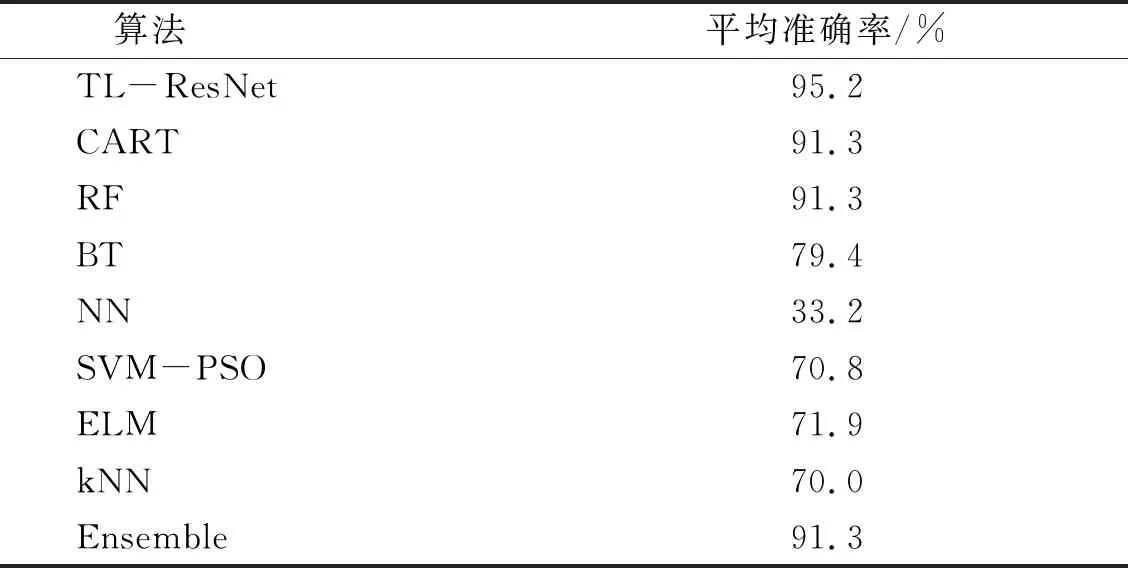
表10 TL-ResNet与经典故障诊断算法的试验结果对比
根据对比试验结果,本文所提出的TL-ResNet在测试集上的平均分类准确率为95.2%,超过了所有经典滚动轴承故障诊断算法,显示出本算法面对复杂故障诊断问题时仍具有强大的故障诊断能力。
而平均诊断准确率低于CWRU数据集上的试验,是因为在PU试验中使用的是滚动轴承的真实故障数据,且每个标签都包含有不同故障模式生成的数据,故障模式比CWRU数据更为复杂(包含了复合、分布式故障等),类内差别大,取得精确度故障诊断结果难度高。
4 结 论
本文提出了一种基于迁移学习与深度残差网络的滚动轴承快速故障诊断算法(TL-ResNet),成功将ImageNet图像数据集上的预训练模型迁移应用到滚动轴承故障诊断领域中,且通过小样本迁移将TL-ResNet应用到不同工况下的滚动轴承故障诊断问题中。
(1) 在CWRU轴承故障数据集上,对TL-ResNet进行了试验验证,在2轮迭代历遍训练集的条件下,训练时间仅要1.5 s,故障诊断准确率达到99.8%。而对于不同工况下的轴承故障诊断问题,本算法也能达到95%以上的平均故障诊断准确率。因此,本算法具有训练速度快、泛化能力强和故障诊断准确率高的优点。
(2) 在PU数据集上本方法超过了所有经典算法的诊断准确率,这验证了本方法面对真实复杂轴承故障时强大的诊断能力。其能作为一种快速故障诊断方法用于工业实际中。
(3) CWRU与PU数据集中包含了不同类型滚动轴承的故障数据,而TL-ResNet在试验中都能取得很高的故障诊断准确率,因此,可以认为本算法适用于大多数不同类型滚动轴承的故障诊断。
本算法使用ImageNet数据集上训练的ResNet18模型作为预训练模型,将其前3层残差层充当经典算法中的特征提取器,不涉及滚动轴承故障诊断领域中的先验知识。因此,只要能将机械设备的故障诊断问题转化为图像形式的分类问题,TL-ResNet就能使用。根据Siyu等和Zhao等研究中的经验,本算法理论上也能用于齿轮、电机和水泵等旋转机械的故障诊断问题,但还需要进一步的试验来验证。
未来将对本算法进行进一步改进,将其推广到旋转机械的故障诊断领域中,并开展相关的试验验证,同时,可将本算法移植到边缘计算端,开发出一套具有实时故障诊断能力的嵌入式平台,并在实际工业环境中进行试验。
